UR5_User_Manual_zh_Global.pdf - 第92页
10.13 安全 I/O CB3 I I-18 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015 Universal Robots A/S 。保留所有权利。

10.13 安全 I/O
10.13.2 输出信号
对于输出信号,可以选择下述安全功能:触发强信号的状态结束时,所有信号回复
弱状态:
系统紧急停止 如果安全系统触发进入紧急停止状态,则给出弱信号。否则就给出强
信号。
机器人运动 只要机器人手臂在移动状态就给出弱信号。机器人手臂处于固定位置
时,给出强信号。
机器人未停止 如果机器人手臂被要求停止,指令发出到手臂停止需要一定时间。这
期间信号将处于强状态。机器人手臂在移动状态,且没有被要求停止,又或者机器
人手臂处于停止状态,信号将处于弱状态。
缩减模式 当机器人手臂处于缩减模式,或利用缩减模式输入配置了安全输入且当前
信号低时,将发送低信号。否则信号处于强状态。
未缩减模式 这是上述缩减模式的相反状态。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-17 CB3
10.13 安全 I/O
CB3 II-18 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
.
.11 开始编程
11.1 简介
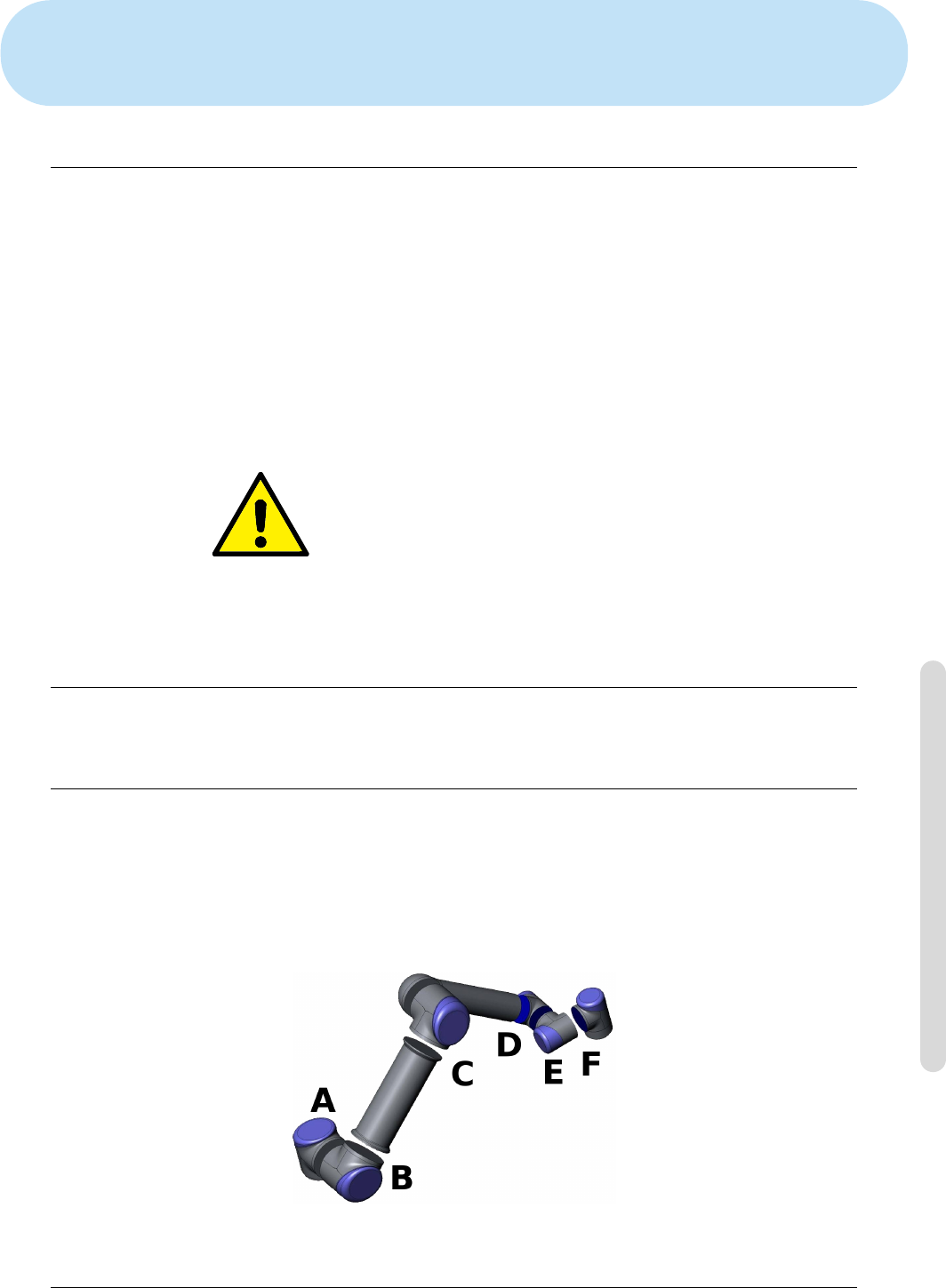
UR 机器人手臂由挤压铝管和关节组成。这些关节及其通用的名字如表格 11.1所
示。 机座是机器人的安装位置,机器人的另一端(手腕 3)与机器人的工具相连。
通过协调每一个关节的活动,除了机座正上方及正下方的区域以外,机器人可以自
由地移动工具。
PolyScope 是一个图形用户界面(GUI),你可以操作机器人手臂和控制箱,执行机
器人程序,也可以很轻松地创建一个新的程序。
下一节介绍机器人入门知识。之后将对屏幕及 PolyScope 的功能做更加详尽的介
绍。
危险:
1. 硬件安装手册包含重要的安全信息,在机器人第一次通电前,
UR 机器人的集成商必须阅读并理解这些信息。
2. 在机器人手臂第一次通电前,集成商必须设置风险评估定义
的安全配置参数,参见 10。
11.2 使用入门
使用 PolyScope 之前,必须先安装机器人手臂和控制箱,将控制箱接通电源。
11.2.1 安装机器人手臂和控制箱
请按照以下步骤安装机器人手臂和控制箱:
1. 开箱取出机器人手臂和控制箱。
图 11.1: 机器人关节 A:机座,B:肩膀,C:手肘 和 D、E、F:手腕 1、2、3
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-19 CB3