5OM-1626-001_w.pdf - 第136页
5OM-1610 4-21 091 1-001B(M913WC---0002) X-Axis (R) Motor Circuit Diagram 3 M :A1 -X2100 :A2 :A3 :3 :4 :2 -M21 :1 -X2102L W V L2 L3 CN2L PE PE U L1 3 F AC200V AC200V CN10 -X2410 10B 24B1 U24R D C P L21 L1 1 L221 L121 L31…
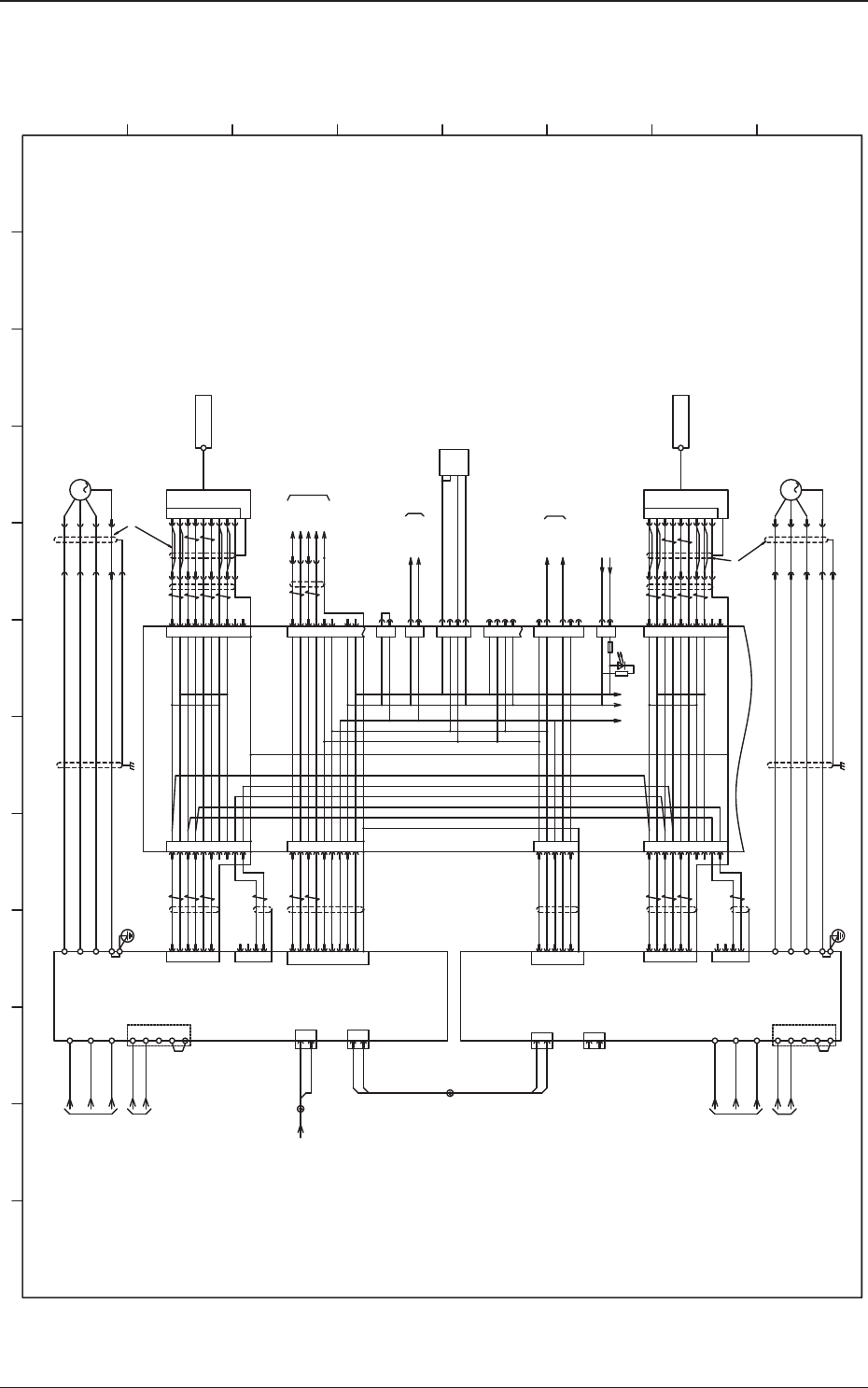
5OM-1610
4-200911-001C(M913WC---0001)
Y-Axis (R) Motor Circuit Diagram
-X12301
:A3
:A2
-X2300
:A1
-M23
:1
:2
:3
:4
-X12201
:A3
:A2
-X2200
:A1 :1
-M22
:2
:3
-B2201
-X2202L
-X2203
-X2302L
-X2303
10B
24B1
3
M
3
M
W
V
L2
L3
L11
L21
P
C
D
CN2L
PE
CN3
U
L1
3φAC200V
AC200V
W
V
U
PE
CN3
-X2401-X2402
-X2404-X2403
U24R
CN6 CN5
CN2 CN1
CN7
CN3 CN4
OUT
-
L
+
CN8
CN10
CN9
CN12
-X2407
-X2406
-X2405
-X2408
-X2410
-X2412
-X2409
:4
L221
L121
L117
L217
L317
-U22
-U22
-U23
[B-/01/11C]
[B-/01/11C]
[C-/02/1C]
[R-/03/8B]
[B-/02/5C]
-X221A
-X221B
CN1A
CN1B
L1
L2
L3
CN1A
-X231A
CN1B
-X231B
D
C
P
L21
L11
L318
L218
L118
L121
L221
Y1-Axis
-M22
A22R
A23R
Servo Motor AMP
Y1
Servo Motor AMP
Y2
Y2-Axis
-M23
U24F:CN9
-X2409:1
-X2409:3
[C-/11/6F]
CN2
CN13A
CN13B
-X2202
CN2
-X2302
CN2L
[C-/02/4E]
X19401
:B1
:B2
:B1
:B2
-U23
-X2413B
-X2413A
-X2413A:1
-X2413A:2
[C-/11/8D]
U24F:CN13A
2
4
3
2
1
7
8
7
8
1
3
2
12
5
P5
LG
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
DOCOM
LSP
LSN
DICOM
LAR
LA
6
16
LBR
LB
7
17
:13
:5
:2
:4
:12
:10
:8
:15
:6
19
14
4
16
6
11
1
7
17
9 9
17
7
1
11
6
16
4
14
19
17
7
16
6
5
12
2
3
6
16
7
17
SD
3
2
12
5
SD
DICOM
LSN
LSP
DOCOM
5
12
2
3
19
14
4
16
6
11
1
7
17
99
17
7
1
11
6
16
4
14
19
:6
:15
:8
:10
:12
:4
:2
:5
:13
3
2
12
5
1
3
2
10
8
9
4
7
2
1
3
4
7
2
1
:32
:30
:29
:31
X9401
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
SD
20
EM1
20
1
2
6
1
2
20
EM1
20
2
4
3
2
1
7
8
7
8
1
P5
LG
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
SD
CN11:5 10B
:1
:2
:3
:4
SD
24B1
1
2
1
2
24B1
24B1
24B1
24B124B1
24B1
10B
10B
10B
10B
10B
10B10B
10B
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
440
10B
1
2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
Y Beam (Rear)
From A21R-X211B
3F AC200V
AC200V
[B-/01/11D]
[B-/01/11D]
Control Circuit Power Supply
Main Circuit Power Supply
Control Circuit Power Supply
Main Circuit Power Supply
SSCNET3(ch1)
Final Axis Cap Attachment
Plate
Plate
Robot Cable
Linear Scale Head
(Converter)
Y-Axis Limit (+)
Robot Cable
Connector Case
Connector Case
Linear Scale Head
(Converter)
To U94 (Counter Board)
CN1
Connector Case
(/Phase A)
(/Phase B)
(Phase B)
(Phase A)
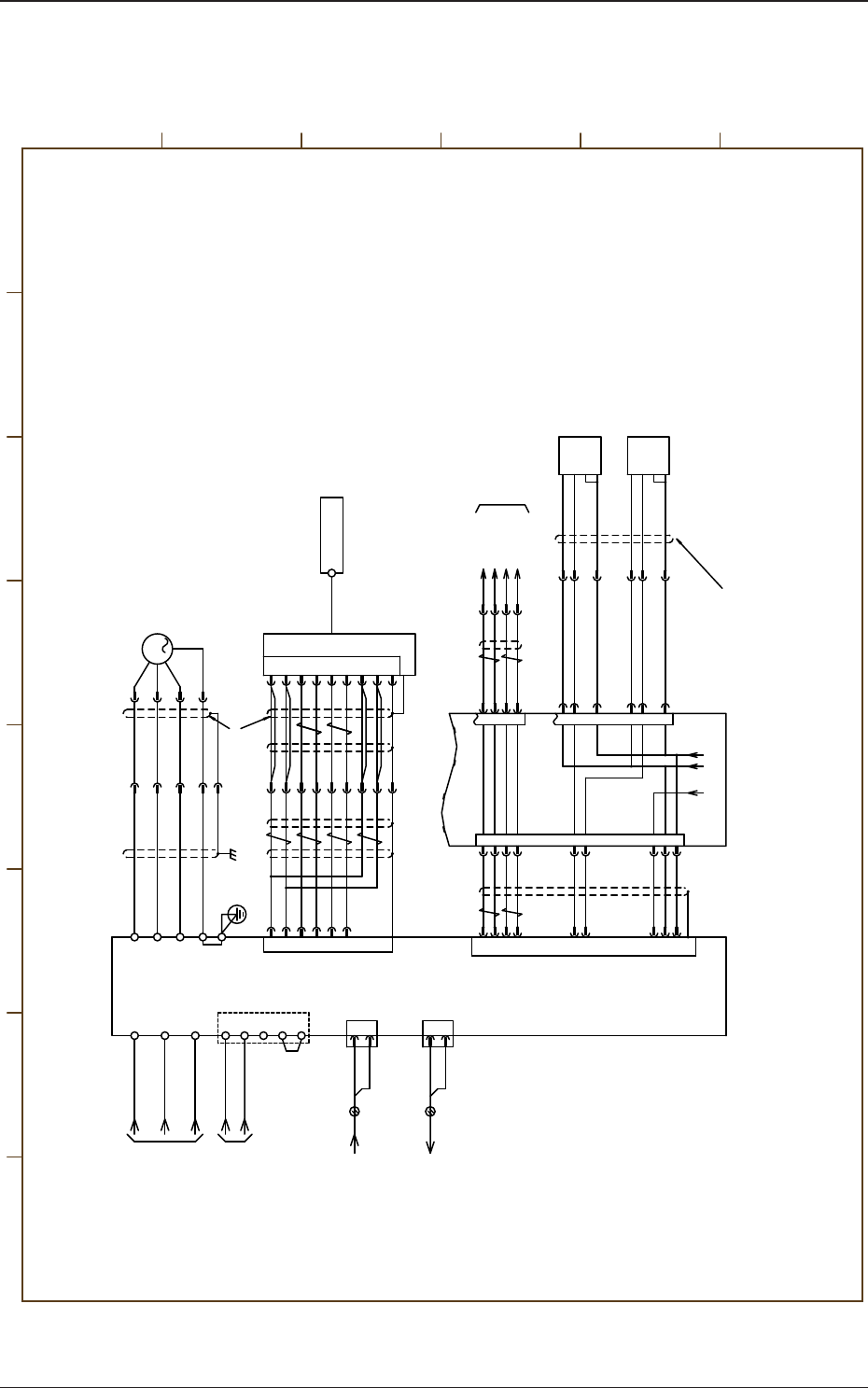
5OM-1610
4-210911-001B(M913WC---0002)
X-Axis (R) Motor Circuit Diagram
3
M
:A1
-X2100
:A2
:A3 :3
:4
:2
-M21
:1
-X2102L
W
V
L2
L3
CN2L
PE
PE
UL1
3FAC200V
AC200V
CN10
-X2410
10B 24B1
U24R
D
C
P
L21
L11
L221
L121
L316
L216
L116
OUT
-
+
-B2101
:2
-X12410
:3
:1
:4
:6
:5
-X12102
-U21
[B-/01/11B]
[B-/01/11B]
L
OUT
-
+
-B2102
L
X-Axis
-M21
A21R
Servo Motor AMP
X
-X211A
-X211B
CN1A
CN1B
[C-/01/2C]
CN5
-X2405
[R-/03/8C]
X19401-X2411
CN11
CN3
-X2103
CN13A:2
[C-/01/6F]
:B1
:B2
-U21
[C-/11/2F]
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (Rear)
6
4
5
3
3
2
12
5
DOCOM
LSP
LSN
DICOM
Plate
SD
2
4
3
1
1
2
Main Circuit Power Supply
Control Circuit Power Supply
:6
:15
:8
:10
:12
:4
:2
:5
:13
2
4
3
7
8
1
P5
LG
MRR
MR
MD
MDR
SD
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
to A22R-X221A
20
EM1
5
18
9
19
8
To U94 (Counter Board)
(/Phase A)
(/Phase B)
(Phase B)
(Phase A)
CN1
:24,16
:22,14
:21,13
:23,15
X9401
:5
:6
:7
:8
17
6
16
LBR
LA
LAR
8
7
10
7
LB
9
SSCNET3(ch1)
1
2
1
2
Connector Case
Linear Scale Head
(Converter)
SSCNET3(ch1)
From A23F-X231B
1 2 3 4 5 6 7 8
A
B
C
D
E
F
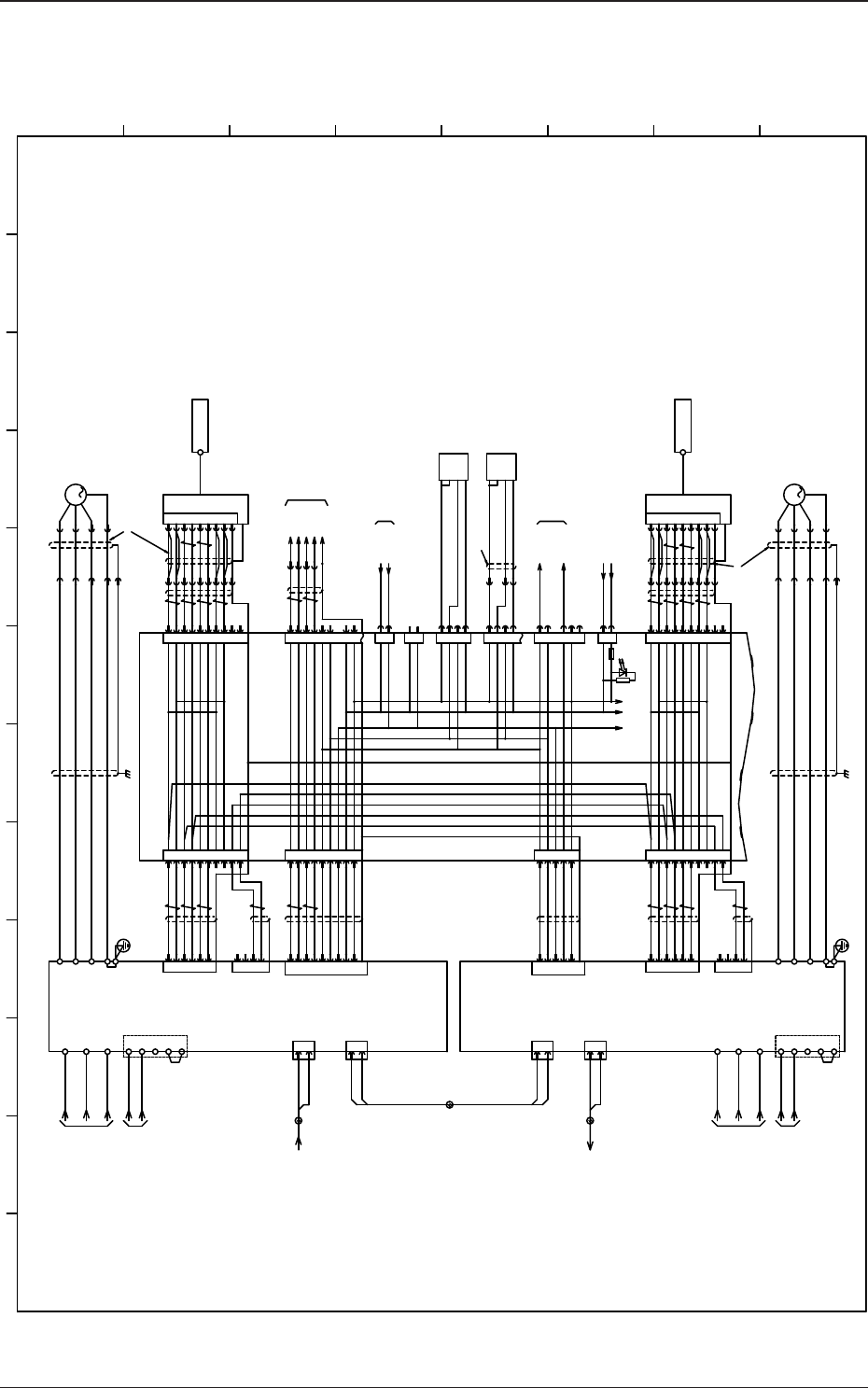
5OM-1610
4-220911-001B(M913WC---0011)
Y-Axis (F) Motor Circuit Diagram
3
M
3
M
-X12301
-X2300
-M23
:1
:2
:3
:4
-X2200
:1
-M22
:2
:3
-B2203
-X2202L
-X2203
-X2302L
-X2303
10B
24B1
W
V
L2
L3
L11
L21
P
C
D
CN2L
PE
CN3
U
L1
3FAC200V
AC200V
W
V
U
PE
CN3
3FAC200V
AC200V
-X2401-X2402
-X2404-X2403
U24F
CN6 CN5
CN2 CN1
CN7
CN3 CN4
OUT
-
L
+
CN8
CN10
CN9
CN12
-X2407
-X2406
-X2405
-X2408
-X2410
-X2412
-X2409
:4
L221
L121
L114
L214
L314
[B-/01/11F]
[B-/01/11F]
[C-/12/1C]
[B-/01/11G]
[B-/01/11G]
[R-/03/8C]
[B-/02/5C]
-X221A
-X221B
CN1A
CN1B
L1
L2
L3
CN1A
-X231A
CN1B
-X231B
D
C
P
L21
L11
L315
L215
L115
L121
L221
Y1-Axis
-M22
A22F
A23F
Servo Motor AMP
Y1
Servo Motor AMP
Y2
Y2-Axis
-M23
U24R:CN9
-X2409:1
-X2409:4
[C-/01/8F]
CN2
CN13A
-X2413A
CN13B
-X2202
CN2
-X2302
CN2L
[C-/12/4E]
X29401
U24R:CN13B
-X2413B:1
-X2413B:2
[C-/01/8D]
-B2202
OUT
-
L
+
-X12410
:A3
:A2
:A1
:A3
:A2
:A1
:B1
:B2
:B1
:B2
-X12201
-U22
-U22
-U23
-U23
[C-/02/1C]
Y Beam (Front)
To U94 (Counter Board)
From A21F-X211B
Robot Cable
2
4
3
2
1
7
8
7
8
1
3
2
12
5
P5
LG
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
DOCOM
LSP
LSN
DICOM
LAR
LA
6
16
LBR
LB
7
17
CN1
19
14
4
16
6
11
1
7
17
9 9
17
7
1
11
6
16
4
14
19
17
7
16
6
5
12
2
3
6
16
7
17
Plate
SD
3
2
12
5
SD
Plate
DICOM
LSN
LSP
DOCOM
5
12
2
3
19
14
4
16
6
11
1
7
17
99
17
7
1
11
6
16
4
14
19
:6
:15
:8
:10
:12
:4
:2
:5
:13
3
2
12
5
1
3
2
10
8
9
4
7
2
1
3
4
7
2
1
:80
:78
:77
:79
X9401
Control Circuit Power Supply
Main Circuit Power Supply
Control Circuit Power Supply
Main Circuit Power Supply
SD
20
EM1
20
1
2
6
1
2
20
EM1
20
2
4
3
2
1
7
8
7
8
1
P5
LG
MRR2
MR2
LG
P5
MD2
MDR2
MD
MDR
SD
SD
CN11:5 10B
:1
:2
:3
:4
SD
24B1
SSCNET3(ch1)
Connector Case
:9
:8
:7
Robot Cable
Y-Axis Limit (-)
Y-Axis Contact Detection
1
2
1
2
1
2
1
2
24B1
24B1
24B1
24B124B1
24B1
10B
10B
10B
10B
10B
10B10B
10B
440
10B
:13
:5
:2
:4
:12
:10
:8
:15
:6
Linear Scale Head
(Converter)
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
Robot Cable
Linear Scale Head
(Converter)
Connector Case
15
8
7
1
3
4
2
5
6
MRR
MR
FG
5V
0V
0V
MDR
MD
5V
Connector Case
to A21R-X211A
SSCNET3(ch1)
1
2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
(/Phase A)
(/Phase B)
(Phase B)
(Phase A)