3MAINTENANCE__O.pdf - 第104页
3.4 Device Test ⑥ When the [ FORWARD ] or [ REVERSE ] key located under the label “ NOZZLE ROTATE N 1 JOG ” is selected and the [ MOVE ] button is pressed , angle of the component can be jogged . ( 6 ) Test ID data can b…
3.4
Device
Test
③
Component
recognition
function
is
implemented
.
Note
:
The
[
PAUSE
]
button
is
valid
during
the
above
-
described
operation
.
•
When
the
[
MOVE
TO
PLACEMENT
STATION
]
key
is
selected
and
the
[
MOVE
]
button
is
pressed
,
the
following
action
takes
place
.
①
The
vacuum
nozzle
on
the
specified
head
No
.
moves
to
the
pick
-
up
position
and
stops
.
Let
the
nozzle
pick
up
a
component
by
hand
.
•
When
the
[
MOVE
TO
RECOG
.
STATION
]
key
is
selected
and
the
[
MOVE
]
button
is
pressed
,
the
following
action
takes
place
.
②
The
head
which
picked
up
a
component
recognition
station
and
stops
.
Note
:
This
operation
[
MOVE
]
button
after
the
above
-
described
step
①
.
•
When
the
[
COMPONENT
RECOGNITION
]
key
is
selected
and
the
[
MOVE
]
button
is
pressed
,
the
following
action
takes
place
.
③
Component
recognition
is
performed
.
Note
:
This
operation
can
be
continued
only
by
pressing
the
[
MOVE
]
button
after
the
above
-
described
step
②
.
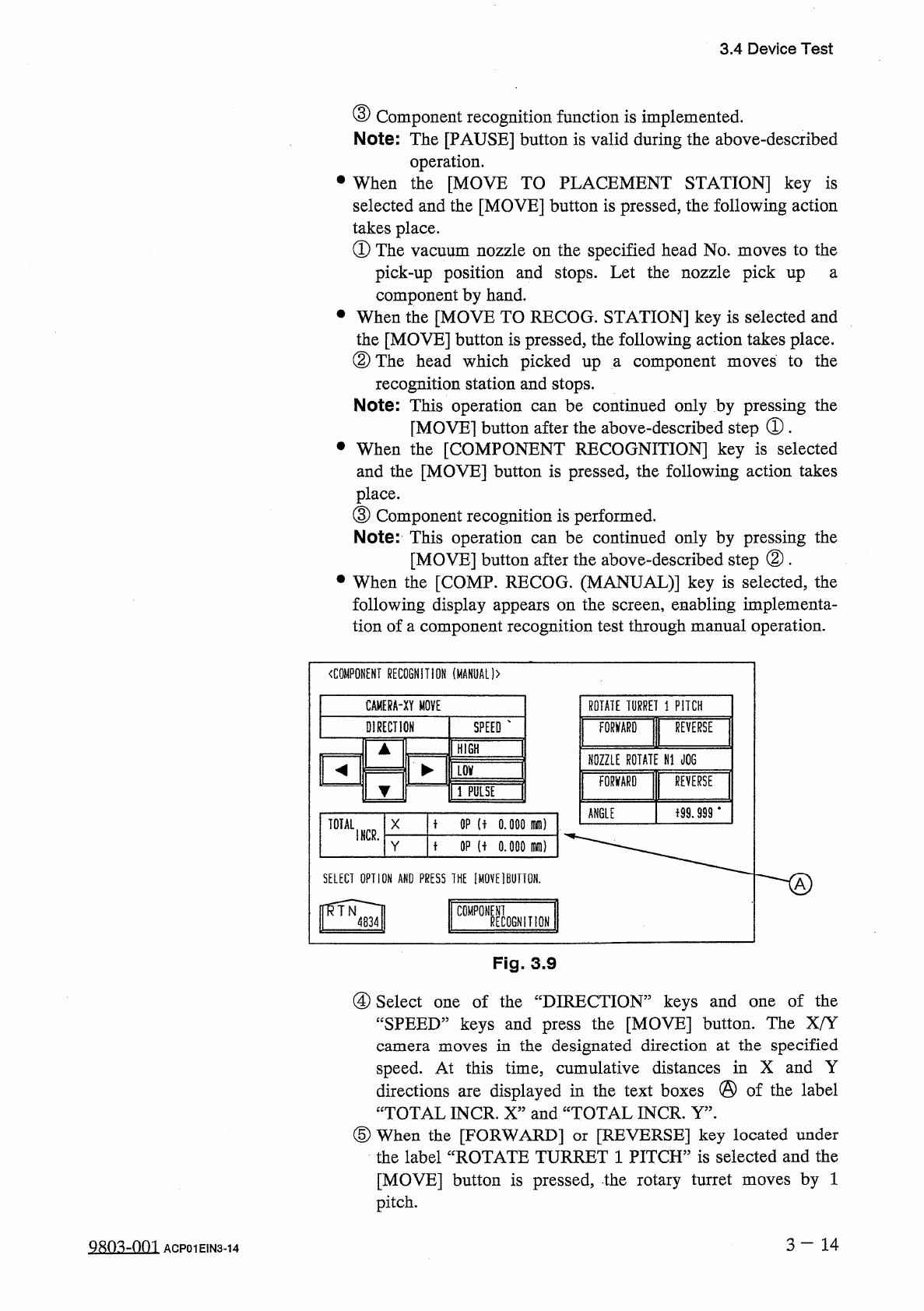
•
When
the
[
COMP
.
RECOG
.
(
MANUAL
)
]
key
is
selected
,
the
following
display
appears
on
the
screen
,
enabling
implementa
-
tion
of
a
component
recognition
test
through
manual
operation
.
to
the
moves
be
continued
only
by
pressing
the
can
〈
COMPONENT
RECOGNITION
(
MANUAL
)
>
CAMERA
-
XY
MOVE
ROTATE
TURRET
1
PITCH
DIRECTION
SPEED
FORWARD
I
REVERSE
HIGH
NOZZLE
ROTATE
N
1
JOG
气
►
墜
FORWARD
I
REVERSf
LSE
子
99.999
‘
ANGLE
t
OP
(
f
o
.
ooomm
)
TOTAL
X
I
NCR
.
t
OP
u
o
.
ooo
m
)
SELECT
OPTION
AND
PRESS
1
HE
[
MOVE
]
BUTTON
.
h
,
二
J
Fig
.
3.9
④
Select
one
of
the
“
DIRECTION
”
keys
and
“
SPEED
”
keys
and
press
the
[
MOVE
]
button
.
The
X
/
Y
camera
moves
in
the
designated
direction
at
the
specified
speed
.
At
this
time
,
cumulative
distances
in
X
and
Y
directions
are
displayed
in
the
text
boxes
@
of
the
label
“
TOTAL
INCR
.
X
”
and
“
TOTAL
INCR
.
Y
”
.
⑤
When
the
[
FORWARD
]
or
[
REVERSE
]
key
located
under
the
label
“
ROTATE
TURRET
1
PITCH
”
is
selected
and
the
[
MOVE
]
button
is
pressed
,
the
rotary
turret
moves
by
1
pitch
.
of
the
one
Qsn
^
-
nm
ACP
01
EIN
3
-
14
3.4
Device
Test
⑥
When
the
[
FORWARD
]
or
[
REVERSE
]
key
located
under
the
label
“
NOZZLE
ROTATE
N
1
JOG
”
is
selected
and
the
[
MOVE
]
button
is
pressed
,
angle
of
the
component
can
be
jogged
.
(
6
)
Test
ID
data
can
be
edited
before
or
after
a
recognition
test
is
performed
.
•
When
the
recognition
test
results
in
“
NG
”
(
No
Good
)
,
change
the
test
ID
data
and
re
-
perform
the
recognition
test
.
(
7
)
When
the
[
HYSTERESIS
TEST
]
key
is
pressed
,
the
“
HYSTERESIS
TEST
”
display
appears
on
the
screen
.
Hysteresis
test
operation
is
possible
only
when
a
component
is
located
at
the
recognition
station
after
the
operation
menus
of
the
“
COMPONENT
RECOG
.
TEST
”
display
(
Fig
.
3.8
)
implemented
.
•
A
hysteresis
test
is
performed
according
to
the
parameters
set
in
the
text
boxes
of
the
labels
“
OVERALL
TACT
-
TIME
OVERALL
TACT
-
TIME
are
REDUCTION
MODE
”
and
REDUCTION
TACT
-
TIME
”
,
the
parameter
set
in
the
text
box
of
the
label
“
HEAD
ROTATE
THETA
”
,
the
parameter
set
in
the
text
box
of
the
label
“
#
OF
HYSTERESIS
”
,
and
the
parameter
set
in
the
text
box
of
the
label
“
PLACEMENT
MODE
”
.
After
that
,
the
test
result
is
displayed
.
(
8
)
To
Exit
from
Component
Recognition
Test
Session
•
Select
the
[
ZEROING
FDR
.
AXIS
&
COMP
.
COLLECTION
]
key
and
press
the
[
MOVE
]
button
.
The
feeder
axis
,
the
X
/
Y
table
,
and
the
X
/
Y
return
to
their
origins
and
the
component
located
at
the
recognition
station
is
transferred
to
No
.
8
station
(
the
station
just
before
the
machine
takes
placement
action
)
.
•
Collect
the
component
.
camera
Note
:
When
the
[
VAC
.
VALVE
ON
/
OFF
]
switch
is
pressed
,
the
vacuum
for
vacuum
nozzles
can
be
turned
ON
or
OFF
.
3
—
15
9803
-
001
ACP
01
EIN
3
-
15
3.4
Device
Test
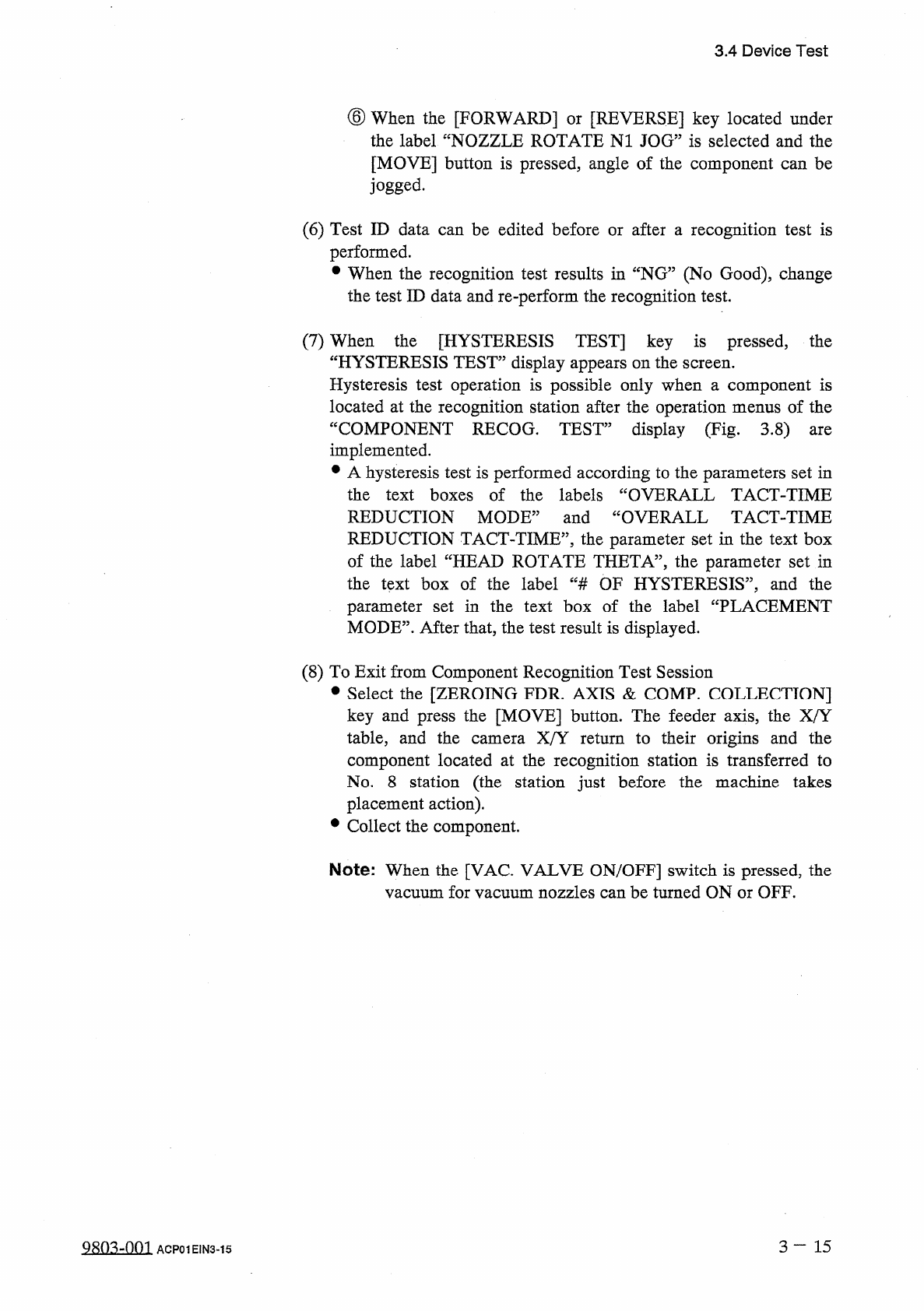
■
Result
of
Component
Recognition
•
After
recognition
is
completed
normally
for
component
recognition
test
,
the
following
(
example
)
appears
on
the
recognition
monitor
.
:
oooooooooooooooo
=
0000
Y
^
OOOO
THETA
-
OO
.
O
TIME
=
QOOO
Fig
.
3.10
①
p
=
0000000000000000
This
shows
a
component
ID
name
for
component
recognition
test
.
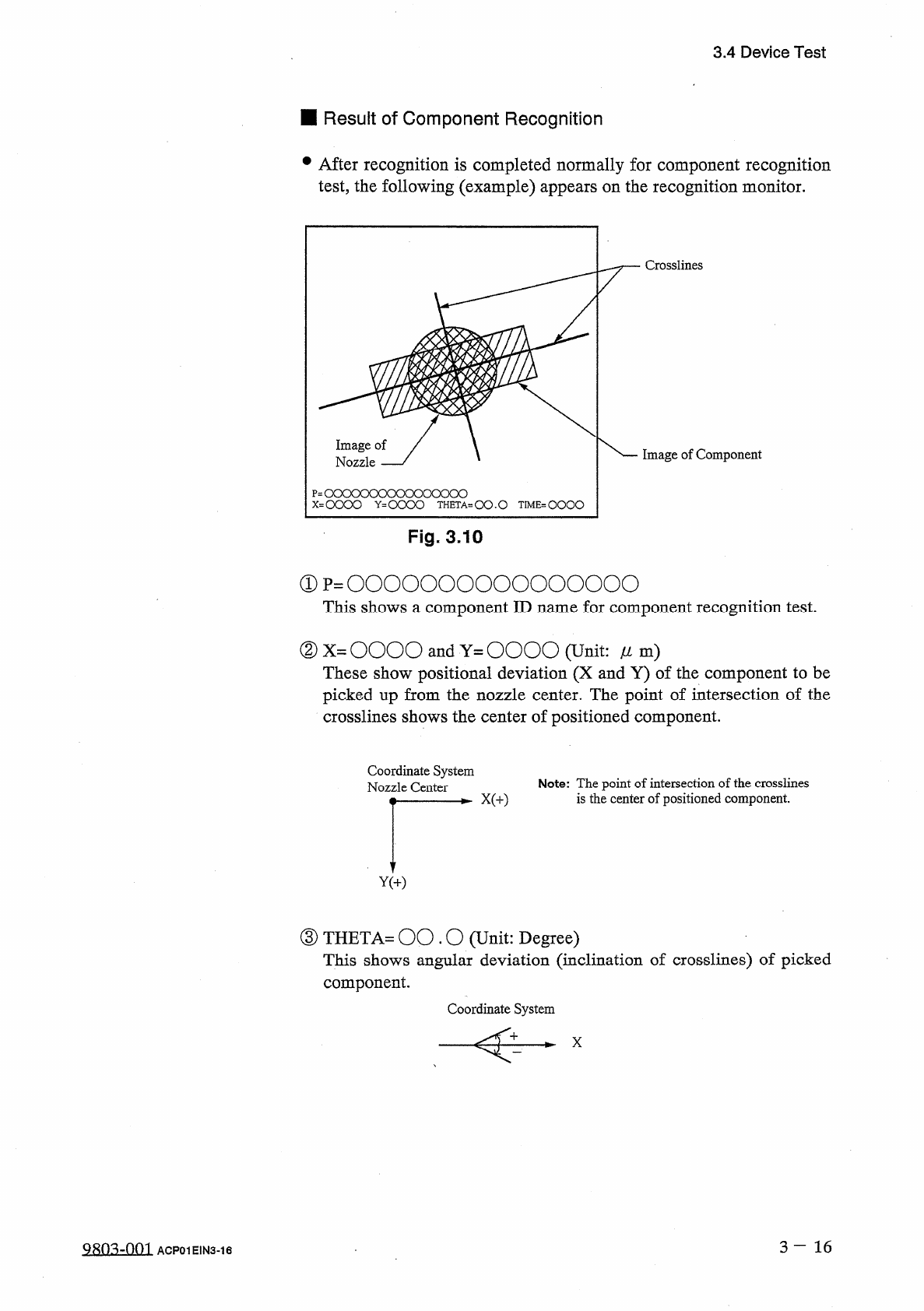
②
X
=
OOOO
and
Y
=
OOOO
(
Unit
:
/
/
m
)
These
show
positional
deviation
(
X
and
Y
)
of
the
component
to
be
picked
up
from
the
nozzle
center
.
The
point
of
intersection
of
the
crosslines
shows
the
center
of
positioned
component
.
Coordinate
System
Nozzle
Center
Note
:
The
point
of
intersection
of
the
crosslines
is
the
center
of
positioned
component
.
③
THETA
=
00.0
(
Unit
:
Degree
)
This
shows
angular
deviation
(
inclination
of
crosslines
)
of
picked
component
.
Coordinate
System
X
3
-
16
9803
-
001
ACP
01
E
1
N
3
-
16