Program.x200.pdf - 第260页
P.C.B.output buffer position( P.C.B.output buffer position( P.C.B.output buffer position( P.C.B.output buffer position( P.C.B.output buffer position( ාᵔᥧߏ ාᵔᥧߏ ාᵔᥧߏ ාᵔᥧߏ ාᵔᥧߏ Buffer Buffer Buffer Buffer Buffer Ԣ㕃 Ԣ㕃 Ԣ㕃 Ԣ…
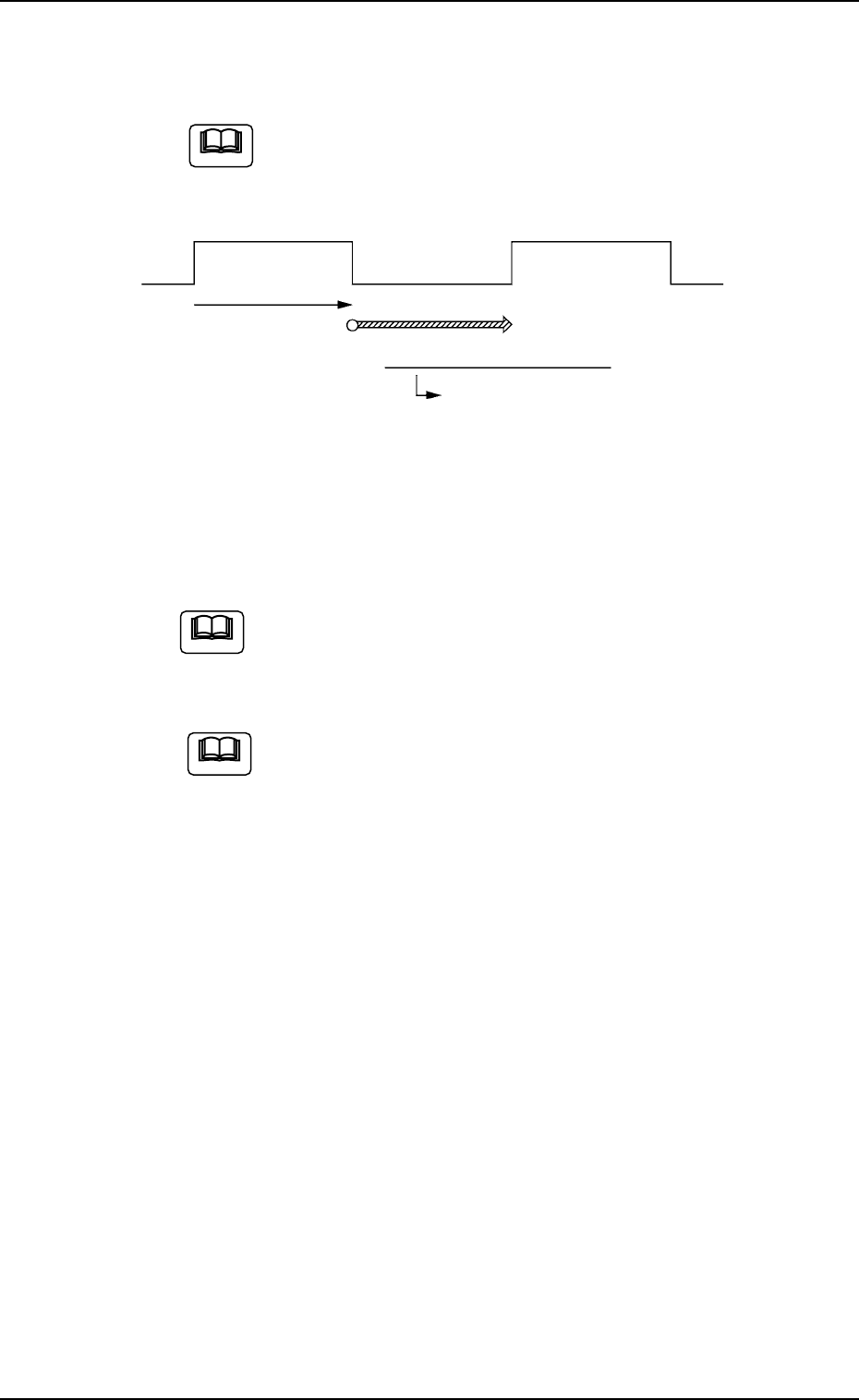
Output interval timer[sec]Output interval timer[sec]
Output interval timer[sec]Output interval timer[sec]
Output interval timer[sec]
০ৣᎺᑤⱙᥧߏᮎᓤ䆓ᅯĆ䯉䱩ćᯋͼ䇌䆓ᅯ㽖⹃ֲⱙᥧ
ߏ䯉䱩ᯋ䯉Ȣ
ᭅ䕨ܺ㣘Џ “099 ⾧ ”Ȣ
# of input buffer, # of output buffer:# of input buffer, # of output buffer:
# of input buffer, # of output buffer:# of input buffer, # of output buffer:
# of input buffer, # of output buffer:
# of input buffer(# of input buffer(
# of input buffer(# of input buffer(
# of input buffer(
հ㒮հ㒮
հ㒮հ㒮
հ㒮
Buffer Buffer
Buffer Buffer
Buffer
ᵯᭅᵯᭅ
ᵯᭅᵯᭅ
ᵯᭅ
))
))
)
䆓ᅯհ㒮ӵ䗖ᏻϟᕚᴏⱙාᵔᵯᭅȢ
䗞ᢾᥧߏӵ䗖ᏻⱙᵯᭅ ᵯ㗚 2 ᵯȢ
# of output buffer(# of output buffer(
# of output buffer(# of output buffer(
# of output buffer(
ᥧߏᥧߏ
ᥧߏᥧߏ
ᥧߏ
BufferBuffer
BufferBuffer
Buffer
ᵯᭅᵯᭅ
ᵯᭅᵯᭅ
ᵯᭅ
))
))
)
䆓ᅯᥧߏӵ䗖ᏻϟᕚᴏⱙාᵔᵯᭅȢ
䗞ᢾᥧߏӵ䗖ᏻⱙᵯᭅ ᵯ㗚 2 ᵯȢ
Remote modeRemote mode
Remote modeRemote mode
Remote mode
((
((
(
㺀▕⌐㺀▕⌐
㺀▕⌐㺀▕⌐
㺀▕⌐
))
))
)
ңϟ䖎ⱙ(PC)Ђ≶᳞ᬋࠅ “START” ࠢͼϢ䖰㸡০ XY ⱙාᵔ
⿐䕒Ȣ
Fig.3E43Fig.3E43
Fig.3E43Fig.3E43
Fig.3E43
0107-001 5-54
3.33.3
3.33.3
3.3“
Auto OperationAuto Operation
Auto OperationAuto Operation
Auto Operation
((
((
(
䖥䕁䖥䕁
䖥䕁䖥䕁
䖥䕁
Paramater)Paramater)
Paramater)Paramater)
Paramater)”
TabTab
TabTab
Tab
Note
ᥧߏ Conveyor ON
ϠϕϿාᵔⱙᥧߏ
⫽ᥧߏ Conveyor
Timer ㅶ⧛
ᥧߏ Interval Timer
ࠋԱࠅϠϕϿාᵔᥧߏⱙ
Interval
Ȣ
Note
Note
P.C.B.output buffer position(P.C.B.output buffer position(
P.C.B.output buffer position(P.C.B.output buffer position(
P.C.B.output buffer position(
ාᵔᥧߏාᵔᥧߏ
ාᵔᥧߏාᵔᥧߏ
ාᵔᥧߏ
BufferBuffer
BufferBuffer
Buffer
Ԣ㕃Ԣ㕃
Ԣ㕃Ԣ㕃
Ԣ㕃
))
))
)
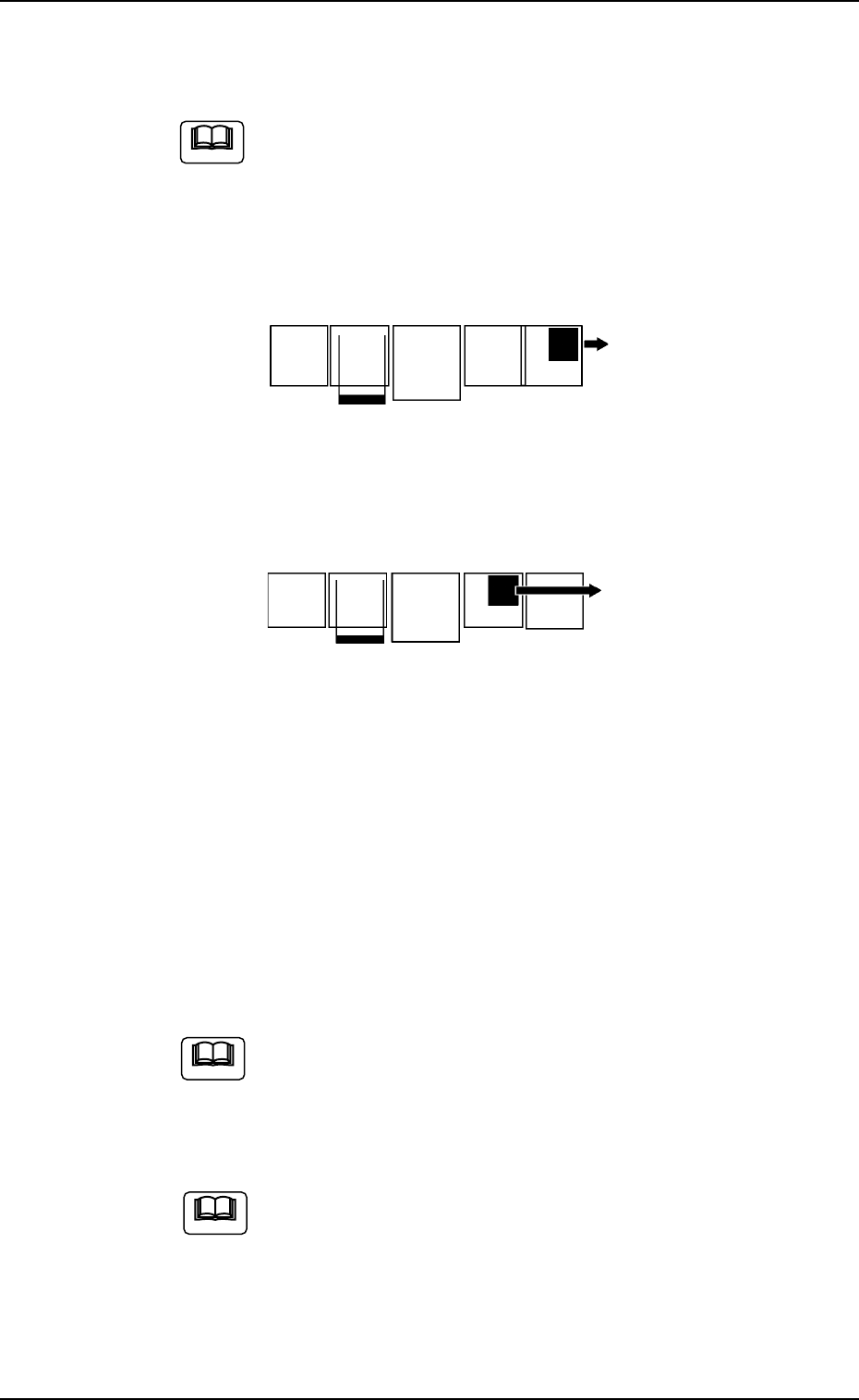
䆓ᅯාᵔӵ䗖ࡽԱⱙාᵔ㓨އԢ㕃Џ “Outlet(ߏস) ”
“Middle(Ђ䯉)”Ȣ
Fig.3E44 ȡFig.3E45 䇉ᯣ “ ාᵔ⌖ࡽңᎻࠅৈ ”Ȣ
“ ාᵔ⌖ࡽңৈࠅᎻ ” ϣ䖰㸡ⳍঢⱙࡽԱȢ
䆓ᅯ䆓ᅯ
䆓ᅯ䆓ᅯ
䆓ᅯ “
OutletOutlet
OutletOutlet
Outlet”
ᯋⱙࡽԱᯋⱙࡽԱ
ᯋⱙࡽԱᯋⱙࡽԱ
ᯋⱙࡽԱ
䆓ᅯ䆓ᅯ
䆓ᅯ䆓ᅯ
䆓ᅯ “
MiddleMiddle
MiddleMiddle
Middle”
ᯋⱙࡽԱᯋⱙࡽԱ
ᯋⱙࡽԱᯋⱙࡽԱ
ᯋⱙࡽԱ
Bar code program change modeBar code program change mode
Bar code program change modeBar code program change mode
Bar code program change mode
(Barcode(Barcode
(Barcode(Barcode
(Barcode
ᴏ⾢ߜᤷࡴ㛒ᴏ⾢ߜᤷࡴ㛒
ᴏ⾢ߜᤷࡴ㛒ᴏ⾢ߜᤷࡴ㛒
ᴏ⾢ߜᤷࡴ㛒
))
))
)
( (
( (
(
㺀▕⌐㺀▕⌐
㺀▕⌐㺀▕⌐
㺀▕⌐
))
))
)
䆓ᅯ Barcode ᴏ⾢ߜᤷࡴ㛒 “Enable”, “Disable”Ȣ
Unit P.C.B. B.B.R. ModeUnit P.C.B. B.B.R. Mode
Unit P.C.B. B.B.R. ModeUnit P.C.B. B.B.R. Mode
Unit P.C.B. B.B.R. Mode
( (
( (
(
㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
) () (
) () (
) (
㺀▕⌐㺀▕⌐
㺀▕⌐㺀▕⌐
㺀▕⌐
))
))
)
䆓ᅯ㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒㺚㕃ݚẕ⌠䖭ᰄӵ䗖ᏻϟẕ⌠Ȣ
䆓ᅯ “Standard(ᷜޛ)”, “Conveyor”Ȣ
X/Y conveyor reverse strokeX/Y conveyor reverse stroke
X/Y conveyor reverse strokeX/Y conveyor reverse stroke
X/Y conveyor reverse stroke
((
((
(
XY Conveyor XY Conveyor
XY Conveyor XY Conveyor
XY Conveyor
䗛䕁䗛䕁
䗛䕁䗛䕁
䗛䕁
StrokeStroke
StrokeStroke
Stroke
) [mm]) [mm]
) [mm]) [mm]
) [mm]
䆓ᅯ⒦ῒϠ䰥Ђᇎාᵔ X ᮎ০ⱙϠॠ䞤Ȣ
ҺՔ⫽(Offset)ЏࠢᦥȢ
Y clamping[mm]Y clamping[mm]
Y clamping[mm]Y clamping[mm]
Y clamping[mm]
䆓ᅯ⒦ῒϠ䰥Ђᇎාᵔ X ᮎ০ⱙϠॠ䞤Ȣ
ҺՔ⫽(Offset)ЏࠢᦥȢ
Fig.3E44Fig.3E44
Fig.3E44Fig.3E44
Fig.3E44
Fig.3E45Fig.3E45
Fig.3E45Fig.3E45
Fig.3E45
0107-001 5-55
3.33.3
3.33.3
3.3“
Auto OperationAuto Operation
Auto OperationAuto Operation
Auto Operation
((
((
(
䖥䕁䖥䕁
䖥䕁䖥䕁
䖥䕁
Paramater)Paramater)
Paramater)Paramater)
Paramater)”
TabTab
TabTab
Tab
Note
Note
Note
հ㒮䚽 ⿐䕒䚽
Table 䚽
ᥧߏ䚽
հ㒮䚽 ⿐䕒䚽
Table 䚽 ᥧߏ䚽
P.C.B. clamp mode selectP.C.B. clamp mode select
P.C.B. clamp mode selectP.C.B. clamp mode select
P.C.B. clamp mode select
䆓ᅯ P.C.B. Clamp Timer “Low Limit Start(Ϡ䰥ᓕྠ)”,
“Upper Limit Start(ϟ䰥ᓕྠ)”Ȣ
P.C.B. clamp timer [sec]P.C.B. clamp timer [sec]
P.C.B. clamp timer [sec]P.C.B. clamp timer [sec]
P.C.B. clamp timer [sec]
䆓ᅯ P.C.B. Clamp Timer ⱙᯋ䯉Ȣ
0107-001 5-56
3.33.3
3.33.3
3.3“
Auto OperationAuto Operation
Auto OperationAuto Operation
Auto Operation
((
((
(
䖥䕁䖥䕁
䖥䕁䖥䕁
䖥䕁
Paramater)Paramater)
Paramater)Paramater)
Paramater)”
TabTab
TabTab
Tab