UR5_User_Manual_zh_Global.pdf - 第90页
10.13 安全 I/O 紧急停机 当 选定时,除示 教盒上的 紧急停机按 钮外会增 加一个 紧急 停机 按钮。只 要 与符合 ISO 13850:2006 标准 的设 备相连 接,便可 以提供 与示 教盒上 的 紧急 停止 按钮 相同的功能。 缩 减模 式 所 有 安 全 限 制有 两 种 可 以 应 用的 模 式: 标 准 模式, 此 模 式 指 定默 认 的 安 全配置; 和 缩减 模式(详情参见 10.6 ) 。 如选择此项输入…
10.13 安全 I/O
禁用 工具边界限制从不激活。
标准 安全系统位于标准模式下时,工具边界限制激活。
缩减 安全系统位于缩减模式下时,工具边界限制激活。
标准和缩减 安全系统位于标准或缩减模式下时,工具边界限
制激活。
被选的安全模式由安全边界 控件的相应的条目里的图标表明。如果安全模式 被设置
为禁用,没有任何图标显示。
效果 工具方向的偏差即将超过输入的最大偏差时,如果继续沿预测的轨迹移动,
则公差为负(参阅 10.4)。请注意,公差值所示的负号只是用于表明要从实际输入
的值中减去公差。如果工具方向的偏差超过限制(无公差),安全系统将实施 0 类
停机。
10.13 安全 I/O
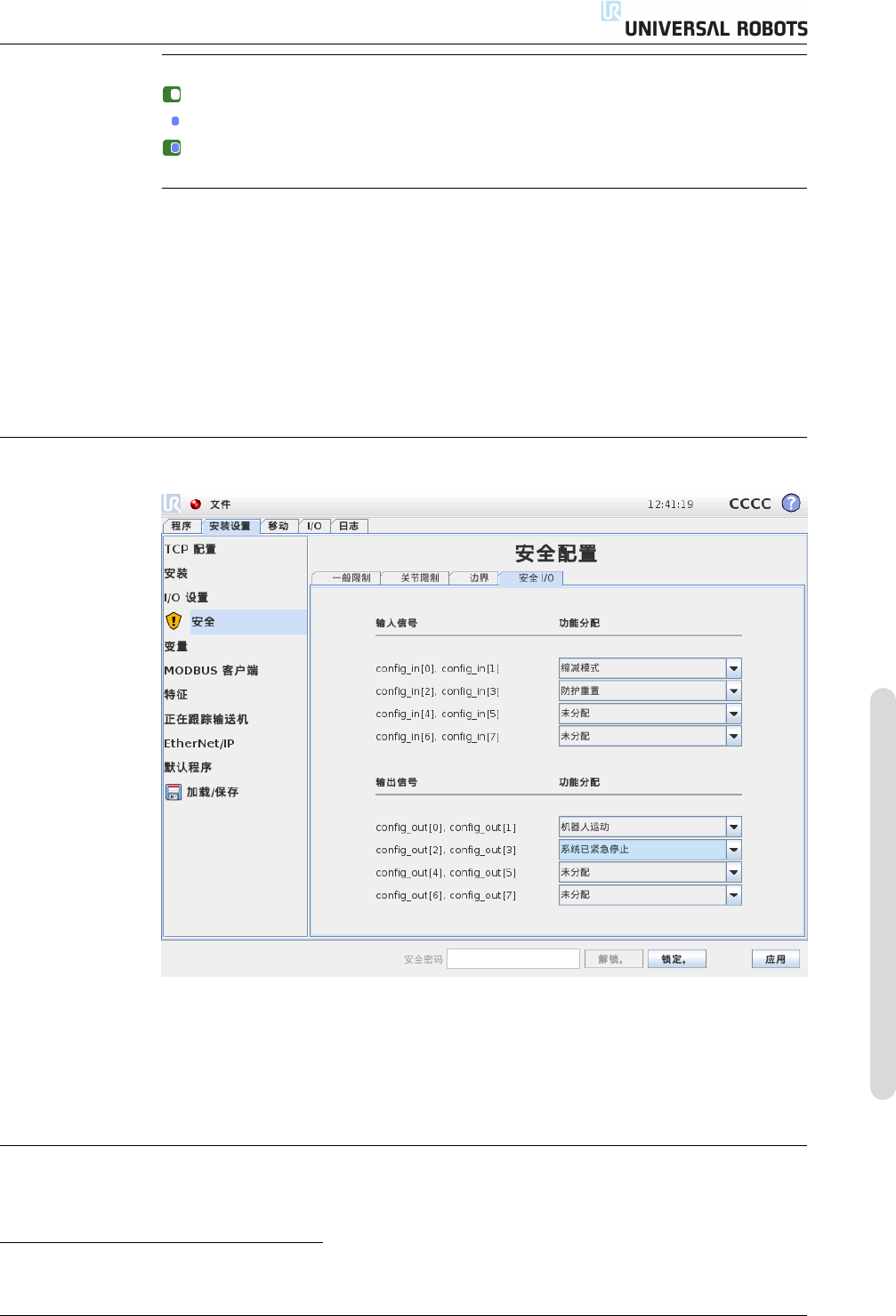
此屏幕定义了可配置输入和输出 (I/O) 的安全功能 。输入端与输出端之间的 I/O
是分开的,并且成对出现以便每个功能提供一个类别
2
3 和 PLd I/O。
每项安全功能只能控制一对 I/O。尝试再次选择相同的安全功能会将其从之前定义
的第一对 I/O 中移除。输入信号有 5 种安全功能,输出信号有 4 种。
10.13.1 输入信号
对于输入信号,可以选择下述安全功能:紧急停机、缩减模式、防护重置、3 档位开关
和操作模式。
2
根据 ISO 13849-1,参见术语表了解详情。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-15 CB3
10.13 安全 I/O
紧急停机 当选定时,除示教盒上的紧急停机按钮外会增加一个紧急停机按钮。只要
与符合 ISO 13850:2006 标准的设备相连接,便可以提供与示教盒上的紧急停止按钮
相同的功能。
缩减模式 所有安全限制有两种可以应用的模式:标准模式,此模式指定默认的安
全配置;和缩减模式(详情参见 10.6)。如选择此项输入安全功能,向输入提供的低
信号将导致安全系统转变为缩减模式。必要时,机器人手臂将减速,以符合缩减模
式限制设置。如果机器人手臂仍然违反任何缩减模式限制,将实施 0 类停机。向标
准模式转换的方式与此相同。请注意,安全平面同样可能导致向缩减模式转换(详
情参见 10.12.3)。
防护重置 如果在安全 I/O 中进行了防护停止的布线,将利用此输入以保证在触发
重置前保持 “防护停止” 状态。在防护停止状态下,机器人手臂不会移动。
警告:
默认为对引脚 0 和引脚 1 配置防护重置输入功能。禁用防护重置意
味着只要 “防护停止” 变高,机器人手臂将停止在 “防护停止” 位
置。换言之,防护重置输入、防护停止输入 SI0 和 SI1(参见硬件安
装手册)充分确定了防护停止状态是否激活。
3 档位开关和操作模式 允许在机器人的设置和编程过程中选择使用 3 档位设备作为
一个附加防护措施。配置 3 档位开关输入之后,机器人将处于 “运行模式” 或 “编程
模式”。一个图标将出现在右上角以显示当前的操作模式:
运行模式:机器人只能执行预定义的任务。“移动” 选项卡和 “自由驱动” 模式
不可用。
编程模式:运行模式中提出的限制出现。但是,当 3 档位开关输入为低信号时,
机器人处于防护停止状态。此外,速度滑块被设在对应于 250
mm
/s 的初始值,
可逐渐增大以达到更高的速度。当 3 档位开关输入信号由低变高时,速度滑块
被重置为低值。
配置操作模式选择有两种方法::
1. 要使用外部模式选择设备选择操作模式,配置操作模式输入。一旦配置了 3 档
位开关输入,配置选项将出现在下拉菜单中。当操作模式输入信号较低时,机器
人将处于运行模式,当较高时,机器人处于编程模式。
2. 要从 Polyscope 选择操作模式,只有 3 档位开关输入必须配置并应用到安全配
置。在这种情况下,默认模式为运行。如要切换到编程模式,在欢迎屏幕上选
择 “给机器人编程” 按钮。如要回到运行模式,只需退出 “给机器人编程” 屏
幕。
注意:
当安全 I/O 配置及 3 档位开关启用被确认后,欢迎屏幕自动显示。
当操作模式从编程变为运行时,欢迎屏幕也会自动显示。
CB3 II-16 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。

10.13 安全 I/O
10.13.2 输出信号
对于输出信号,可以选择下述安全功能:触发强信号的状态结束时,所有信号回复
弱状态:
系统紧急停止 如果安全系统触发进入紧急停止状态,则给出弱信号。否则就给出强
信号。
机器人运动 只要机器人手臂在移动状态就给出弱信号。机器人手臂处于固定位置
时,给出强信号。
机器人未停止 如果机器人手臂被要求停止,指令发出到手臂停止需要一定时间。这
期间信号将处于强状态。机器人手臂在移动状态,且没有被要求停止,又或者机器
人手臂处于停止状态,信号将处于弱状态。
缩减模式 当机器人手臂处于缩减模式,或利用缩减模式输入配置了安全输入且当前
信号低时,将发送低信号。否则信号处于强状态。
未缩减模式 这是上述缩减模式的相反状态。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-17 CB3