Program.x200.pdf - 第107页
*4 *4 *4 *4 *4 Unit P.C.B. B.B.R( Unit P.C.B. B.B.R( Unit P.C.B. B.B.R( Unit P.C.B. B.B.R( Unit P.C.B. B.B.R( 㒙ঢ়ාᵔϢ㡄ẕ⌠ 㒙ঢ়ාᵔϢ㡄ẕ⌠ 㒙ঢ়ාᵔϢ㡄ẕ⌠ 㒙ঢ়ාᵔϢ㡄ẕ⌠ 㒙ঢ়ාᵔϢ㡄ẕ⌠ ) ) ) ) ) Mode( Mode( Mode( Mode( Mode( ࡴ㛒䗞ᢾ ࡴ㛒䗞ᢾ ࡴ㛒䗞ᢾ ࡴ㛒䗞ᢾ ࡴ㛒䗞ᢾ …
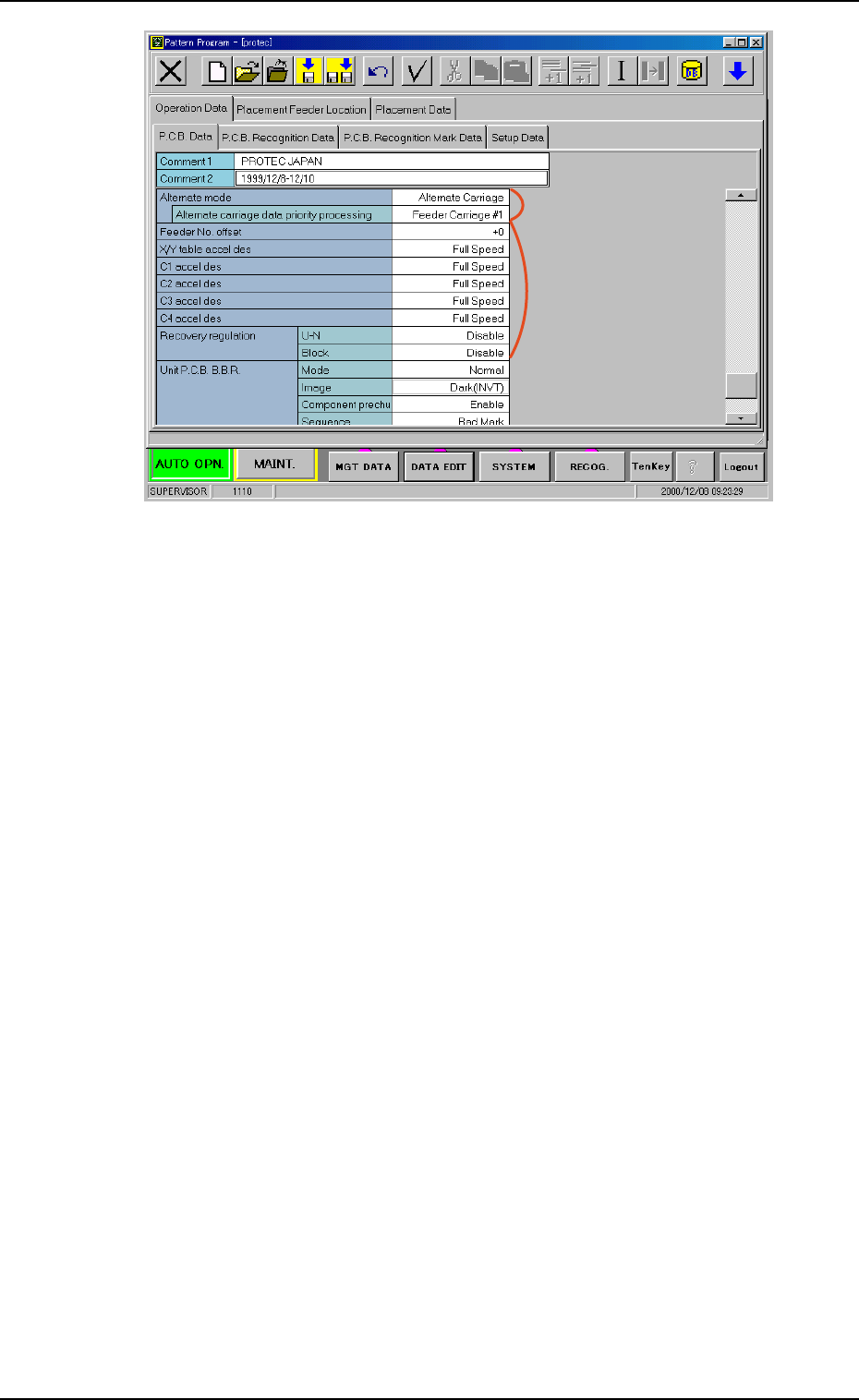
Fig.3B 47Fig.3B 47
Fig.3B 47Fig.3B 47
Fig.3B 47 “
P.C.B.DataP.C.B.Data
P.C.B.DataP.C.B.Data
P.C.B.Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
*2*2
*2*2
*2
Alternate mode(Alternate mode(
Alternate mode(Alternate mode(
Alternate mode(
᳔ᤷࡴ㛒ᣜᅯ᳔ᤷࡴ㛒ᣜᅯ
᳔ᤷࡴ㛒ᣜᅯ᳔ᤷࡴ㛒ᣜᅯ
᳔ᤷࡴ㛒ᣜᅯ
))
))
)
ᕕ᭜ᴁḛ䞡䕨ܺᭅȢ
Alternate carriage data priority processingAlternate carriage data priority processing
Alternate carriage data priority processingAlternate carriage data priority processing
Alternate carriage data priority processing
((
((
(
पԢ᳔ᤷӭܝ乏ᑤᣜᅯपԢ᳔ᤷӭܝ乏ᑤᣜᅯ
पԢ᳔ᤷӭܝ乏ᑤᣜᅯपԢ᳔ᤷӭܝ乏ᑤᣜᅯ
पԢ᳔ᤷӭܝ乏ᑤᣜᅯ
))
))
)
䆓ᅯ Alternate mode(᳔ᤷࡴ㛒)Џ “Alternate carriage
( पԢ᳔ᤷ) ” ᯋͼᡟᭅ䕨ܺࠅℹ᭜ᴁḛ䞡Ȣ
*3*3
*3*3
*3
Feeder No.offset(Feeder No.offset(
Feeder No.offset(Feeder No.offset(
Feeder No.offset(
ܘӋ䜢㕃ܘӋ䜢㕃
ܘӋ䜢㕃ܘӋ䜢㕃
ܘӋ䜢㕃
Offset), X/Y tableOffset), X/Y table
Offset), X/Y tableOffset), X/Y table
Offset), X/Y table
accel des(XYaccel des(XY
accel des(XYaccel des(XY
accel des(XY
ࡵ䗴ᑻᣜᅯࡵ䗴ᑻᣜᅯ
ࡵ䗴ᑻᣜᅯࡵ䗴ᑻᣜᅯ
ࡵ䗴ᑻᣜᅯ
), C accel des(), C accel des(
), C accel des(), C accel des(
), C accel des(
ࡵ䗴ᑻࡵ䗴ᑻ
ࡵ䗴ᑻࡵ䗴ᑻ
ࡵ䗴ᑻ
ᣜᅯᣜᅯ
ᣜᅯᣜᅯ
ᣜᅯ
), C2 accel des, C3 accel des, C4 accel), C2 accel des, C3 accel des, C4 accel
), C2 accel des, C3 accel des, C4 accel), C2 accel des, C3 accel des, C4 accel
), C2 accel des, C3 accel des, C4 accel
des, Recovery regulation(des, Recovery regulation(
des, Recovery regulation(des, Recovery regulation(
des, Recovery regulation(
ᘷ䰥ࠋᘷ䰥ࠋ
ᘷ䰥ࠋᘷ䰥ࠋ
ᘷ䰥ࠋ
))
))
)
ᕕ᭜ᴁḛ䞡䕨ܺᭅȢ
0107-001 2-88
4.34.3
4.34.3
4.3“
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
) ”
TabTab
TabTab
Tab
*3
*2
*4*4
*4*4
*4
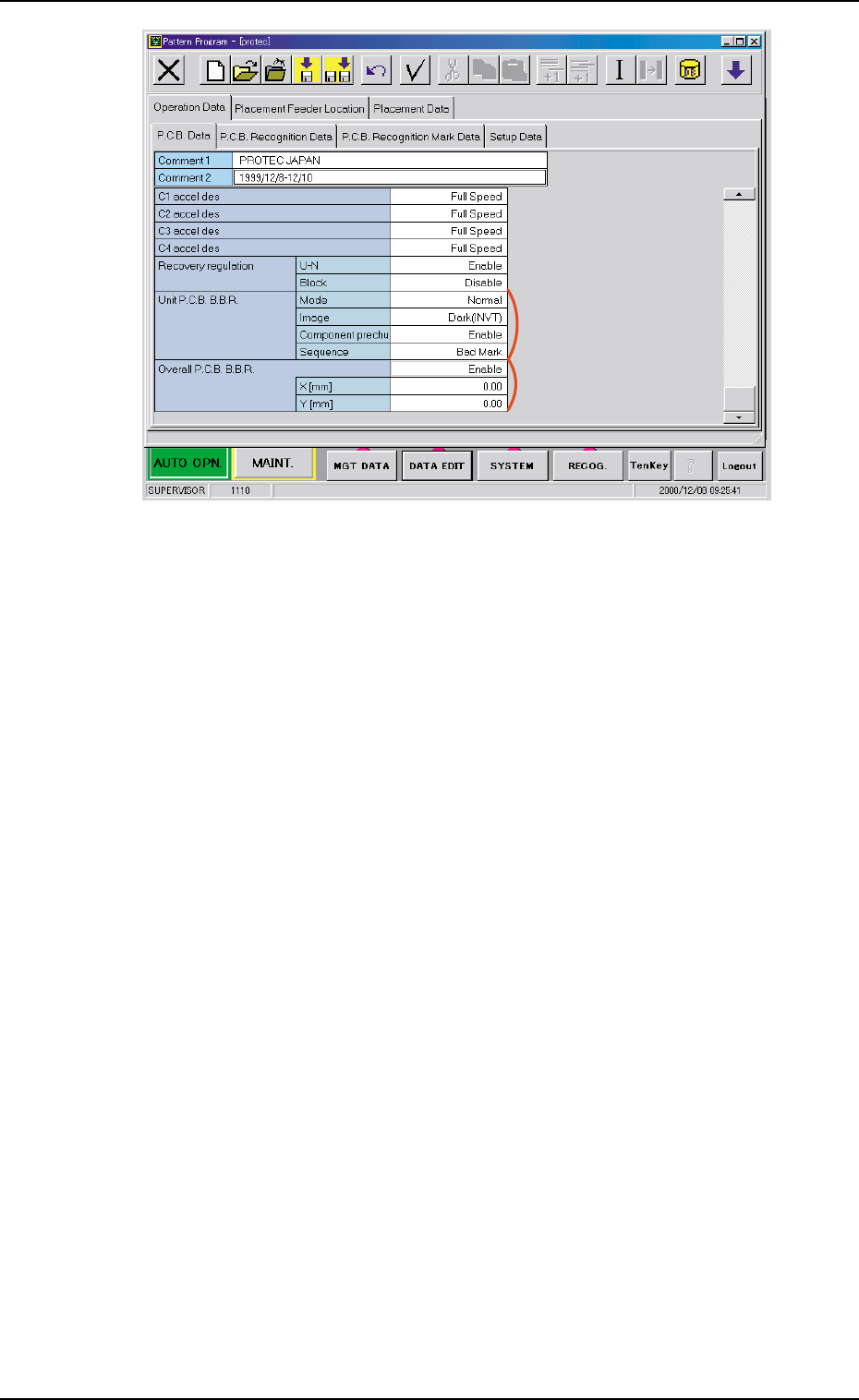
Unit P.C.B. B.B.R(Unit P.C.B. B.B.R(
Unit P.C.B. B.B.R(Unit P.C.B. B.B.R(
Unit P.C.B. B.B.R(
㒙ঢ়ාᵔϢ㡄ẕ⌠㒙ঢ়ාᵔϢ㡄ẕ⌠
㒙ঢ়ාᵔϢ㡄ẕ⌠㒙ঢ়ාᵔϢ㡄ẕ⌠
㒙ঢ়ාᵔϢ㡄ẕ⌠
))
))
)
Mode(Mode(
Mode(Mode(
Mode(
ࡴ㛒䗞ᢾࡴ㛒䗞ᢾ
ࡴ㛒䗞ᢾࡴ㛒䗞ᢾ
ࡴ㛒䗞ᢾ
))
))
)
᭜ᴁḛ䞡䕨ܺᭅȢ
Image(Image(
Image(Image(
Image(
ᷜ䆅ڤᷜ䆅ڤ
ᷜ䆅ڤᷜ䆅ڤ
ᷜ䆅ڤ
))
))
)
ȡȡ
ȡȡ
ȡ
Component Prechuck(Component Prechuck(
Component Prechuck(Component Prechuck(
Component Prechuck(
ܘӋܝফܘӋܝফ
ܘӋܝফܘӋܝফ
ܘӋܝফ
))
))
)
ȡȡ
ȡȡ
ȡ
Sequence(Sequence(
Sequence(Sequence(
Sequence(
乏ᑤ乏ᑤ
乏ᑤ乏ᑤ
乏ᑤ
))
))
)
ࡴ㛒䗞ᢾ䆓ᅯЏ䰹ћ “Disable(ϢՔ⫽) ” Рᯋℹ᭜ᴁ
ḛ䞡䕨ܺᭅȢ
*5*5
*5*5
*5
Overall P.C.B. B.B.R(Overall P.C.B. B.B.R(
Overall P.C.B. B.B.R(Overall P.C.B. B.B.R(
Overall P.C.B. B.B.R(
ᷜޛϢ㡄ẕ⌠ᷜޛϢ㡄ẕ⌠
ᷜޛϢ㡄ẕ⌠ᷜޛϢ㡄ẕ⌠
ᷜޛϢ㡄ẕ⌠
))
))
)
᭜ᴁḛ䞡䕨ܺᭅȢ
X [mm](X [mm](
X [mm](X [mm](
X [mm](
),Y [mm](),Y [mm](
),Y [mm](),Y [mm](
),Y [mm](
㒊㒊
㒊㒊
㒊
))
))
)
䆓ᅯ Overall P.C.B. B.B.R(ᷜޛϢ㡄ẕ⌠)Џ “Enable(Ք
⫽) ” ᯋͼℹ᭜ᴁḛ䞡䕨ܺᭅȢ
Fig.3B 48 Fig.3B48
Fig.3B 48 Fig.3B48
Fig.3B 48 “
P.C.B. Data(P.C.B. Data(
P.C.B. Data(P.C.B. Data(
P.C.B. Data(
ාᵔᭅාᵔᭅ
ාᵔᭅාᵔᭅ
ාᵔᭅ
))
))
)”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
0107-001 2-89
4.34.3
4.34.3
4.3“
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
) ”
TabTab
TabTab
Tab
*4*4
*4*4
*4
*5*5
*5*5
*5
4.3.24.3.2
4.3.24.3.2
4.3.2 “
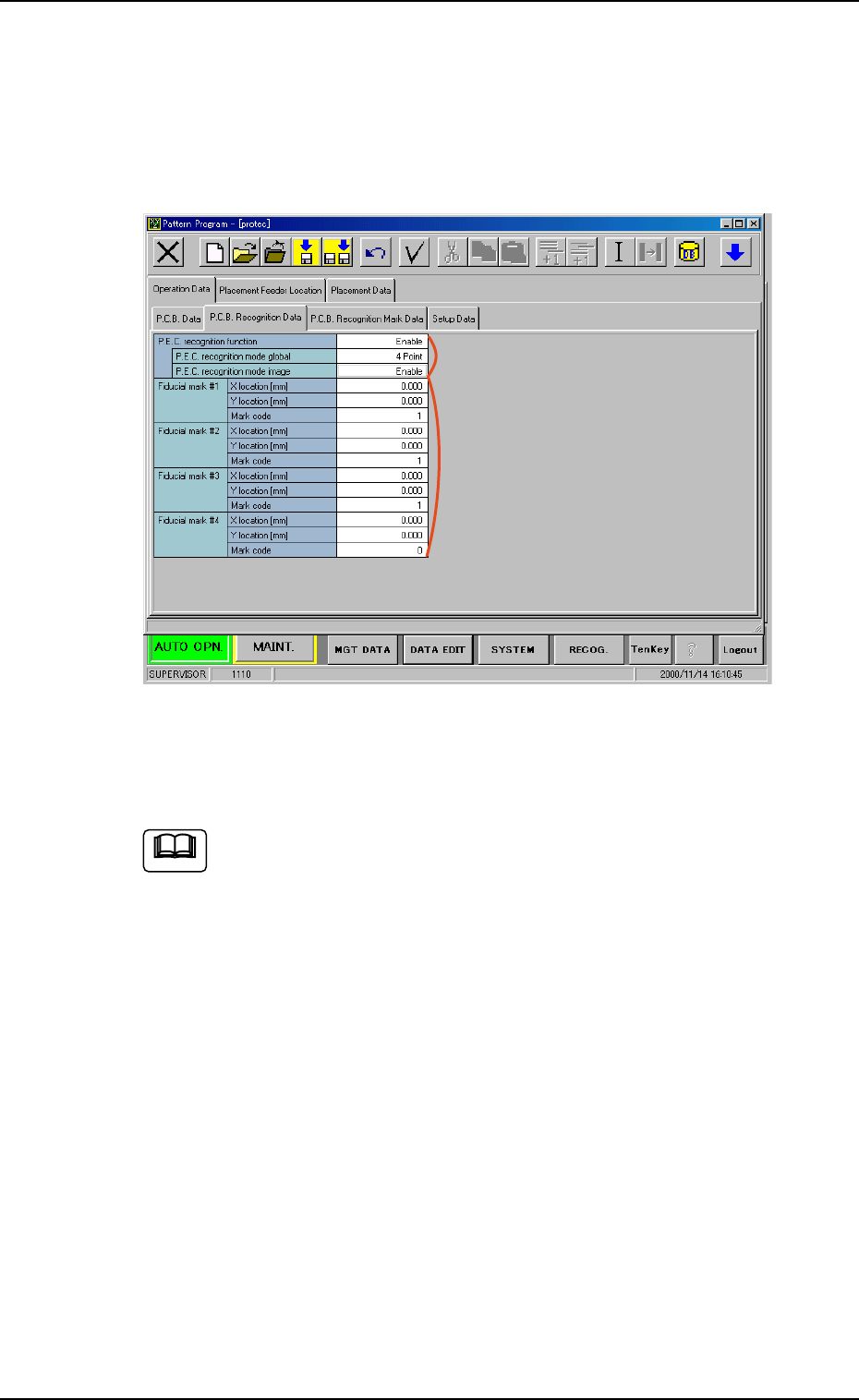
P.C.B. Recognition Data(P.C.B. Recognition Data(
P.C.B. Recognition Data(P.C.B. Recognition Data(
P.C.B. Recognition Data(
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅ
))
))
)”
TabTab
TabTab
Tab
• •
• •
•
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏
पߐ[Operation Data(᪢Աᭅ)] Tab 乊䴷Ђⱙ[P.C.B. Rec-
ognition Data(ාᵔ䆛ࠀᭅ)]Tabͼᰓ⼏བྷϠ Tab 乊䴷Ȣ
••
••
•
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥
᳞݈ᭅⱙ䕨ܺᮎ⊪ͼ䇌গ✼ “4.2 ᭜ᴁḛාᴁ᪢Ա ”Ȣ
* *
* *
*
P.E.C. recognition function(P.E.C. recognition function(
P.E.C. recognition function(P.E.C. recognition function(
P.E.C. recognition function(
ාᵔ䆛ࠀࡴ㛒䗞ᢾාᵔ䆛ࠀࡴ㛒䗞ᢾ
ාᵔ䆛ࠀࡴ㛒䗞ᢾාᵔ䆛ࠀࡴ㛒䗞ᢾ
ාᵔ䆛ࠀࡴ㛒䗞ᢾ
))
))
)
᭜ᴁḛ䕨ܺᭅȢ
P.E.C. recognition mode global(P.E.C. recognition mode global(
P.E.C. recognition mode global(P.E.C. recognition mode global(
P.E.C. recognition mode global(
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀ
))
))
)
䆓ᅯ P.E.C. recognition function(ාᵔ䆛ࠀࡴ㛒䗞ᢾ)
Џ “Enable(䆛ࠀ” ᯋͼᡟᭅ䕨ܺࠅℹ᭜ᴁḛ䞡Ȣ
P.E.C. recognition mode image(P.E.C. recognition mode image(
P.E.C. recognition mode image(P.E.C. recognition mode image(
P.E.C. recognition mode image(
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪
㒙ঢ়䆛ࠀ㒙ঢ়䆛ࠀ
㒙ঢ়䆛ࠀ㒙ঢ়䆛ࠀ
㒙ঢ়䆛ࠀ
))
))
)
䆓ᅯ P.E.C. recognition function(ාᵔ䆛ࠀࡴ㛒䗞ᢾ)
Џ “Enable(䆛ࠀ” ᯋͼᡟᭅ䕨ܺࠅℹ᭜ᴁḛ䞡Ȣ
*2*2
*2*2
*2
Global Recognition(Global Recognition(
Global Recognition(Global Recognition(
Global Recognition(
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀ
))
))
)
ᇎᑩ “P.E.C. recognition mode global(ාᵔ䆛ࠀᮎ⊪
ᭉԨ䆛ࠀ)” ⱙ䆛ࠀ⚎ᭅͼ “X location[mm]”ȡ“Y
location [mm]”ȡ “Mark code(㓫ⷖ)” 䕨ܺᭅȢ
Fig.3B49Fig.3B49
Fig.3B49Fig.3B49
Fig.3B49 “
P.C.B. Recognition DataP.C.B. Recognition Data
P.C.B. Recognition DataP.C.B. Recognition Data
P.C.B. Recognition Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
0107-001 2-90
4.34.3
4.34.3
4.3“
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
) ”
TabTab
TabTab
Tab
*1
*2
Note