UR5_User_Manual_zh_Global.pdf - 第51页
. . 6 维护和维修 维护维修工作务必严格遵守本手册的所有安全指示。 维护、校 准、维 修工 作必须 根据 最新 的服务 手册 进行 操作,服 务手 册可以 在支 持网 站 http://support.universal- robots.com 上 找 到。所 有 UR 经销 商 都 可以 访 问 本支 持 网站。 维修必须由授权的系统集成商或 Universal Rob ots 进行。 零件退回给 Universal Rob ot…
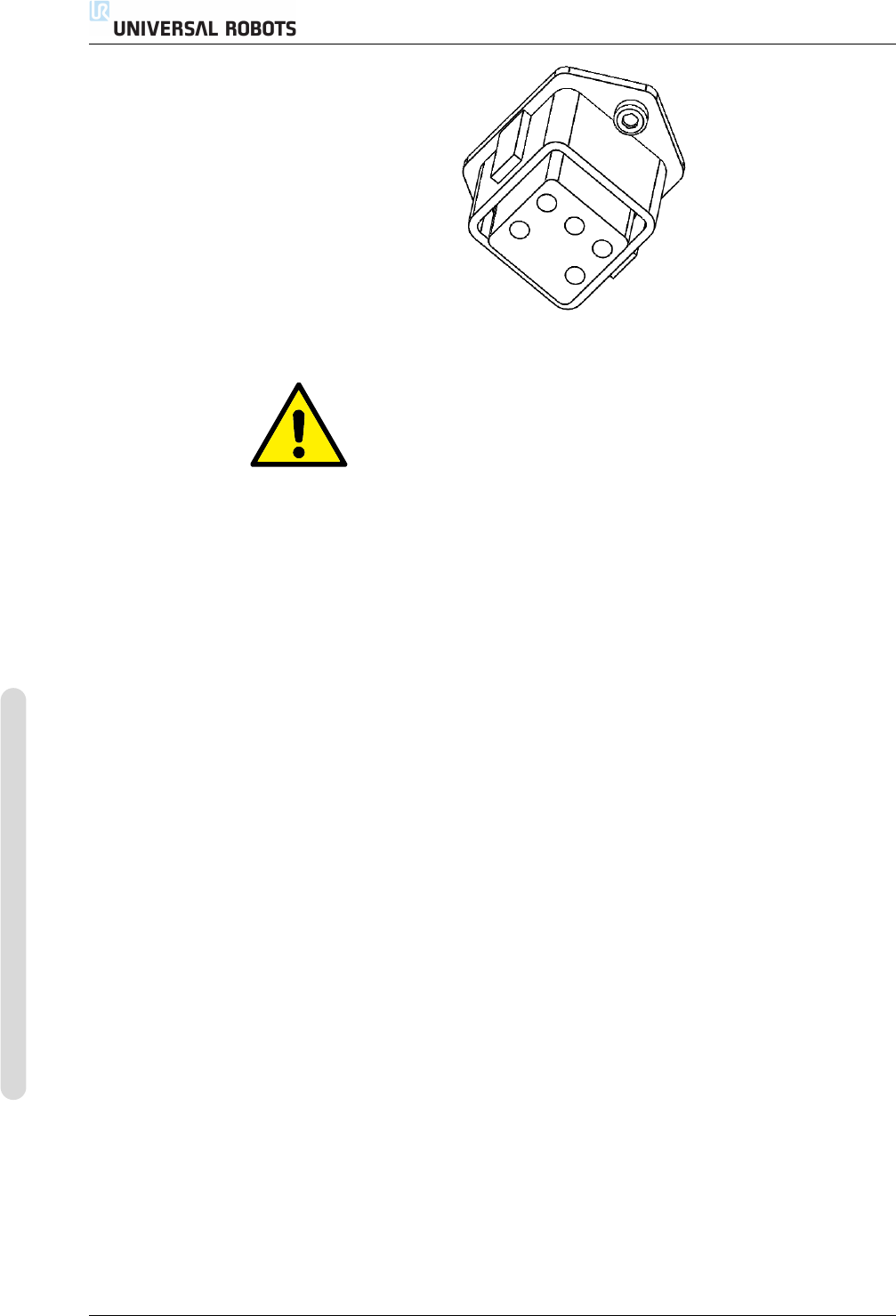
5.7 机器人连接
小心:
1. 切勿在机器人手臂开启时断开机器人电缆。
2. 切勿延长或改装原电缆。
UR5/CB3 I-38 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
.
.6 维护和维修
维护维修工作务必严格遵守本手册的所有安全指示。
维护、校准、维修工作必须根据最新的服务手册进行操作,服务手册可以在支持网
站http://support.universal-robots.com上找到。所有 UR 经销商都可以访问本支持
网站。
维修必须由授权的系统集成商或 Universal Robots 进行。
零件退回给 Universal Robots 时应按服务手册的规定进行操作。
6.1 安全指示
维护维修后,必须进行核对以确保服务要求的安全级别。核对时必须遵守有效的国
家或地方性安全法律法规。同时应检测所有安全功能是否都正常。
维护维修工作的目的是为了确保系统正常运转,或在故障状态时,帮助系统恢复正
常运转状态。维修包括故障诊断和实际的维修。
操作机器人手臂或控制箱时必须遵循以下安全程序和警告事项:
危险:
1. 不要改变软件安全配置中的任何信息(比如 力限制)。安全配
置在 PolyScope 手册中有介绍。如果安全参数变更,整个机
器人系统应被视为新系统,这就意味着所有安全审核过程,比
如风险评估,都必须更新。
2. 使用部件号相同的新部件或 Universal Robots 批准的相当部
件替换故障部件。
3. 该工作完成后立即重新激活所有禁用的安全措施。
4. 书面记录所有维修操作,并将其保存在整个机器人系统相关
的 j 技术文档中。
危险:
1. 从控制箱底部移除主输入电缆以确保其完全断电。断开机器
人手臂或控制箱连接的其他能源。采取必要的预防措施以避
免其他人在维修期间重新接通系统能源。
2. 重新开启系统前请检查接地连接。
3. 拆分机器人手臂或控制箱时请遵守 ESD 法规。
4. 避免拆分控制箱内的供电系统。控制箱关闭后其供电系统仍
可留存高压(高达 600V)达数小时。
5. 避免水或粉尘进入机器人手臂或控制箱。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
I-39 UR5/CB3
6.1 安全指示
UR5/CB3 I-40 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。