Program.x200.pdf - 第20页
1.2 1.2 1.2 1.2 1.2 ᪢Աᭅⱙᵙ៥ ᪢Աᭅⱙᵙ៥ ᪢Աᭅⱙᵙ៥ ᪢Աᭅⱙᵙ៥ ᪢Աᭅⱙᵙ៥ ᰄܽ䴷ㅶ⧛ Pattern Program ⱙᭅȢ ℹᭅ⬆ P.C.B.Data( ාᵔᭅ ) ȡ P.C.B.Recognition Data( ාᵔ䆛ࠀᭅ ) ȡ P.C.B.Recognition Mark Data( ාᵔ䆛ࠀᷜ䆅ᭅ ) ȡ Setup Data( ᭅ ) ᵙ៥Ȣ 䆻㒛ݚᆎ䇌গ✼ “…
1.1.21.1.2
1.1.21.1.2
1.1.2
ᭅⱙ䕨ܺᮎ⊪ᭅⱙ䕨ܺᮎ⊪
ᭅⱙ䕨ܺᮎ⊪ᭅⱙ䕨ܺᮎ⊪
ᭅⱙ䕨ܺᮎ⊪
䇌গ✼ “ 4.Pattern Program ⬡䴷ⱙ᪢Աᮎ⊪ ” 䕨ܺᭅȢ
, 㓫㺚㕃( 䗞乎) ͼ䕨ܺᭅৣӵ䗖ࠅᴁ㺚㕃Ȣ
Pattern ProgramPattern Program
Pattern ProgramPattern Program
Pattern Program
ᭅपᭅप
ᭅपᭅप
ᭅप
䇌߾⫽ 6 㡗᠕䆅䕒ⱙ Pattern Program Ђⱙⱐ䆅⊽ݡ
पȢ
0107-001 2-2
Note
1.Pattern Program1.Pattern Program
1.Pattern Program1.Pattern Program
1.Pattern Program
ⱙⱙ
ⱙⱙ
ⱙ
ᵙ៥ᵙ៥
ᵙ៥ᵙ៥
ᵙ៥
1.21.2
1.21.2
1.2
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥
ᰄܽ䴷ㅶ⧛ Pattern Program ⱙᭅȢ
ℹᭅ⬆ P.C.B.Data(ාᵔᭅ)ȡP.C.B.Recognition Data(ාᵔ䆛ࠀᭅ)ȡ
P.C.B.Recognition Mark Data(ාᵔ䆛ࠀᷜ䆅ᭅ)ȡSetup Data(ᭅ)ᵙ៥Ȣ
䆻㒛ݚᆎ䇌গ✼ “2 㡗 2.3 Operation Data(᪢Աᭅ)” サ㡗Ȣ
A01A01
A01A01
A01
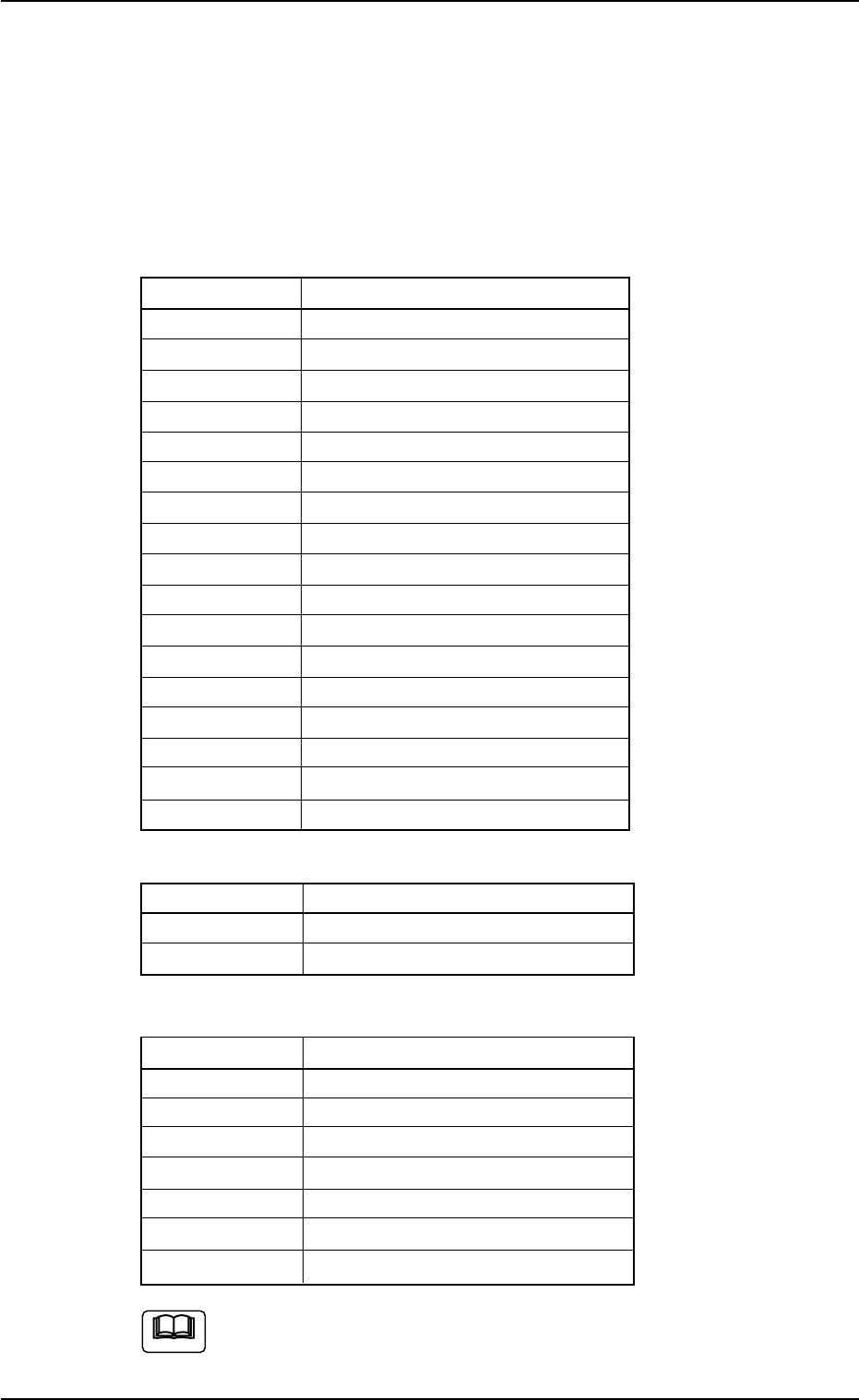
P.C.B.DataP.C.B.Data
P.C.B.DataP.C.B.Data
P.C.B.Data
Table 3B1Table 3B1
Table 3B1Table 3B1
Table 3B1
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃ
No.No.
No.No.
No.
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅
A01_01 Comment 1, 2
A01_02 P.C.B size
A01_03 P.C.B.origin offset
A01_04 P.C.B.height offset
A01_05 P.C.B.positioning reference
A01_06 Pre-Placed component thickness
A01_07 Placement mode
A01_08 P.C.B.transfer speed
A01_09 Placement data sorting
A01_10 Feeder standby position
A01_11 Alternate mode
A01_12 Feeder No.offset
A01_13 X/Y Table accel des
A01_14 C1, C2, C3, C4 accel des
A01_15 Recovery regulation
A01_16 Unit P.C.B. B.B.R
A01_17 Overall P.C.B. B.B.R
A02A02
A02A02
A02
P.C.B.Recognition DataP.C.B.Recognition Data
P.C.B.Recognition DataP.C.B.Recognition Data
P.C.B.Recognition Data
Table 3B2Table 3B2
Table 3B2Table 3B2
Table 3B2
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃ
No.No.
No.No.
No.
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅
A02_01 P.E.C.recognition function
A02_02 P.E.C.recognition mode global
A03A03
A03A03
A03
P.C.B.Recognition Mark DataP.C.B.Recognition Mark Data
P.C.B.Recognition Mark DataP.C.B.Recognition Mark Data
P.C.B.Recognition Mark Data
Table 3B3Table 3B3
Table 3B3Table 3B3
Table 3B3
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃ
No.No.
No.No.
No.
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅
A03_01 Mark #
A03_02 Mark Type
A03_07 Mark Size D1, D2, D3
A03_04 Window Size
A03_05 Mark Image
A03_06 Mark Level
A03_07 Recog Algo
䆻㒛ݚᆎ䇌গ✼ “(A03-08)P.C.B.Recognition Marks(ාᵔ
䆛ࠀᷜ䆅䇉ᯣ) ” サ㡗Ȣ
1.21.2
1.21.2
1.2
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥
Note
0107-001 2-3

A04A04
A04A04
A04
SetupSetup
SetupSetup
Setup
Data(Data(
Data(Data(
Data(
ᭅᭅ
ᭅᭅ
ᭅ
))
))
)
Table 3B4Table 3B4
Table 3B4Table 3B4
Table 3B4
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃগ✼乎ⳃ
গ✼乎ⳃ
No.No.
No.No.
No.
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅ᭅৢ⿅
ᭅৢ⿅
A04_01 L conveyor
A04_02 R conveyor
A04_03 X/Y table chute
A04_04 Support pin up/down
0107-001 2-4
1.21.2
1.21.2
1.2
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥᪢Աᭅⱙᵙ៥
᪢Աᭅⱙᵙ៥