UR5_User_Manual_zh_Global.pdf - 第78页
10.3 安全同步和错误 安全设 置包 含许多 用于 限制机 器人 手臂的 活动 的限制 值,还 包含许 多可 配置输 入和 输出的安全功能设置。它们的定义在安全屏幕的下列子选项卡中: • 一般限 制 子选 项卡定 义了机器 人手臂 的最大 力 、 功率 、 速 度 以及 动 量 。当机 器 人手臂击 中人或与环 境的某一 部分互撞的 风险非常 高时,这些设 置需设置 为低 值。如果风 险较低,更 高的一般限 制可使机 器人活动 得更快…
.
.10 安全配置
10.1 简介
机器人有一套高级安全系统。根据机器人工作空间的特殊特征,安全系统的设置必
须在确保机器人周边的所有人员和设备安全的情况下进行配置。应用风险评估定义
的设置是集成商必须做的第一件事。有关安全系统的详情,参见 硬件安装手册。
危险:
1. 安全相关功能和界面的使用和配置必须根据集成商针对特定
机器人应用而执行的风险评估来完成,参见 硬件安装手册。
2. 设置和示教的安全配置设置必须根据集成商执行的风险评估
来应用,应在机器人手臂第一次通电之前进行。
3. 所有可以在屏幕及其子选项卡上访问的安全配置设置都必须
根据集成商执行的风险评估进行。
4. 集成商需确保所有安全配置设置的更改都是依据集成商自己
的风险评估进行的。
5. 集成商必须防止未授权人员更改安全配置,比如通过使用密
码保护。
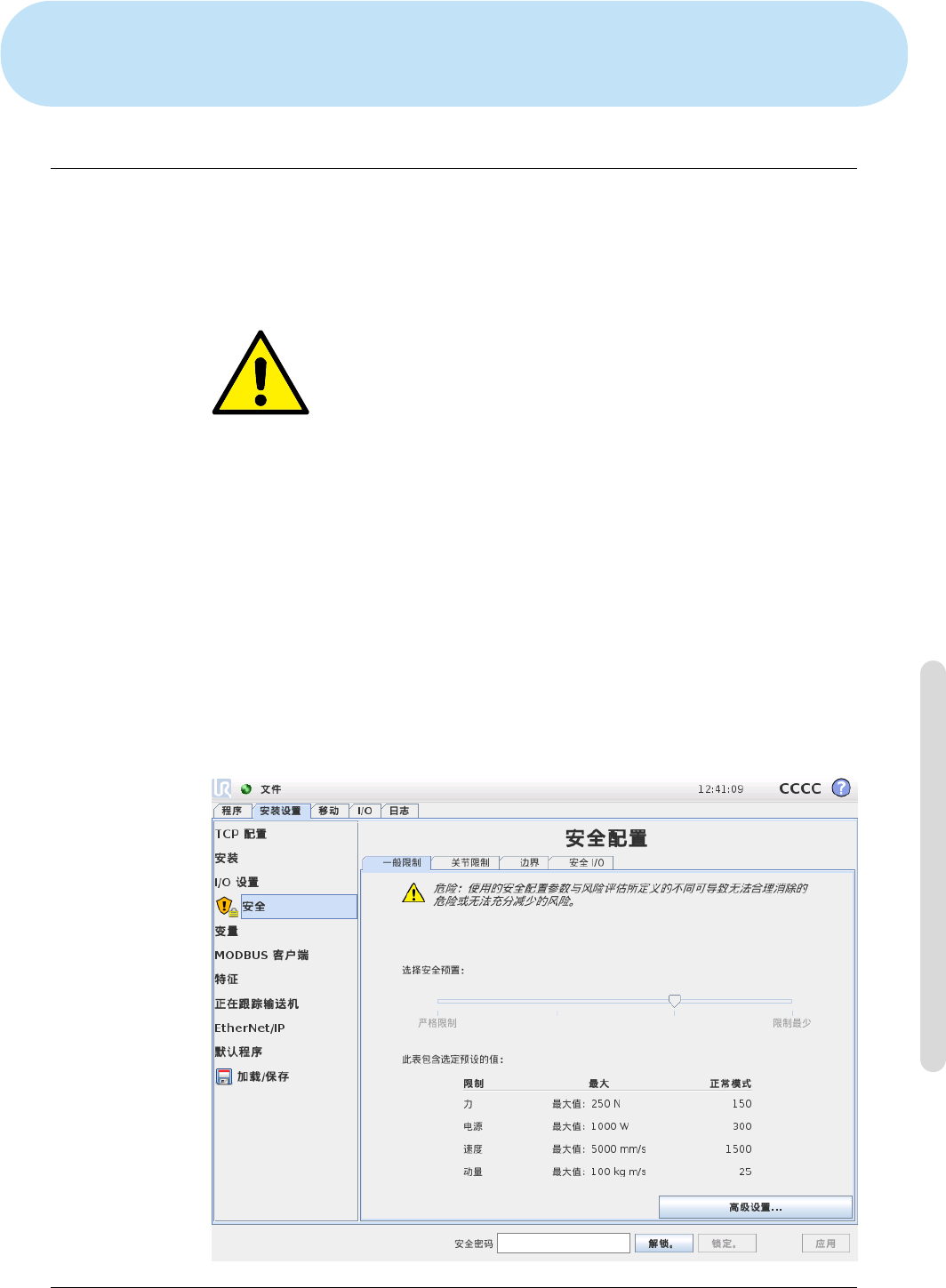
按机器人编程按钮,选择安装选项卡,并按一下安全,即可从欢迎屏幕(参见 11.4)
访问安全配置屏幕。安全配置有密码保护,请参见 10.8。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-3 CB3
10.3 安全同步和错误
安全设置包含许多用于限制机器人手臂的活动的限制值,还包含许多可配置输入和
输出的安全功能设置。它们的定义在安全屏幕的下列子选项卡中:
• 一般限制子选项卡定义了机器人手臂的最大力、功率、速度以及动量 。当机器
人手臂击中人或与环境的某一部分互撞的风险非常高时,这些设置需设置为低
值。如果风险较低,更高的一般限制可使机器人活动得更快,对环境施加更大
的力。了解更多详情,请参阅 10.10 。
• 关节限制子选项卡包括关节速度和关节位置限制。关节速度限制指的是每个
关节的最大角速度,这一限制用于进一步限制机器人手臂的速度。关节位置
限制指的是每个关节允许的位置范围(在接点空间内)。了解更多详情,请参
阅 10.11 。
• 边界子选项卡指的是机器人 TCP 的安全板(在科特尔空间内)和工具方向边
界。安全平面既可以配置为机器人 TCP 位置的硬限制,也可以配置为用于激
活缩减模式安全限制的触发器(参见 10.6)。工具方向边界为机器人 TCP 的
方向设定了一个硬限制。了解更多详情,请参阅 10.12 。
• 安全 I/O 子选项卡指的是可配置输入和输出的安全功能(请参阅 13.2)。例如,
紧急停机可配置为一个输入端。了解更多详情,请参阅 10.13 。
10.2 更改安全配置
安全配置设置只能根据集成商执行的风险评估来更改。
建议的安全配置更改程序如下:
1. 确保更改符合集成商执行的风险评估。
2. 将安全设置调整到集成商执行的风险评估所定义的适当水平。
3. 确认安全设置已应用。
4. 将下面这段话记录在操作员的手册中:“在靠近机器人作业前,确保安全配置
符合预期。这可以通过 检查 PolyScope 右上角的校验和等方式进行验证(参
见 PolyScope 手册中的 10.5)。”
10.3 安全同步和错误
所应用的安全配置的状态与 GUI 加载的机器人安装的比较,通过屏幕左侧安全文本
旁边的盾形图标表示。这些图标便于快速指示当前状态。图标的定义如下:
配置已同步: 表明 GUI 安装与当前应用的安全配置相同。没有进行过任何更
改。
配置已更改: 表明 GUI 安装与当前应用的安全配置不同。
在编辑安全配置时,盾形图标将指示您是否应用了当前设置。
如果安全选项卡中有任何文本字段包含无效输入,安全配置将处于错误状态。指示
错误状态的方式很多:
1. 屏幕左侧的安全文本旁边显示红色错误图标。
2. 包含有错误的子选项卡的顶部标有红色错误图标。
3. 包含有错误的文本字段标记为红色背景。
CB3 II-4 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
10.4 公差
如果在有错误的情况下尝试退出安装选项卡,将显示提供有如下选项的对话框:
1. 解决问题,消除所有错误。这将在屏幕左侧的安全文本旁边不再显示红色错误
图标时可见。
2. 恢复上次应用的安全配置。选择此选项将放弃所有更改,继续进行所需的操
作。
如果在没有错误的情况下退出该选项卡,将显示提供有以下选项的不同对话框:
1. 应用更改并重启系统。选择此选项将对系统应用安全配置更改并重启系统。注
意:这并不表示所有更改都已保存;此时关闭机器人将丢失包括安全配置在内
的机器人安装的所有更改。
2. 恢复上次应用的安全配置。选择此选项将放弃所有更改,继续进行所需的操
作。
10.4 公差
在安全配置中设置了物理限制。这些限制的输入字段不含公差:公差显示在字段旁
边(如适用)。 安全系统接收输入字段的值,并检测这些值是否存在违例。 机器人
手臂将力求防止安全系统违例的情况,并在发生限值减去公差的情况时停止执行程
序,以提供保护性停止。请注意,这表明程序可能无法执行极其接近极限的运动,
例如机器人可能无法达到关节速度极限或 TCP 速度极限中指定的最高速度。
警告:
务必利用限值(不含公差)执行风险评估。
警告:
公差视软件版本而定,因此更新软件可能会改变公差。有关版本之
间的变化,请参考发布说明。
10.5 安全校验和
屏幕右上角的文本简略地展示了当前机器人所使用的安全配置。文本的变更意味着
当前的安全配置也发生了变化。点击校验和将显示当前有效的安全配置的详细信
息。
10.6 安全模式
在正常条件(即 没有实施保护性停止)下,安全系统将在如下的一种安全模式下操
作,每种模式都有关联的安全极限设置:
正常模式: 默认为激活的安全模式;
缩减模式: 机器人 TCP 的位置超出触发器缩减模式平面(参见 10.12),或使用可
配置的输入触发(参见 10.13)时,将激活此模式。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-5 CB3