UR5_User_Manual_zh_Global.pdf - 第96页
11.3 PolyScope 程序界面 警告 : 1. 不 要 让 机 器 人 移 到 自 身 或 其 他 物 体 中, 因 为 这 会 对 机 器 人 造 成损害。 2. 您的 头 和躯 干 不能 位于 机 器人 可接 触 到的 范 围(工 作区) 。 请 不要将您的手指放在机器人可抓住的地方。 3. 这只是一个快速启动指南,教您如何轻松地使用 UR 机器人。 该 指 南 的 前 提 是 环 境 安 全 无 害, 用 户 谨 慎 小 …
11.2 使用入门
7. 解锁紧急停机按钮。机器人状态从紧急停机变成关闭电源。
8. 请站在机器人可触及的范围(工作空间)之外。
9. 触摸触摸屏上的开按钮。等待几秒钟,直至机器人状态变成空闲。
10. 请确认有效荷载和所选的安装正确。如果基于传感数据的安装与所选的安装不
一致,将有提示出现。
11. 触摸触摸屏上的启动按钮。此时,制动器即会解锁,机器人会发出噪音并移动
少许位置。
12. 触摸确定按钮,转至欢迎屏幕。
11.2.5 第一个程序
程序是指示机器人操作的一系列命令。借助于 PolyScope 软件,操作人员只需具备
少量编程经验即可对机器人进行编程。对于大多数任务,整个编程过程使用触摸屏
即可完成,无需键入任何晦涩难懂的命令。
因为工具运动是机器人程序中非常重要的一部分,因此,机器人运动示教方式必不
可少。在 PolyScope 软件中,工具运动由一系列路点,即机器人工作空间内的 点确
定。路点可通过将机器人移至某个具体位置来确定,或由软件计算得出。为了将机
器人手臂移至某个具体位置,既可以使用移动按钮(请参阅 13.1),也可以简单地
在按住示教板后侧的自由驱动按钮的同时,将机器人手臂拉到该具体位置。
除了移动通过路点外,程序还可在机器人路径中的特定点处向其他机器发送 I/O 信
号,并可根据变量和 I/O 信号执行 if. . . then 和 loop 等命令。
在机器人上创建一个已启动的简单程序,请按如下操作:
1. 触摸机器人程序按钮,选择清空程序按钮。
2. 触摸下一步按钮(右下角),屏幕左侧树结构中 <empty> 行将被选中。
3. 转至结构选项卡。
4. 触摸移动按钮。
5. 转至命令选项卡。
6. 按下一步按钮,转至路点设置。
7. 按 “?” 图片旁的设置此路点按钮。
8. 在移动屏幕上,按各个蓝色箭头以移动机器人,或者在按住位于示教盒背面的
自由驱动按钮的同时拉动机器人手臂。
9. 按确定。
10. 按在其前添加路点。
11. 按 “?” 图片旁的设置此路点按钮。
12. 在移动屏幕上,按各个蓝色箭头以移动机器人,或者在按住自由驱动按钮的同
时拉动机器人手臂。
13. 按确定。
14. 您的程序已就绪。按 “播放” 符号后,机器人将在两点之间移动。站在离开机
器人的位置,按住紧急停机按钮并按 “播放”。
15. 恭喜!您现已编完了您的第一个机器人程序,该程序可指示机器人在给定的两
点之间移动。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-21 CB3
11.3 PolyScope 程序界面
警告:
1. 不要让机器人移到自身或其他物体中,因为这会对机器人造
成损害。
2. 您的头和躯干不能位于机器人可接触到的范围(工作区)。请
不要将您的手指放在机器人可抓住的地方。
3. 这只是一个快速启动指南,教您如何轻松地使用 UR 机器人。
该指南的前提是环境安全无害,用户谨慎小心。请不要将速
度或者加速度上调至默认值之上。在使机器人进入操作之前,
始终进行风险评估。
11.3 PolyScope 程序界面
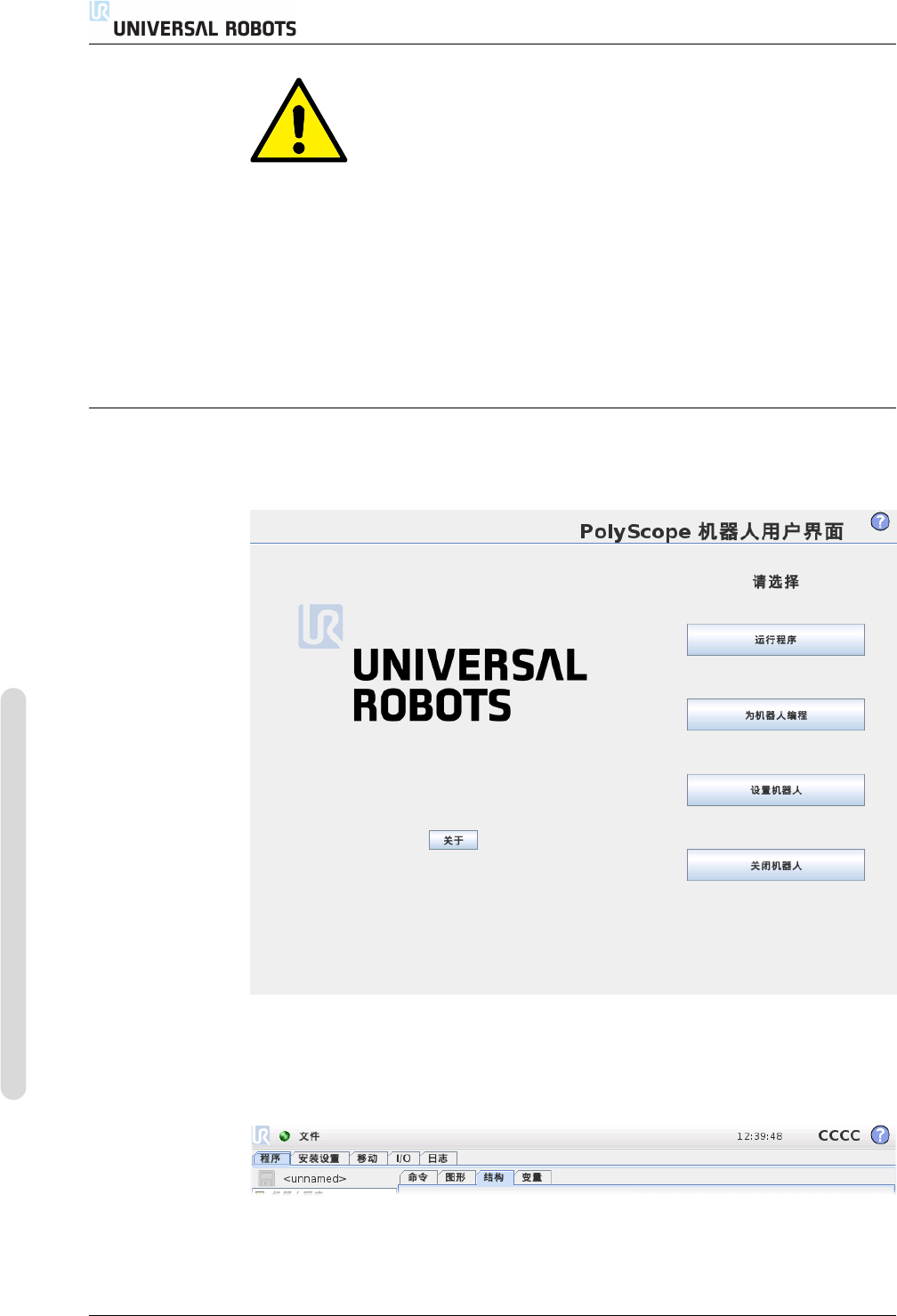
PolyScope 在连接到控制箱的触摸屏上运行。
上图显示的是 “欢迎” 屏幕。屏幕浅蓝区域的按钮可通过手指触摸或笔端触碰来操
作。PolyScope 以层级结构的形式来组织各个屏幕画面。在编程环境中,屏幕以选
项卡的形式组织排列以便于访问。
在上图的示例中,用户选择了顶层的程序选项卡以及位于其下一层的结构选项卡。
程序选项卡显示与当前加载程序相关的信息。若选择移动选项卡,屏幕将切换为移
CB3 II-22 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
11.4 欢迎屏幕
动屏幕,在此屏幕中可以移动机器人手臂。同理,若选择 I/O 选项卡,可以监控和
更改电气 I/O 的当前状态。
控制箱或示教盒也可以连接鼠标和键盘,不过,实际上无此必要。几乎所有文本字
段都启用了触控功能,因此触摸它们可以打开一个屏幕小键盘或键盘。不可触控的
文本字段旁会有一个编辑器图标,可以打开相关的输入编辑器。
屏幕小键盘、键盘和表达式编辑器图标如上图所示。
有关 PolyScope 的各个屏幕,将在后续章节详细介绍。
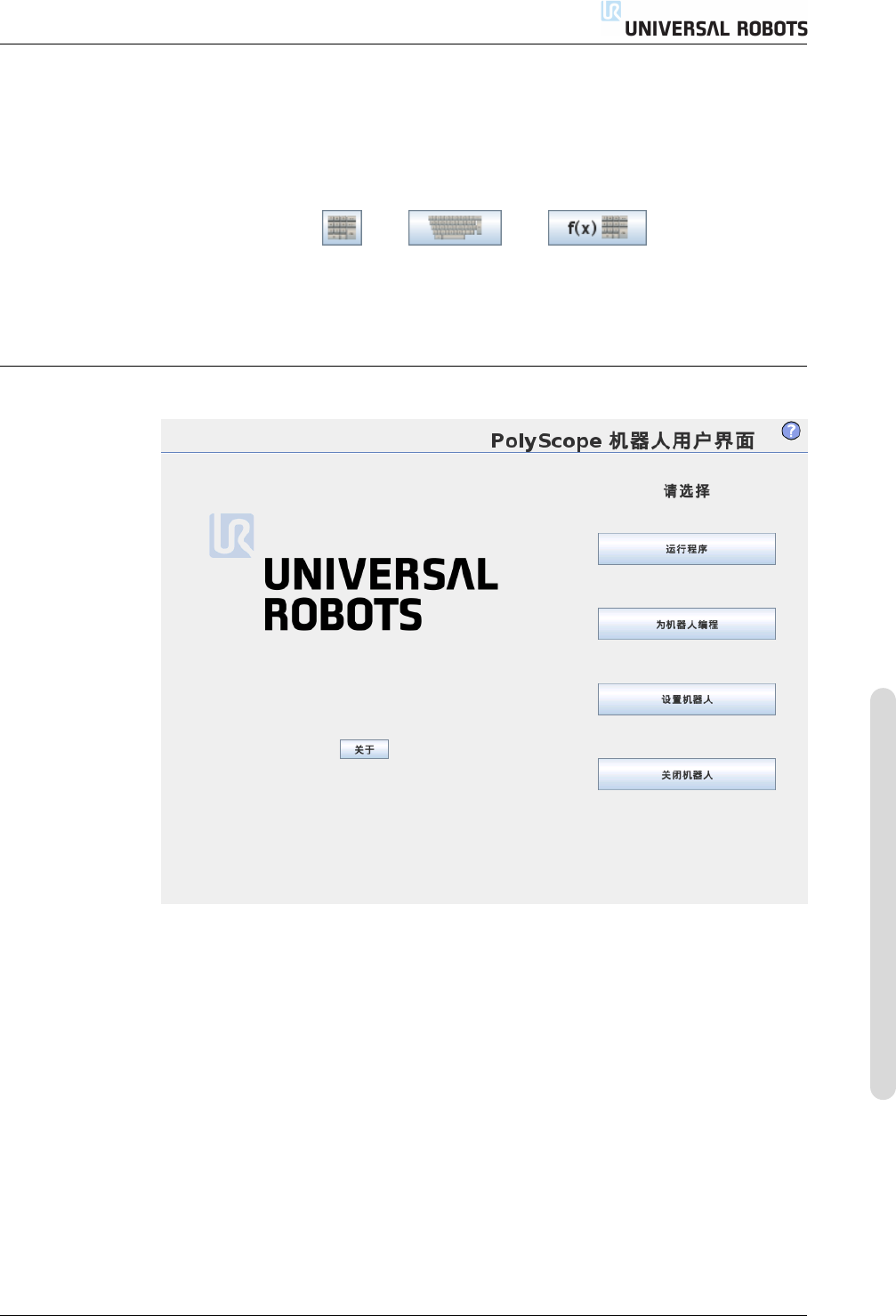
11.4 欢迎屏幕
启动控制器 PC 后,将显示欢迎屏幕。此屏幕提供以下选项:
• 运行程序:选择并运行已有程序。这是操作机器人手臂和控制箱最便捷的方
式。
• 为机器人编程:修改程序或创建新程序。
• 设置机器人:更改语言、设置密码、升级软件等
• 关闭机器人:关闭机器人手臂的电源,关闭控制箱。
• 关于:提供有关软件版本的详情、主机名、IP 地址、序列号和法律信息。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-23 CB3