00198371-01_UM_SWS-EN.pdf - 第26页
1 Introduction User manual SIPLACE Wafer System (SWS) 1.2 Description of functions Edition 04/2018 26 1.2.4.4 Flip chip encoded positions (af ter calibration) 1 1 Fig. 1.2 - 9 Flip chip encoded positions - after calibrat…
User manual SIPLACE Wafer System (SWS) 1 Introduction
Edition 04/2018 1.2 Description of functions
25
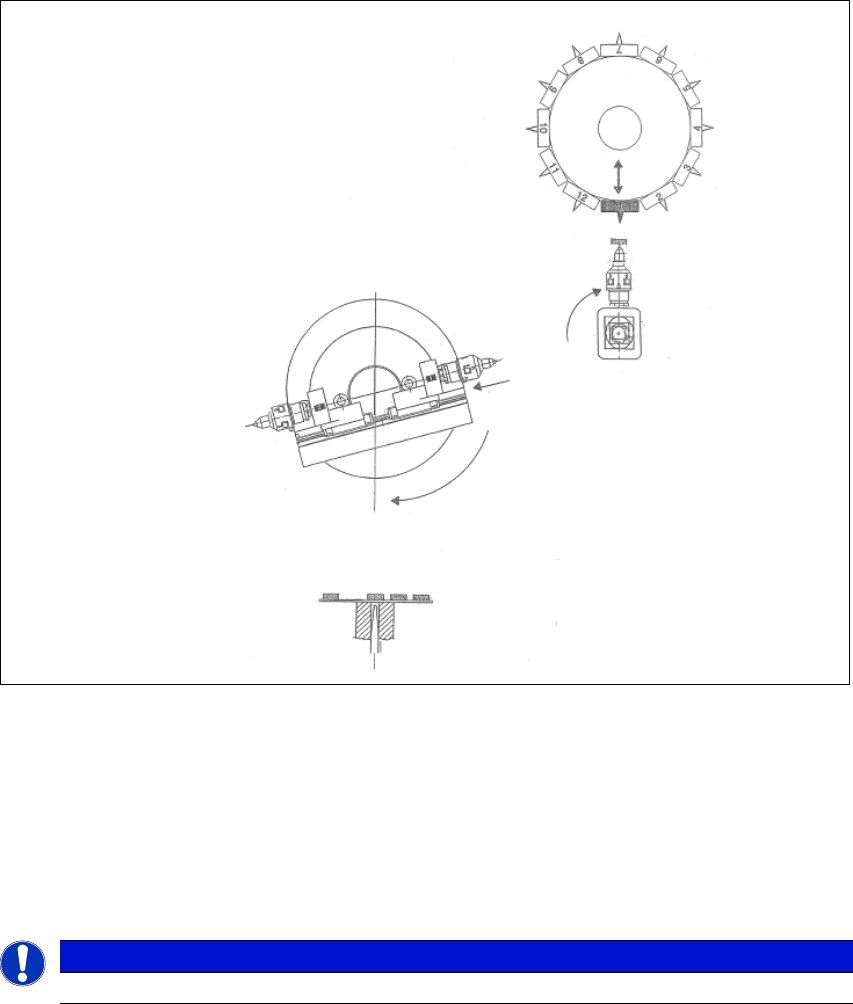
1.2.4.3 Die attach - transfer process
1
Fig. 1.2 - 8 Die attach - handover process (basic principle)
(1) The die attach rotates to the transfer position.
(2) The SIPLACE head picks the chip up from the die attach segment and rotates to the next star
position.
(3) At the same time the flipper transfer X axis pulls segment no. 1 back into the home position.
(4) The flip chip unit - segment no. 1 rotates to the pickup position and picks up the next chip.
1
PLEASE NOTE
While using the die attach unit only the segment no.1 of the flip chip unit is active.
(1)
(2)
(3)
(4)
1 Introduction User manual SIPLACE Wafer System (SWS)
1.2 Description of functions Edition 04/2018
26
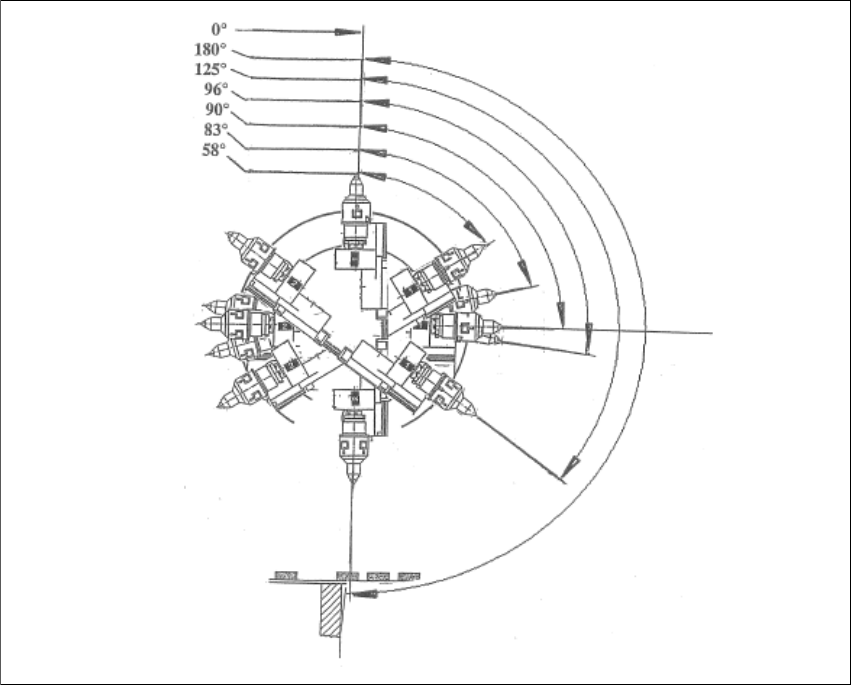
1.2.4.4 Flip chip encoded positions (after calibration)
1
1
Fig. 1.2 - 9 Flip chip encoded positions - after calibration (basic principle)
0°
Home sensor position
180°
Transfer position, segment 1
125°
Camera "free" position, segment 1
96°
Discharge position, segment 1
105°
Home offset position
83°
Discharge position, segment 2
58°
Camera "free" position, segment 2
User manual SIPLACE Wafer System (SWS) 1 Introduction
Edition 04/2018 1.2 Description of functions
27
1
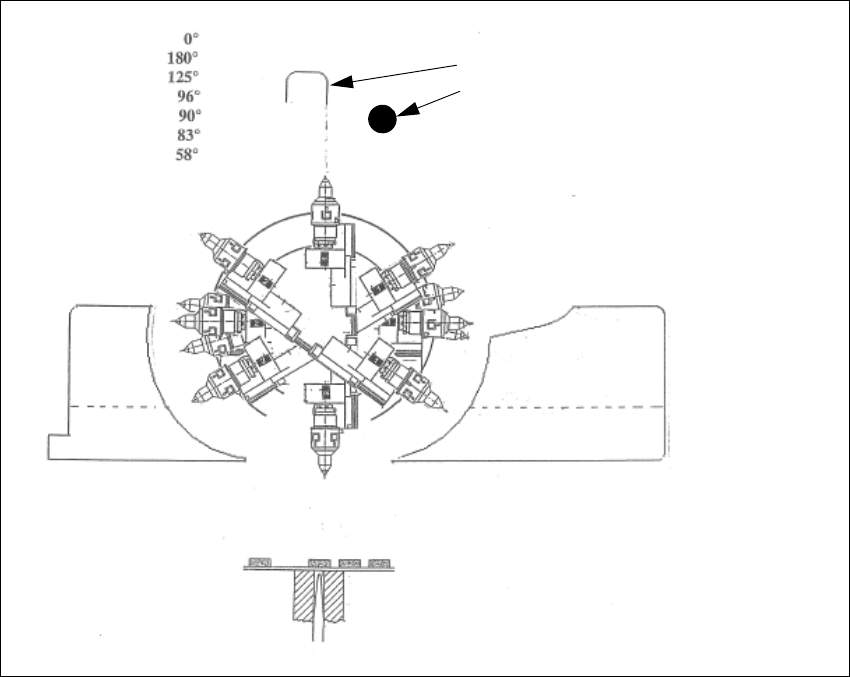
Fig. 1.2 - 10 Initialization of flip rotation axis (basic principle)
(1) Mechanical stop
(2) Home sensor
The home sensor is used to initialize the flip rotation axis. During the initialization, the rotation axis
travels slowly until the home sensor triggers. Afterwards the first zero pulse is looked up in an area
of 0-30° of the rotation axis. Through that the zero position of the flip rotation axis is defined.
Reject bin
Segment no. 2
Reject bin
Segment no. 1
1. Mechanical stop
2. Home sensor