3MAINTENANCE__O.pdf - 第140页
3.6 Device Check < \ m CHECH - UOTOS CONTROL - ) 04 / 06 < INPIIT CHECJ > PORT NAME : M H — 1 25 / 44 PORT m H - ii INPUT NAME BIT INPUT NAME STATUS BOTABY TUBBET STATUS . 1 iBUSY . UP . DOVII … j . 0 BUSY ( MOV…
3.6
Device
Check
u
INPUT
CHECK
”
Display
(
Fig
.
3.36
)
3
MOTOR
CONTROL
<
HiPUT
mi
>
PORT
NAME
:
M
DD
-
i
<
!
HPUT
CHECK
-
UOIOS
COHTKOL
-
)
01
/
06
01
/
44
BIT
PORT
INPUT
NAME
INPUT
NAME
STATUS
0
COUUNO
DISABLE
HDD
-
1
HEAD
SI
(
COMHAHD
(
COMMAND
DISABlE
;
H
0
T
0
g
,
B
[
}
5
Y
-
DgTPIJI
-
l
ON
UOTOR
BUSY
1
HDD
-
2
HEAD
12
D
15
ABLf
.
iJ
5
Y
.
0
…
r
.
OFF
0
HEAD
13
(
COHMAHD
DISABIE
^
OTOB
81
)
打
,
0
讥卩讥
…
}
HEAD
14
(
DQ
D
DiSABlE
^
DIOE
BUSY
•
QtlTPUI
…
}
~
2
VACUUM
SOLEKOID
(
SVI
)
HDD
-
3
OFF
0
3
IX
BAN
6
E
HDfl
-
4
OFF
0
iOCSPOSITIliH
4
OFT
HEAD
15
(
COKMAKD
D
1
SABLEW
;
BUSY
-
OyiPUT
-
•
)
*
>
flFF
0
HEAD
16
(
COMMAHD
DlSitBLE
-
MOIOB
BUSY
-
OUTPUT
-
*
j
5
mi
咖
OFF
.
OFF
0
6
HEAD
17
(
COMHAHD
0
】
SABLE
.
麵
BUSY
-
lDliTPlII
—
}
am
u
BD
:
8
All
HEAD
tB
(
COUHAHD
DlSABLE
'
-
MOTQg
BUSY
-
OUTPIIT
—
)
7
CQUHIKICATIOH
ERROR
ON
E
/
K
1
BHT
EMIHED
AND
RECEIVED
.
E
/
HR
-
UGHT
EMITTED
AND
NOT
RECEIVED
.
.
»
邛茲
EMP
践心
II
PLEASE
SELECT
THE
INPUT
CHECK
PORT
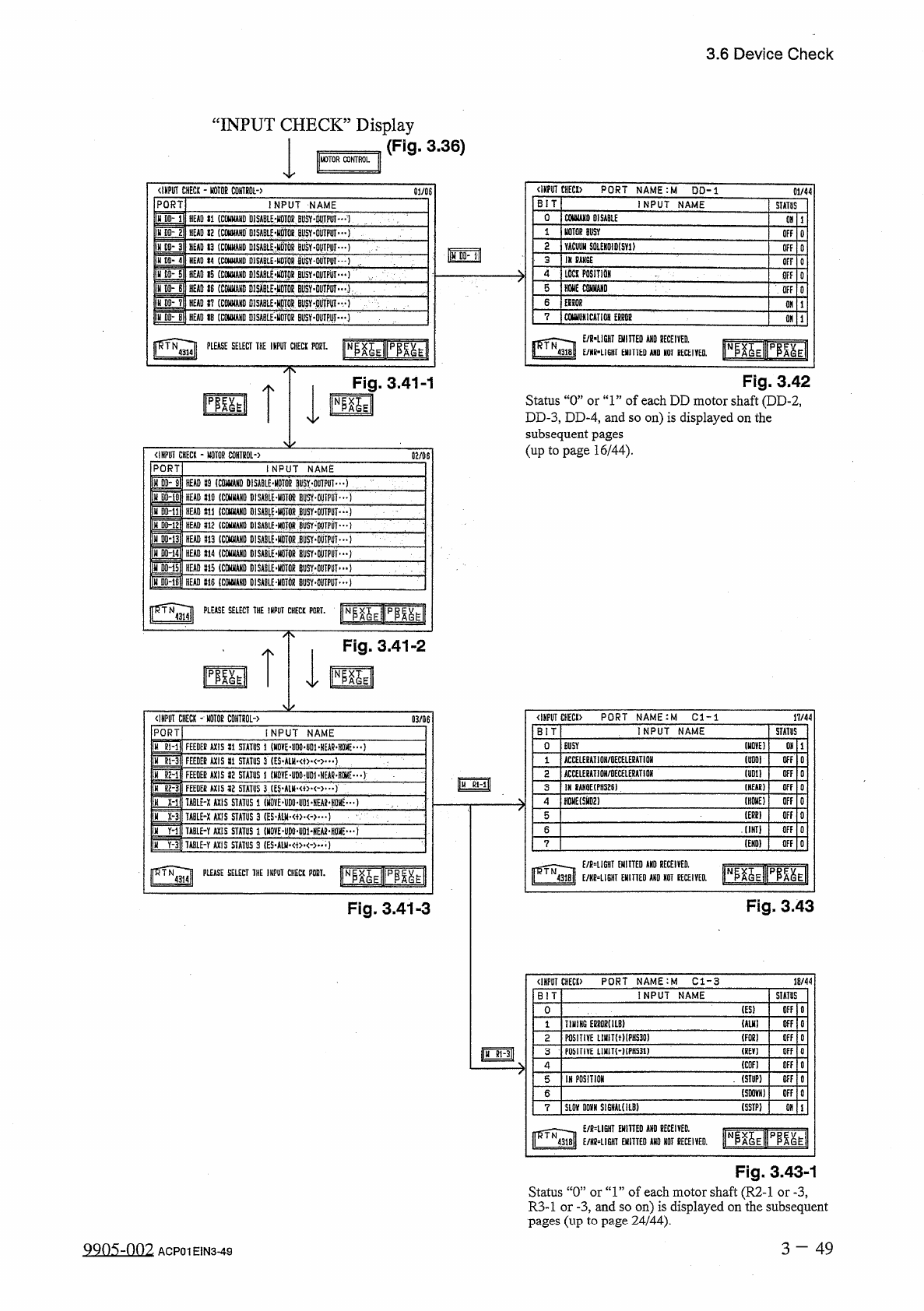
Fig
.
3.42
Status
“
0
”
or
“
1
”
of
each
DD
motor
shaft
(
DD
-
2
,
DD
-
3
,
DD
-
4
,
and
so
on
)
is
displayed
on
the
subsequent
pages
(
up
to
page
16
/
44
)
.
Fig
.
3.41
-
1
HmE
\
y
<
INPin
CHECK
-
H
0
T
0
R
CONTROL
-
〉
(
I
2
/
0
S
PORT
INPUT
NAME
HDD
-
9
HEAD
89
{
COMHD
mi
D
1
SAGLE
-
M
070
B
BUSt
-
OUTPUT
—
)
DISABLE
-
MOTOfi
BUSY
-
DllIPin
—
]
»
DD
-
IO
HEAD
010
HEAD
m
(
COMAKD
DISABLE
•
MTOR
BUSY
-
OIITPUT
—
)
H
PHI
HEAD
U
2
(
CDMHAffl
DISABLE
.
MOT
评
gUSY
.
DOT
唢
…
1
HEAD
m
3
tCQMHmD
DISABU
.
呱
OR
JUSY
加
IPtIT
…
1
(
COHUAXP
DISABiE
-
HQfOR
BUSY
»
0
t
)
TPliT
»
»
)
H
DD
-
12
M
DD
.
13
OH
4
HEAD
#
14
DISABLE
-
MOTOR
BUSY
-
OUTPUT
-
)
U
DD
-
15
HEAD
m
(
C
D
OIAIAKD
iTDH
6
HEAD
Bi
6
(
C
DISAaii
-
MQTOfl
BUSY
-
OUTPUT
—
)
PLEASE
SELECT
THE
1
HPUT
CHECK
PORI
.
Fig
.
3.41
-
2
Fun
vl
/
<
INPUT
CHECK
>
PORT
NAME
:
M
Cl
一
1
17
/
44
<
1
NPUT
CHECK
-
M
CONTROL
-
)
03
/
0
$
INPUT
NAME
BIT
STATUS
PORT
f
gHl
INPUT
NAME
(
U
0
VE
)
0
BUSY
OH
FEEDEB
AXIS
SI
STATUS
1
(
MDV
^
UD
0
«
t
)
Dl
*
NEAR
*
H
0
HE
••
-
)
Off
ACCELERMI
0
K
/
DECELEBATI
0
U
(
UD
0
)
0
[
OH
]
FEEDER
AXIS
Hi
STATUS
3
(
ES
,
AUHtw
-
>
FEEDEB
AXIS
«
STATUS
1
(
腑
E
觀唧
UEAHlk
…
)
:
W
1
H
\
ACttLERATIOH
/
OECELERATlOH
(
UDll
OFF
2
0
!
N
8
腿
(
PHS
26
!
(
KEW
)
3
OFF
0
[
OF
!
]
FEEDER
^
XIS
«
2
STATUS
3
(
ES
;
AlH
»
<
i
>
-
<
-
>
—
)
酬
E
(
S
如
2
) (
HOME
)
Off
4
0
mi
TABLE
-
X
AXIS
STATUS
1
{
H
0
VE
-
«
D
0
-
UD
1
*
KEA
8
*
P
^
-
)
圃
5
OFf
0
irai
TABLE
-
X
AXIS
STATUS
3
{
ES
-
ALM
-
«
>
-
<
-
>
—
)
.
HHT
)
OFF
6
0
FTTI
TABLE
-
Y
AXIS
STATUS
1
(
MOVE
.
UpO
.
ODHEAHtm
(
EN
0
)
OFF
7
0
TABLH
AXIS
STATUS
3
(
ES
-
Al
»
»
<
i
>
-
<
-
>
-
«
<
}
E
/
R
=
IIGHT
EMITTED
AND
RECEIVED
.
E
/
HM
1
SHI
EHinED
AND
XOT
KECEIYE
0
.
«
N
^
5
EIPP
^
eI
.
rMUMil
PLEASE
SELECT
THE
INPUT
CHECK
POUT
Fig
.
3.43
Fig
.
3.41
-
3
《
INPUT
CHECK
〉
PORT
NAME
:
M
Cl
—
3
18
/
44
INPUT
NAME
STATUS
BIT
(
ESI
0
OFF
0
TIMING
EKQKdLB
}
{
AUO
OFF
0
POSITIVE
L
!
HIT
{
t
)
{
PHS
30
}
(
FOR
)
Off
0
2
POSITIVE
LIH
!
T
(
-
)
{
PHS
31
)
(
REV
)
OFF
0
3
(
CDF
)
OFF
0
4
.
(
SIUP
)
5
IN
POSITION
Off
0
(
SD
0
VH
)
Off
6
0
SL
0
V
00
VH
SiGNAL
{
lLB
)
(
SSIP
)
ON
?
E
/
R
=
LISHT
mmo
AK
0
RECEIVED
.
E
/
MKI
6
HT
EMITTED
AH
0
NOT
RECEIVES
.
11
NP
^
EII
1
PP
^
EI
1
Fig
.
3.43
-
1
Status
“
0
”
or
“
1
”
of
each
motor
shaft
(
R
2
-
1
or
-
3
,
R
3
-
1
or
-
3
,
and
so
on
)
is
displayed
on
the
subsequent
pages
(
up
to
page
24
/
44
)
.
3
-
4 9
9905
-
002
ACP
01
EIN
3
-
49
3.6
Device
Check
<
\
m
CHECH
-
UOTOS
CONTROL
-
)
04
/
06
<
INPIIT
CHECJ
>
PORT
NAME
:
M
H
—
1
25
/
44
PORT
m
H
-
ii
INPUT
NAME
BIT
INPUT
NAME
STATUS
BOTABY
TUBBET
STATUS
.
1
iBUSY
.
UP
.
DOVII
…
j
.
0
BUSY
(
MOVE
)
OX
ROTARY
TURRET
STATUS
3
ACCELEBAT
10
K
(
UOO
)
OfF
0
1
jti
TB
-
aj
IK
CZ
-
"
I
|
TRANSFEB
STATUS
i
⑽
SY
*
UP
*
MW
|
…
)
(
U
01
)
2
DECaEBAHOH
IH
MN
6
£
(
CJm
tlHlKS
8
)
OFF
0
fTHl
1
MKSFER
STATUS
3
卿
efF
.
3
0
CttlP
.
PlCI
-
UP
(
Z
)
AXIS
STATUS
1
'
{
BUSY
-
UP
.
MW
-
-
)
OFF
0
4
CIMP
.
PICII
-
UP
(
Z
)
iixis
STATUS
3
COMP
.
PLACEMEHTtZ
)
AXIS
STATES
1
(
8
DSY
-
ilP
«
-
-
-
'
)
Ctt
^
PLACEHEIIT
(
Z
}
^
IS
WATUS
3
IF
^
al
m
\
Off
5
o
\
U
MZ
-
1
UNT
}
6
OfF
0
(
EtiD
)
7
OfF
0
:
£
/
8
=
LIGHT
EU
]
?
I
£
0
AND
Ktt
呢
a
E
7
KKHI
拙
nKIITED
AHO
'
ICT
BECEIYED
.
r
^
i
i
啊
ypPi
;
y
PLEASE
SELECT
THE
INPUT
CHECK
Ml
MB
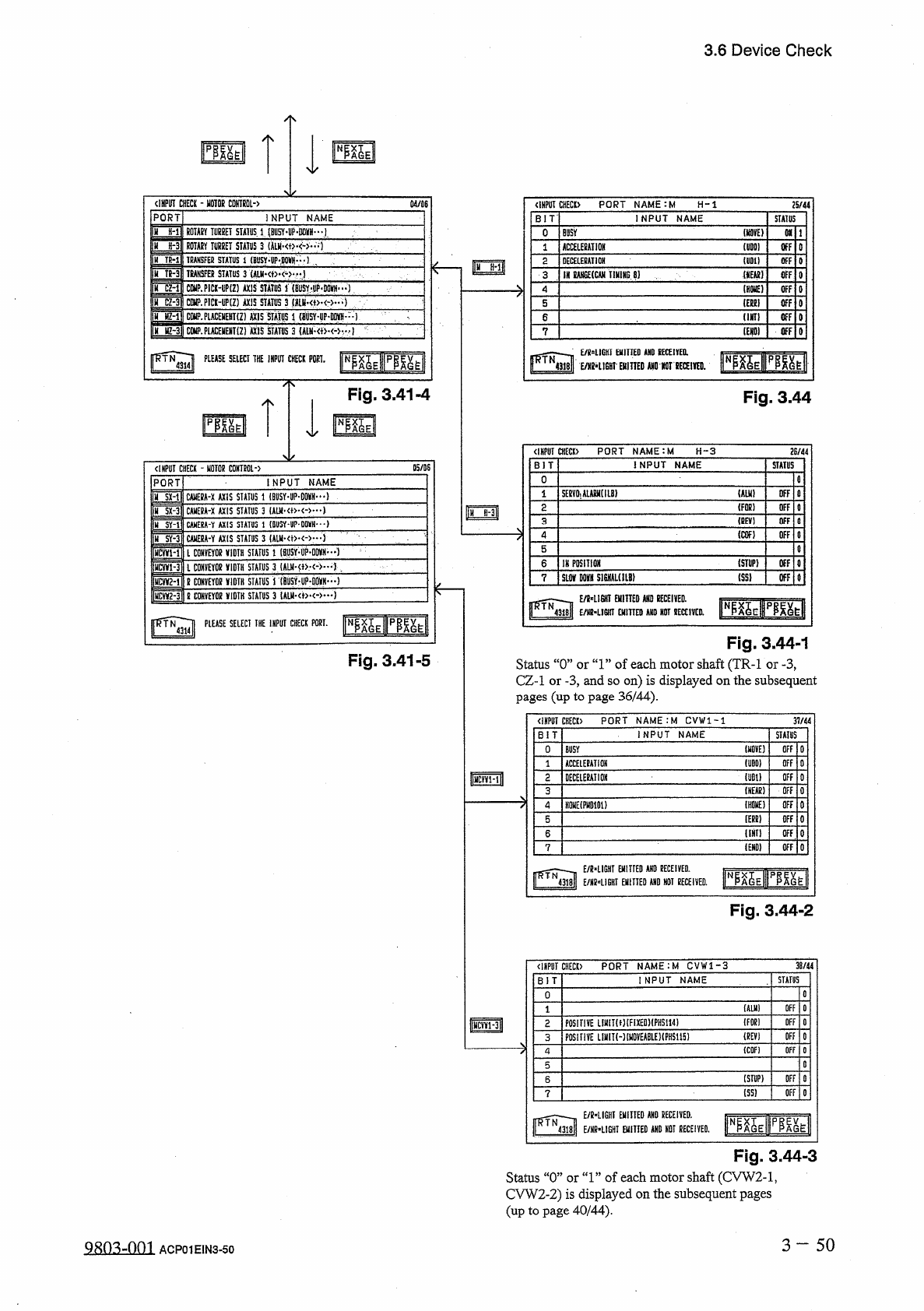
Fig
.
3.41
-
4
Fig
.
3.44
<
INPUT
CHECK
)
PORT
NAME
:
M
H
-
3
26
/
44
BIT
INPUT
NAME
STATUS
05
/
D
6
(
INPUT
CHECK
-
MOTOR
C
0
KIJ
!
fll
-
>
0
0
INPUT
NAME
PORT
SEUVOiAlAKHULB
}
(
ALU
)
OFF
D
i
mm
-
X
AXIS
STATUS
1
刚
SY
,
UP
⑽
(
H
…
)
M
SX
-
1
(
FOR
)
2
OFF
0
IHTffl
CAMEIfA
-
X
AXIS
STATUS
3
)
H
5
X
-
3
(
REV
)
OFF
3
0
CAHERA
-
Y
AXIS
STATUS
1
{
fiU
5
Y
,
UP
.
D
刪
…
}
CAMEfiA
-
Y
AXIS
STATUS
3
(
ALM
-
<
t
>
-
<
-
>
-
0
H
SY
-
1
(
COf
)
OFF
0
4
»
SY
-
3
0
5
L
mnm
VIOTH
STATUS
I
(
BUSY
-
DP
-
DWH
)
Mcm
-
i
(
STUP
)
6
IK
posmox
OFF
l
CONVEKQg
V
1
DTH
STATUS
3
.
UIM
.
0
.
,
<
•
>
•
“
}
.
?
COKVEY
08
mu
STATUS
1
(
B
啤
■
UP
-
DO
,
.
-
)
CTH
SLW
mi
S
1
GKALULB
)
(
SSI
OfF
0
7
jMCW
2
-
l
B
C
0
HVEY
0
K
WIDTH
STATUS
3
ULH
-
<
b
-
<
-
>
—
}
1
MOT
2
-
3
E
/
8
«
iiem
Einmo
AND
RECEIVED
.
E
/
W
«
l
!
Gin
EHITTED
AHD
HOT
SECEIVED
.
lN
^
£
E
|
|
pPI
^
II
.
r j k n i y
PLEASE
SELECT
!
HE
INPUT
CHECK
PORT
Fig
.
3.44
-
1
Fig
.
3.41
-
5
Status
“
0
”
or
“
1
”
of
each
motor
shaft
(
TR
-
1
or
-
3
,
CZ
-
1
or
-
3
,
and
so
on
)
is
displayed
on
the
subsequent
pages
(
up
to
page
36
/
44
)
.
<
1
HPUI
CHECK
)
PORT
NAME
:
M
CVW
1
-
1
37
/
44
INPUT
NAME
BIT
STATUS
E
)
0
OFF
0
BUSY
OFF
ACCELEBATiON
0
(
UD
1
)
2
DECElEHATIOll
OFF
0
3
{
NEAR
)
OFF
0
HOHE
(
PHOIOI
)
E
)
OFF
0
4
urn
OFF
5
0
mu
OFF
0
6
(
END
)
OFF
0
7
E
/
R
-
U
6
HT
EMITTED
iUiO
RECEIVED
.
E
/
MH
1
GHT
EHiTIED
AND
NOT
RECEIVED
.
榀
E
P
斷
N
Fig
.
3.44
-
2
<
IJIPUT
CHECK
)
PORT
NAME
:
M
CVW
1
-
3
38
/
44
iNPUT
NAME
STATUS
BIT
0
0
(
AIM
)
OFF
0
POSITIVE
LWlKOfFIXEDHPHSm
)
{
FORI
OFF
0
2
jlncm
-
3
(
l
(
REV
)
OFF
POSITIVE
UHIT
(
-
}
(
H
0
VEA
8
LE
)
(
PHSli
5
)
0
3
(
COF
)
OFF
0
4
0
5
(
SHIP
)
OFF
0
6
(
SS
)
Off
0
?
E
/
KIGHT
EMITTED
AND
RECEIVED
.
E
/
KB
-
USHT
DiiTIED
AND
NQT
RECEIVED
.
MM
Fig
.
3.44
-
3
Status
“
0
”
or
“
1
”
of
each
motor
shaft
(
CVW
2
-
1
CVW
2
-
2
)
is
displayed
on
the
subsequent
pages
(
up
to
page
40
/
44
)
.
3
-
5 0
9803
-
001
ACP
01
EIN
3
-
50
3.6
Device
Check
小
國
|
麗
{
INPUT
CHECK
-
UOTOe
COKIROL
-
J
<
INPUT
CHECK
)
PORT
NAME
:
M
CHW
-
1
41
/
44
PORT
INPUT
NAME
B I T
INPUT
NAME
STATUS
m
TABLE
CHUTE
K
10
IH
STATUS
1
{
|
USY
-
HP
-
DOTH
-
v
)
:
m
TABLE
CHyTE
^
IlDIH
STATUS
3
PCB
SUPPORT
PIUS
UP
/
DMH
'
$
UTU
5
:
l
'
(
^
>
TQfi
BOSY
-
COMWIO
DISABLE
-
"
PCB
SUPPOBr
P
1
KS
UP
/
DOVH
STATUS
3
-
QtQTDII
BUSY
COMttilD
DiSABL
^
-
T
MCHIH
0
MOTOR
BUSY
OFF
0
M
CW
-
3
COiAUND
DISABLE
OFF
0
1
BPC
-
1
2
DRIVER
AUM
OFF
0
<
■
PPM
DATA
REQUEST
3
OFF
0
COMMAND
REQUEST
4
OFF
0
5
COMUND
EBItOI
;
OFF
0
6
ERBOR
OFF
0
7
COWUNICATiOK
ERBOB
OFF
0
E
/
fi
=
LI
6
Hr
EMITTED
AND
6
ECEIVED
.
E
/
HHIGUr
EHITIED
AKD
NOT
RECEIVED
.
iN
_
Eipg
艮
;
y
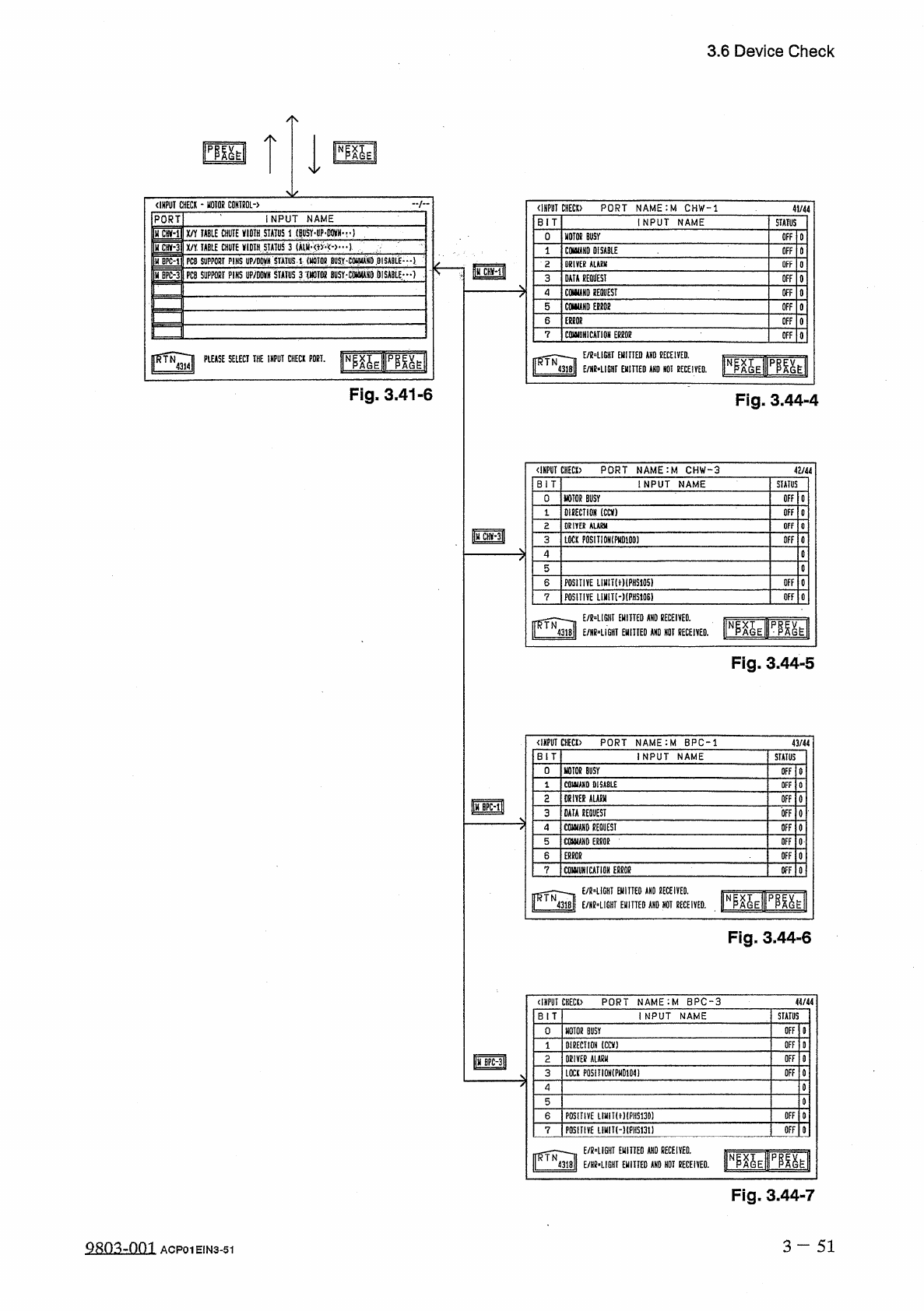
PLEASE
SELECT
THE
INPUT
CHECK
PORI
.
Fig
-
3.41
-
6
Fig
.
3.44
-
4
<
!
»
PUI
CHECK
)
PORT
NAME
:
M
CHW
-
3
42
/
44
B I T
INPUT
NAME
STATUS
0
MOTOR
BUSY
Off
0
OStECTION
(
CCV
)
1
OFF
0
2
DRIVER
AURU
OFF
0
h
Ct
«
-
3
(
|
LOCK
POSITlONIFUDiOO
)
3
OFF
0
4
0
5
0
POSITIVE
LIU
(
T
{
i
)
(
PHS
105
)
6
OFF
0
POSITIVE
LIMITI
-
JIPHSIOB
)
7
OFF
0
E
/
MIGHT
EMITTED
AND
RECEIVED
.
4318
E
/
NR
-
LIGHT
EUIIIEO
AND
HOT
RECEIVED
.
E
N
Fig
.
3.44
-
5
<
IHPUT
CHECD
PORT
NAME
:
M
BPC
-
1
43
/
44
BIT
INPUT
NAME
STATUS
0
UOIOB
BUSY
OFF
0
COl
&
IAND
DISA
8
LE
OFF
0
OR
IYER
ALARM
2
OFF
0
1
MBP
(
M
|
OFF
DATA
REQUEST
3
0
COMMAND
REQUEST
4
OFF
0
5
COMMAND
ERROB
OFF
0
6
im
OFf
0
7
COttlUKICATION
EBROR
OFF
0
E
/
R
=
LIGHT
EMITTED
AND
RECEIVED
.
E
/
NHIGHT
EliinED
ANO
NOT
RECEIVED
.
Fig
.
3.44
-
6
<
INPUT
CHECH
)
PORT
NAME
:
M
BPC
-
3
44
/
44
INPUT
NAME
BIT
STATUS
OFF
0
0
KOTOR
BUSY
DIRECTION
(
CW
)
OFF
0
1
lix
BPC
-
3
II
2
OFF
13
DR
膽
kim
LOCK
P
05
IIIOH
(
PUD
104
}
OFf
0
3
0
4
0
5
POSITIVE
UliiT
(
t
)(
PHS
130
)
OFF
0
6
POSITIVE
UKIT
(
-
}
(
PHS
13
t
)
OFF
0
7
—
^
E
/
R
*
UGHT
EMITTED
AHD
RECEIVED
.
4318
E
/
HKIBHT
EUITTED
AKD
HOT
RECEIVED
.
Iimipp
^
^
fl
E
N
Fig
.
3.44
-
7
3
—
5 1
Q
只
mom
ACP
01
EIN
3
-
51