KE-3010A_机器控制参数.pdf - 第58页
机器控制参数 2- 49 2-3-2-2 传送马达种类 2-3-2-3 速度区分 No. 类别 内容 1 0 IN_MOTOR 2 1 CENTER_MOTOR 3 2 OUT_MOTOR No. 类别 内容 1 0 高速 2 1 中速 3 2 低速 4 3 预备 5 4 预备 6 5 预备送料( 56mm/sec ) 7 6 预备送料( 16mm/sec ) 8 7 ~ 9 预备
机器控制参数
2-48
2-3-2
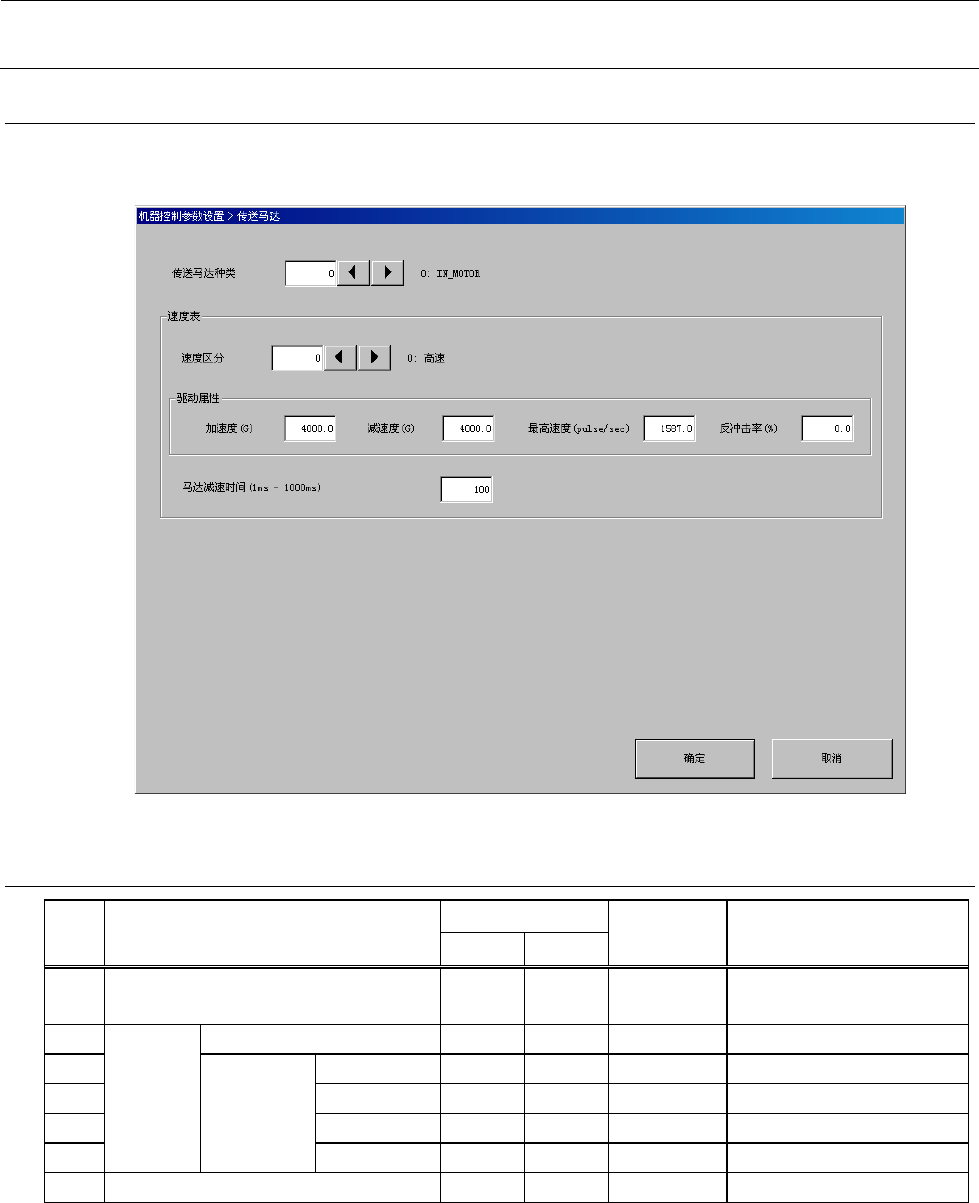
传送马达
如将“传送马达种类”设置为欲编辑的索引,即可对所设置的区分的速度表进行编辑。
并且,如将速度表的速度区分设置为欲编辑的索引,即可对所设置的区分的驱动属性进行编辑。
2-3-2-1
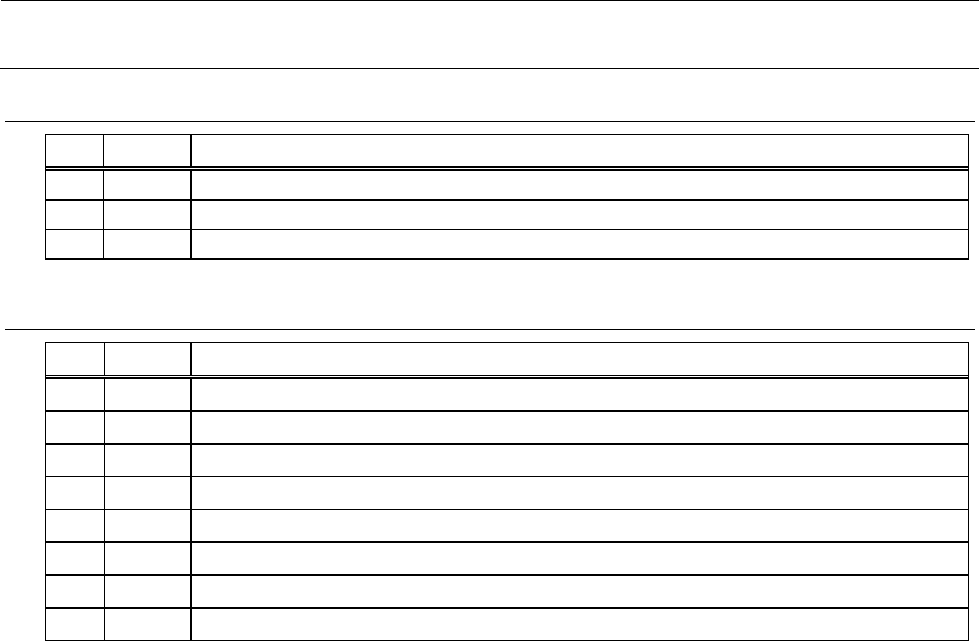
设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1
传送马达种类
0
2
参照
2-3-2-2
传送马达种
类
2
速度表
速度区分
0
9
参照
2-3-2-3
速度区分
3
驱动属性
加速度
G
4
减速度
G
5
最高速度
Pulse/sec
6
反冲击率
%
7
马达减速时间
1
1000
ms
机器控制参数
2-49
2-3-2-2
传送马达种类
2-3-2-3
速度区分
No.
类别
内容
1
0
IN_MOTOR
2
1
CENTER_MOTOR
3
2
OUT_MOTOR
No.
类别
内容
1
0
高速
2 1
中速
3 2
低速
4
3
预备
5 4
预备
6
5
预备送料(
56mm/sec
)
7 6
预备送料(16mm/sec)
8
7~9 预备
机器控制参数
2-50
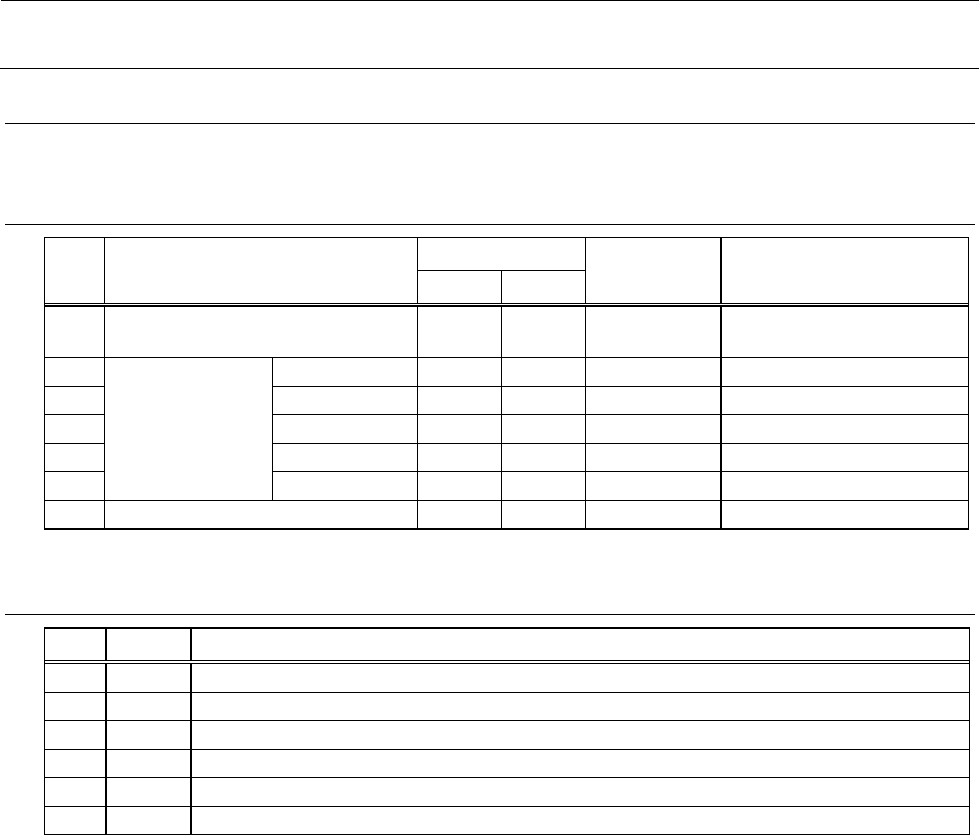
2-3-3 AWC
马达
如将驱动属性内的“动作区分”设置为欲编辑的索引,即可对所设置的区分之“加速度”、“减速度”、
“最高速度”、“反冲击率”进行编辑。
2-3-3-1
设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1 脉冲移动量 0 2
0.1µm/Puls
e
2
驱动属性
动作区分
0
9
参照
2-3-3-2
动作区分
3
加速度
G
4
减速度
G
5
最高速度
Pulse/sec
6
反冲击率
%
7
定位精度
2-3-3-2
动作区分
No.
类别
内容
1
0
PTP
动作
2
1
OG
基础属性
3
2
单步
4
3
返回原点(查找
HOME
)
5
4
返回原点(查找
Z
相)
6
5
~
9
预备