UR5_User_Manual_zh_Global.pdf - 第35页
. . 5 电气接口 5.1 简介 本章描述了机器人手臂和控制箱的所有电气接口。 这些接口分为五类,每类接口有不同的用途和属性: • 控制器 I/O • 工具 I/O • 以太网 • 电源连接 • 机器人连接 “I/O” 一词是指进出接口的数字及模拟控制信号。 下文对这五类接口进行了说明,大部分类型的 I/O 都提供有示例。 下一节的警告和小心事项与这五组接口均有关,请务必遵守这些事项。 5.2 电气警告和小心事项 在设计 和安 装机 …
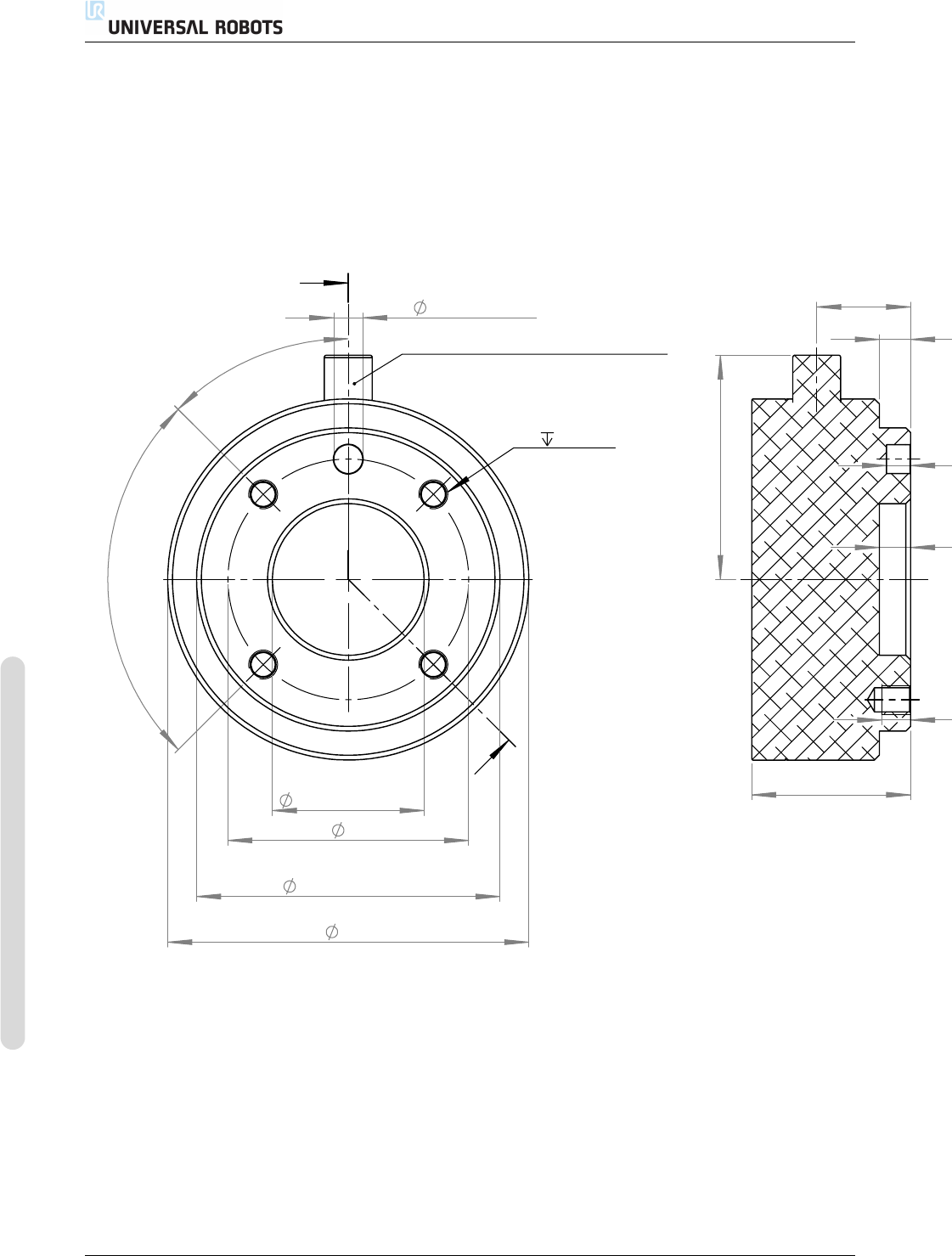
4.3 安装
31,5
0
+
0,025
(H7)
50
63
-
0,05
0
(h8)
75
6 0
+
0,015
(H7)
90°
(x4)
45°
A
A
Lumberg RKMV 8-354 connector
M6
6,0 (x4)
33
46,6
19,5
6,5
5
6,5
6
SECTION A-A
图 4.2: 工具输出法兰(符合 ISO 9409-1-50-4-M6 标准)。此处显示的是机器人顶端的工具安装位置。所
有测量值均以 mm 为单位。
UR5/CB3 I-22 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
.
.5 电气接口
5.1 简介
本章描述了机器人手臂和控制箱的所有电气接口。
这些接口分为五类,每类接口有不同的用途和属性:
• 控制器 I/O
• 工具 I/O
• 以太网
• 电源连接
• 机器人连接
“I/O” 一词是指进出接口的数字及模拟控制信号。
下文对这五类接口进行了说明,大部分类型的 I/O 都提供有示例。
下一节的警告和小心事项与这五组接口均有关,请务必遵守这些事项。
5.2 电气警告和小心事项
在设计和安装机器人应用时,务必遵循以下警告和小心事项。实施维护作业同样要
遵循这些警告和小心事项。
危险:
1. 切勿将安全信号连接到安全等级不合适的非安全型 PLC。如
不遵守该警告,可能会因某项安全停止功能失效而导致严重
受伤乃至死亡。务必将安全接口信号与普通 I/O 接口信号分
开。
2. 所有安全型信号均具备冗余性(两个独立通道)。保持两个通
道独立,可确保在发生单一故障时不会丧失安全功能。
3. 控制箱内部的某些 I/O 可配置为普通 I/O 或安全型 I/O。请
通读第 5.3节。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
I-23 UR5/CB3

5.3 控制器 I/O
危险:
1. 请确保所有不得沾水的设备都保持干燥。如果有水进入产品,
请切断电源并上锁挂牌,然后联系您的供应商。
2. 仅使用该机器人的原装电缆。请不要在那些电缆需要弯折的
应用中使用机器人。如果需要更长的电缆或柔性电缆,可以联
系您的供应商。
3. 负接头指接地 “GND” 接头,且与机器人和控制箱的防护罩相
连。本文提到的所有 GND 接头只适用于供电和传送信号。对
于保护性接地 (PE),请使用控制箱中标记接地标志的 M6 螺
丝接头。接地连接器应至少有该系统内最高电流的额定电流。
4. 当向机器人的 I/O 安装接口电缆的时候,务必小心。底部的
金属板是供接口电缆和连接器使用的。钻孔前请去掉这个金
属板。重新安装金属板前,请确保所有的毛面都已去掉。记得
使用正确尺寸的压盖。
小心:
1. 该机器人已通过国际 IEC 标准中规定的电磁兼容性检测。高
于 IEC 标准中规定电平的干扰信号将会造成机器人的异常行
为。信号电平极高或过度暴露将会对机器人造成永久性的损
害。EMC 问题通常发生在焊接过程中,通常由日志中的错误
消息提示。由 EMC 问题造成的任何损失,Universal Robots
概不负责。
2. 用于连接控制箱与其他机械和工厂设备的 I/O 电缆长度不得
超过 30 米,除非进行延长测试后表明可行。
注意:
所有电压和电流均为 DC(直流),除非另有规定。
5.3 控制器 I/O
本章说明了如何连接设备与控制箱内部的 I/O。此 I/O 极其灵活,可用于多种不同
的设备,其中包括气动继电器、PLC 和紧急停止按钮。
下图显示了控制箱内部的电气接口布局。
UR5/CB3 I-24 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。