UR5_User_Manual_zh_Global.pdf - 第89页
10.13 安全 I/O 禁用 工具边界限制从不激活。 标准 安全系统位于 标准 模式下时,工具边界限制激活。 缩减 安全系统位于 缩减 模式下时,工具边界限制激活。 标准和缩减 安 全 系 统 位 于 标 准 或 缩 减 模 式 下 时, 工 具 边 界 限 制激活。 被选的 安全模 式 由 安全边界 控件的 相应的条目里的 图标表明。如果 安 全模式 被设置 为 禁用 ,没有任何图标显示。 效 果 工 具 方 向 的 偏 差 即 将…
10.12 边界
如果预测的轨迹将是使机器人 TCP 穿过触发器缩减模式平面,在即将超过关节速
度、工具速度或新限制设置中动量极限的情况下,机器人手臂将在穿过此平面前就
开始减速。请注意,由于这些限制在缩减模式限制设置中需要提供更严格的限制,
因此只有在从标准模式向缩减模式转换时才发生过早减速的情况。
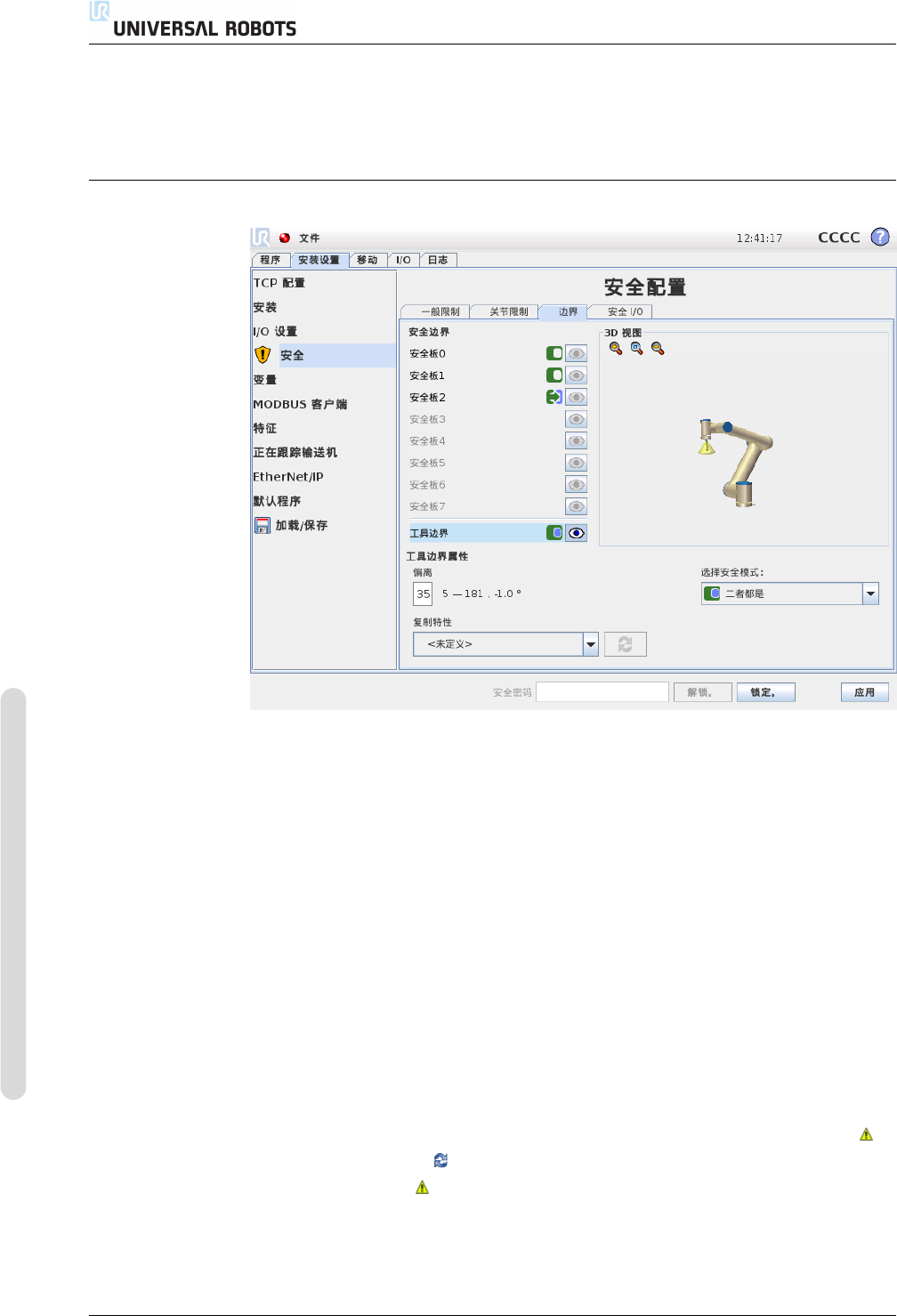
10.12.4 工具边界属性
位于选项卡底部的工具边界属性面板定义了机器人工具方向的限度,该限度由理想的
工具方向和该方向的最大允许偏离值组成。
偏离 偏离文本域表示机器人工具的最大允许偏离与理想的方向的偏差值。更改偏
差值的方法是点击文本域,然后输入一个新的值。
可接受的数值范围以及偏离量的公差和单位在文本域旁边列出。
复制特性 使用当前机器人安装的一种属性来(请参见 13.12)规定机器人工具理
想的方向。被选属性的 z-轴会作为该极限的理想的工具方向矢量。
请使用工具边界属性控件左下部的下拉列表框选择一种属性。只能使用点和平面类型
的特征。选择 <Undefined> 选项来明确安全板的配置。
需注意当选择一种属性对安全板进行配置之后,方向信息只是复制到该极限;该极
限没有与该属性相连。这就是说如果用于配置安全板的属性的的位置或方向发生变
化,该安全板并不会自动更新。如果属性发生变化,属性选择器上方就会显示 图
标。点击选择器旁边的 按钮,更新安全板当前的方向属性。如果将被选属性从配
置中删除,就会显示 图标。
安全模式 工具边界属性面板右侧的下拉菜单用于选择此工具方向边界的安全模式。
可选项如下:
CB3 II-14 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
10.13 安全 I/O
禁用 工具边界限制从不激活。
标准 安全系统位于标准模式下时,工具边界限制激活。
缩减 安全系统位于缩减模式下时,工具边界限制激活。
标准和缩减 安全系统位于标准或缩减模式下时,工具边界限
制激活。
被选的安全模式由安全边界 控件的相应的条目里的图标表明。如果安全模式 被设置
为禁用,没有任何图标显示。
效果 工具方向的偏差即将超过输入的最大偏差时,如果继续沿预测的轨迹移动,
则公差为负(参阅 10.4)。请注意,公差值所示的负号只是用于表明要从实际输入
的值中减去公差。如果工具方向的偏差超过限制(无公差),安全系统将实施 0 类
停机。
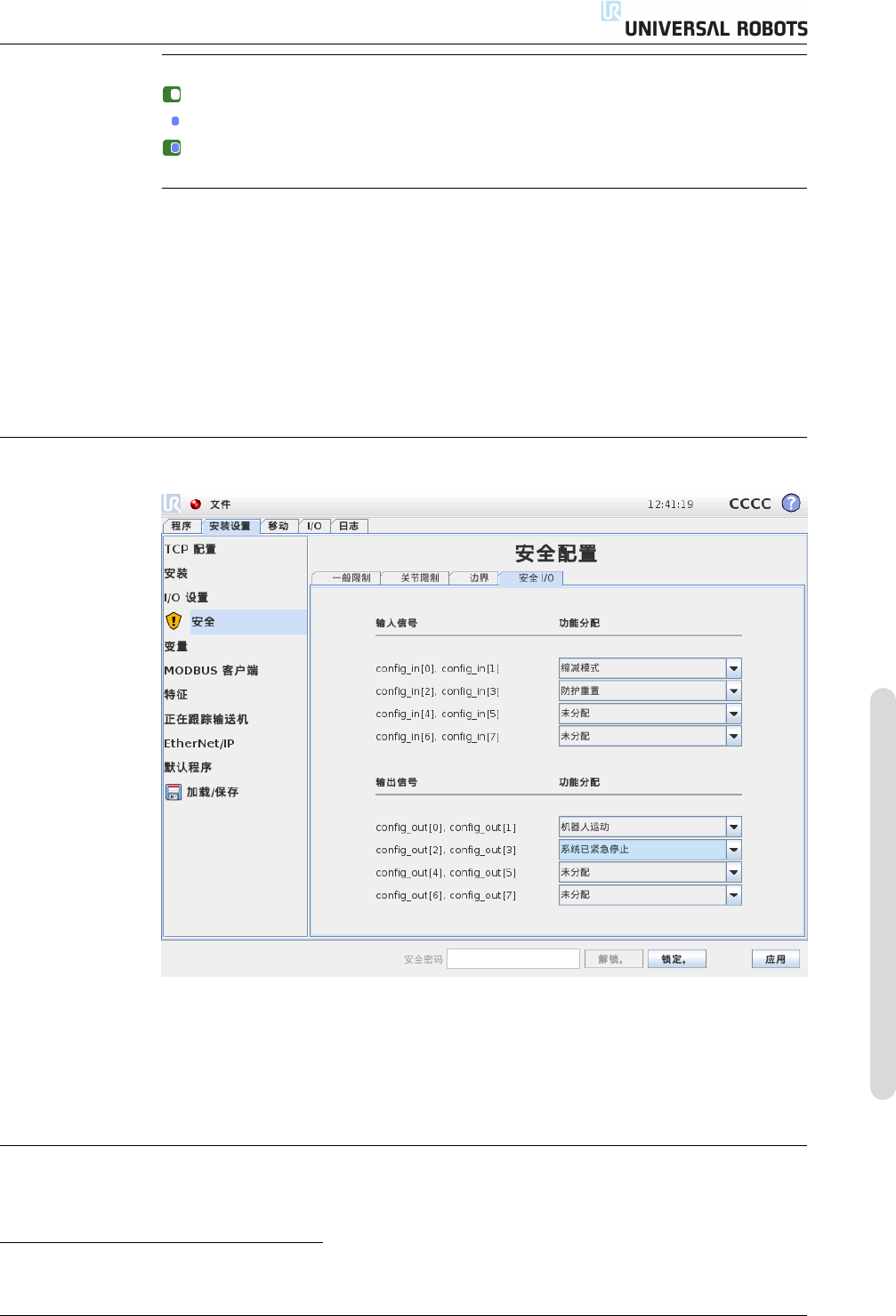
10.13 安全 I/O
此屏幕定义了可配置输入和输出 (I/O) 的安全功能 。输入端与输出端之间的 I/O
是分开的,并且成对出现以便每个功能提供一个类别
2
3 和 PLd I/O。
每项安全功能只能控制一对 I/O。尝试再次选择相同的安全功能会将其从之前定义
的第一对 I/O 中移除。输入信号有 5 种安全功能,输出信号有 4 种。
10.13.1 输入信号
对于输入信号,可以选择下述安全功能:紧急停机、缩减模式、防护重置、3 档位开关
和操作模式。
2
根据 ISO 13849-1,参见术语表了解详情。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-15 CB3
10.13 安全 I/O
紧急停机 当选定时,除示教盒上的紧急停机按钮外会增加一个紧急停机按钮。只要
与符合 ISO 13850:2006 标准的设备相连接,便可以提供与示教盒上的紧急停止按钮
相同的功能。
缩减模式 所有安全限制有两种可以应用的模式:标准模式,此模式指定默认的安
全配置;和缩减模式(详情参见 10.6)。如选择此项输入安全功能,向输入提供的低
信号将导致安全系统转变为缩减模式。必要时,机器人手臂将减速,以符合缩减模
式限制设置。如果机器人手臂仍然违反任何缩减模式限制,将实施 0 类停机。向标
准模式转换的方式与此相同。请注意,安全平面同样可能导致向缩减模式转换(详
情参见 10.12.3)。
防护重置 如果在安全 I/O 中进行了防护停止的布线,将利用此输入以保证在触发
重置前保持 “防护停止” 状态。在防护停止状态下,机器人手臂不会移动。
警告:
默认为对引脚 0 和引脚 1 配置防护重置输入功能。禁用防护重置意
味着只要 “防护停止” 变高,机器人手臂将停止在 “防护停止” 位
置。换言之,防护重置输入、防护停止输入 SI0 和 SI1(参见硬件安
装手册)充分确定了防护停止状态是否激活。
3 档位开关和操作模式 允许在机器人的设置和编程过程中选择使用 3 档位设备作为
一个附加防护措施。配置 3 档位开关输入之后,机器人将处于 “运行模式” 或 “编程
模式”。一个图标将出现在右上角以显示当前的操作模式:
运行模式:机器人只能执行预定义的任务。“移动” 选项卡和 “自由驱动” 模式
不可用。
编程模式:运行模式中提出的限制出现。但是,当 3 档位开关输入为低信号时,
机器人处于防护停止状态。此外,速度滑块被设在对应于 250
mm
/s 的初始值,
可逐渐增大以达到更高的速度。当 3 档位开关输入信号由低变高时,速度滑块
被重置为低值。
配置操作模式选择有两种方法::
1. 要使用外部模式选择设备选择操作模式,配置操作模式输入。一旦配置了 3 档
位开关输入,配置选项将出现在下拉菜单中。当操作模式输入信号较低时,机器
人将处于运行模式,当较高时,机器人处于编程模式。
2. 要从 Polyscope 选择操作模式,只有 3 档位开关输入必须配置并应用到安全配
置。在这种情况下,默认模式为运行。如要切换到编程模式,在欢迎屏幕上选
择 “给机器人编程” 按钮。如要回到运行模式,只需退出 “给机器人编程” 屏
幕。
注意:
当安全 I/O 配置及 3 档位开关启用被确认后,欢迎屏幕自动显示。
当操作模式从编程变为运行时,欢迎屏幕也会自动显示。
CB3 II-16 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。