UR5_User_Manual_zh_Global.pdf - 第76页
在线预览 UR5_User_Manual_zh_Global.pdf PDF 文档。
部分 II
PolyScope 手册
.
.10 安全配置
10.1 简介
机器人有一套高级安全系统。根据机器人工作空间的特殊特征,安全系统的设置必
须在确保机器人周边的所有人员和设备安全的情况下进行配置。应用风险评估定义
的设置是集成商必须做的第一件事。有关安全系统的详情,参见 硬件安装手册。
危险:
1. 安全相关功能和界面的使用和配置必须根据集成商针对特定
机器人应用而执行的风险评估来完成,参见 硬件安装手册。
2. 设置和示教的安全配置设置必须根据集成商执行的风险评估
来应用,应在机器人手臂第一次通电之前进行。
3. 所有可以在屏幕及其子选项卡上访问的安全配置设置都必须
根据集成商执行的风险评估进行。
4. 集成商需确保所有安全配置设置的更改都是依据集成商自己
的风险评估进行的。
5. 集成商必须防止未授权人员更改安全配置,比如通过使用密
码保护。
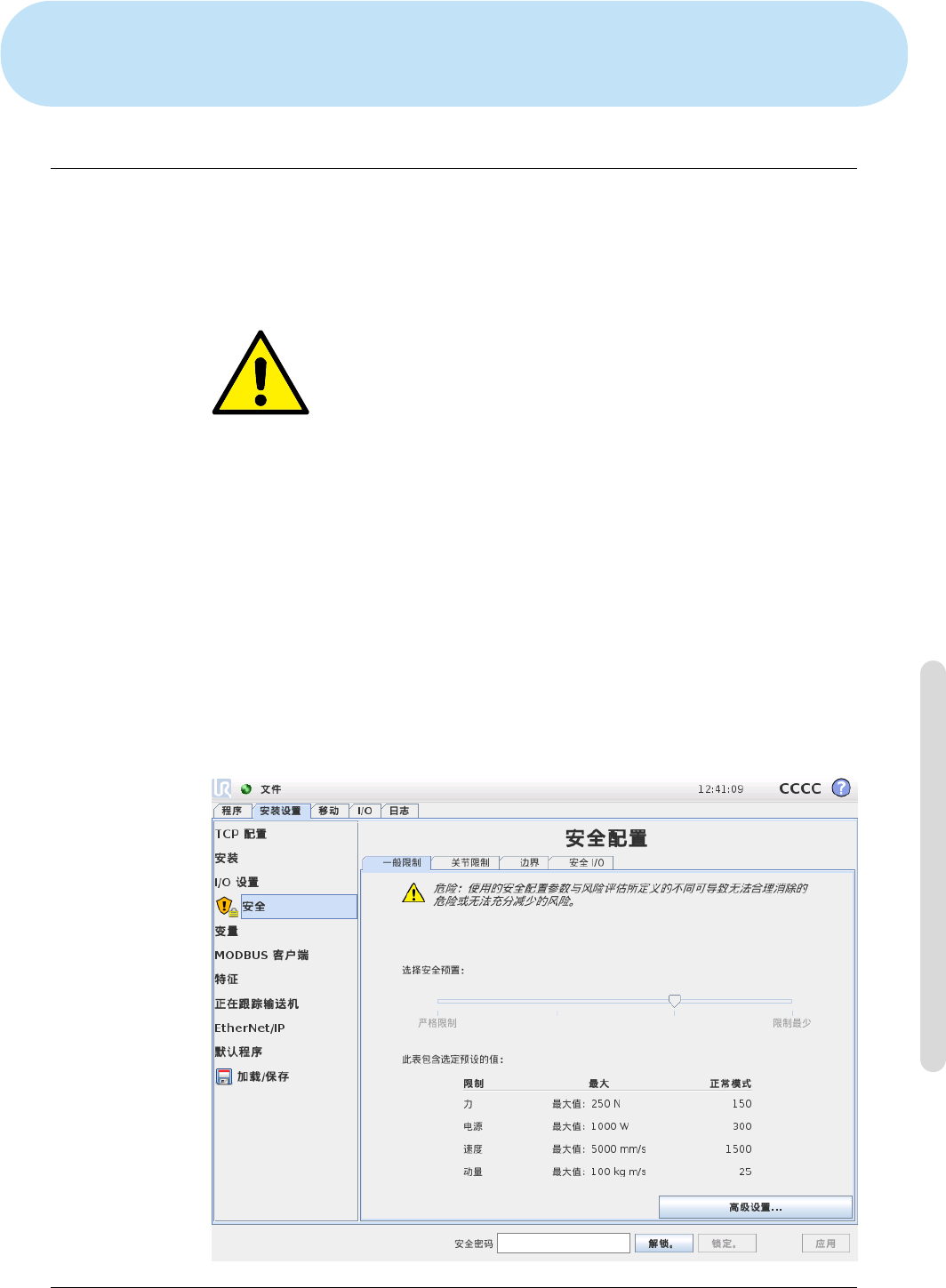
按机器人编程按钮,选择安装选项卡,并按一下安全,即可从欢迎屏幕(参见 11.4)
访问安全配置屏幕。安全配置有密码保护,请参见 10.8。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-3 CB3