Program.x200.pdf - 第27页
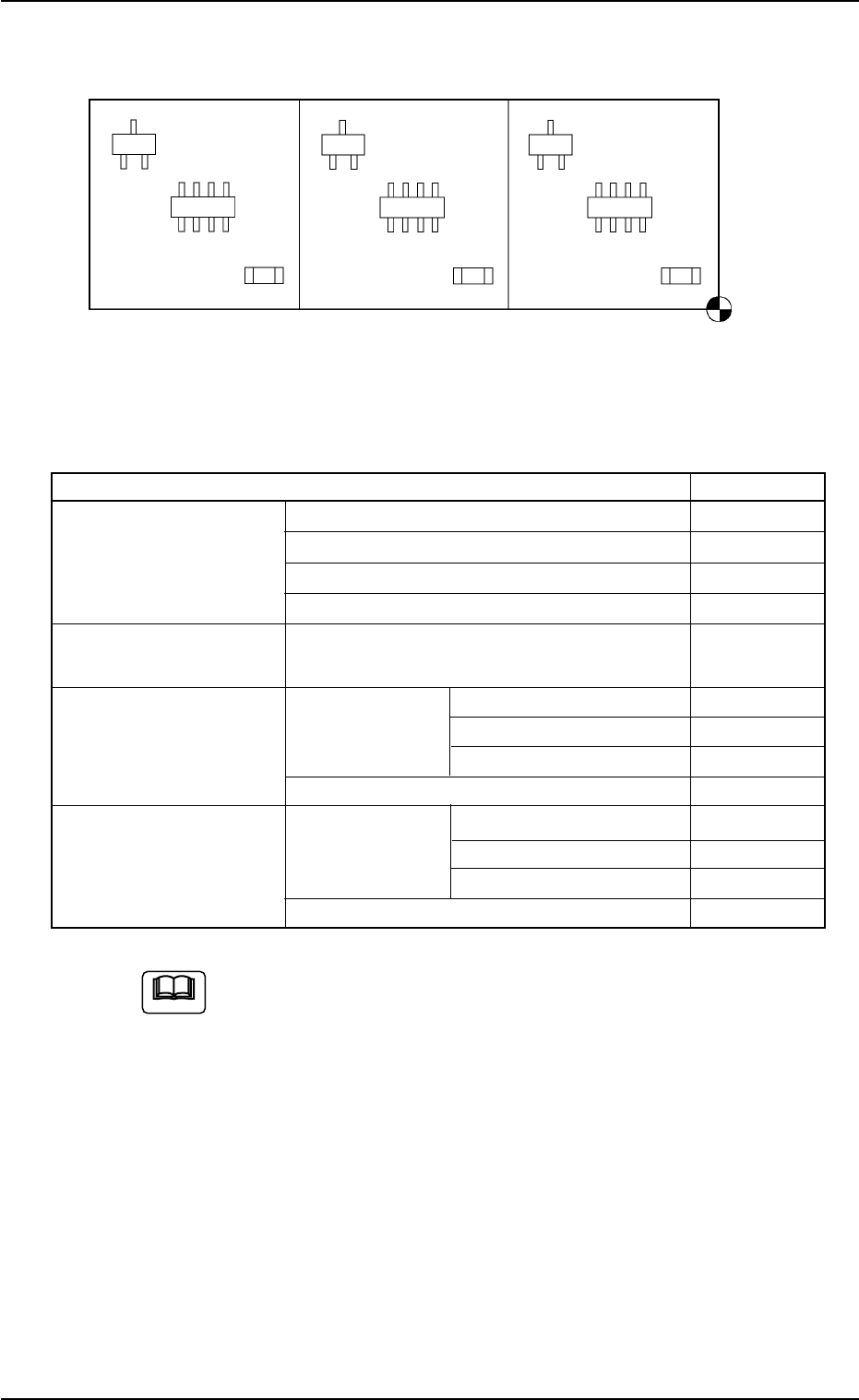
(4) (4) (4) (4) (4) 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ ( ( ( ( ( ᳞㒙ঢ়䆛ࠀ ᳞㒙ঢ়䆛ࠀ ᳞㒙ঢ়䆛ࠀ ᳞㒙ঢ়䆛ࠀ ᳞㒙ঢ়䆛ࠀ ) ) ) ) ) Fig.3B5 Fig.3B5 Fig.3B5 Fig.3B5 Fig.3B5 ාᴁᭅϕ㾝 ාᴁᭅϕ㾝 ාᴁᭅϕ㾝 ාᴁᭅϕ㾝 ාᴁᭅϕ㾝 Table 3B 2 Table 3B 2 Table 3B 2 T…
0107-001 2-9
(3)(3)
(3)(3)
(3)
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
Fig.3B4Fig.3B4
Fig.3B4Fig.3B4
Fig.3B4
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝
Table 3BTable 3B
Table 3BTable 3B
Table 3B
Pattern ProgramPattern Program
Pattern ProgramPattern Program
Pattern Program
ාᴁᭅාᴁᭅ
ාᴁᭅාᴁᭅ
ාᴁᭅ
Operation Data P.C.B.Data ̺
P.C.B.Recognition Data Ý
P.C.B.Recognition Mark Data Ý
Setup Data Note(a)
Placement Feeder Feeeder Carriages ώ4 ̺
Location Data
Placement Data U0 Placement Data Placement Data
(
P
Data)
̺
(P Data) Unit Control Note(b)
Unit P.C.B.B.B.R Ý
Placement Data (0 Data) ̺
Placement Data Un Placement Data Placement Data
(
P
Data)
Ý
Unit Control Ý
Unit P.C.B.B.B.R Ý
Placement Data (0 Data) Ý
(a) 㞿ࡽ䇘ᭉӵ䗖ᏻᆒᐚȡ᭱ῒᆒᐚᯋ, 㓫ࠋℹᭅȢ
(b) ḎᚚފՔ⫽Ȣ
Note
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
2.2.
2.2.
2.
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
ාᵔ⾢㉐ාᴁᭅ
(4)(4)
(4)(4)
(4)
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
( (
( (
(
᳞㒙ঢ়䆛ࠀ᳞㒙ঢ়䆛ࠀ
᳞㒙ঢ়䆛ࠀ᳞㒙ঢ়䆛ࠀ
᳞㒙ঢ়䆛ࠀ
))
))
)
Fig.3B5Fig.3B5
Fig.3B5Fig.3B5
Fig.3B5
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝
Table 3B2Table 3B2
Table 3B2Table 3B2
Table 3B2
Pattern ProgramPattern Program
Pattern ProgramPattern Program
Pattern Program
ාᴁᭅාᴁᭅ
ාᴁᭅාᴁᭅ
ාᴁᭅ
Operation Data P.C.B.Data ̺
P.C.B.Recognition Data ̺
P.C.B.Recognition Mark Data ̺
Setup Data Note(a)
Placement Feeder Feeeder Carriages ώ4 ̺
Location Data
Placement Data U0 Placement Data Placement Data
(
P
Data)
̺
(P Data) Unit Control Note(b)
Unit P.C.B.B.B.R ̺
Placement Data (0 Data) ̺
Placement Data Un Placement Data Placement Data
(
P
Data)
Ý
Unit Control Ý
Unit P.C.B.B.B.R Ý
Placement Data (0 Data) Ý
(a) 㞿ࡽ䇘ᭉӵ䗖ᏻᆒᐚȡ᭱ῒᆒᐚᯋ, 㓫ࠋℹᭅȢ
(b) ḎᚚފՔ⫽Ȣ
0107-001 2-10
Note
2.2.
2.2.
2.
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
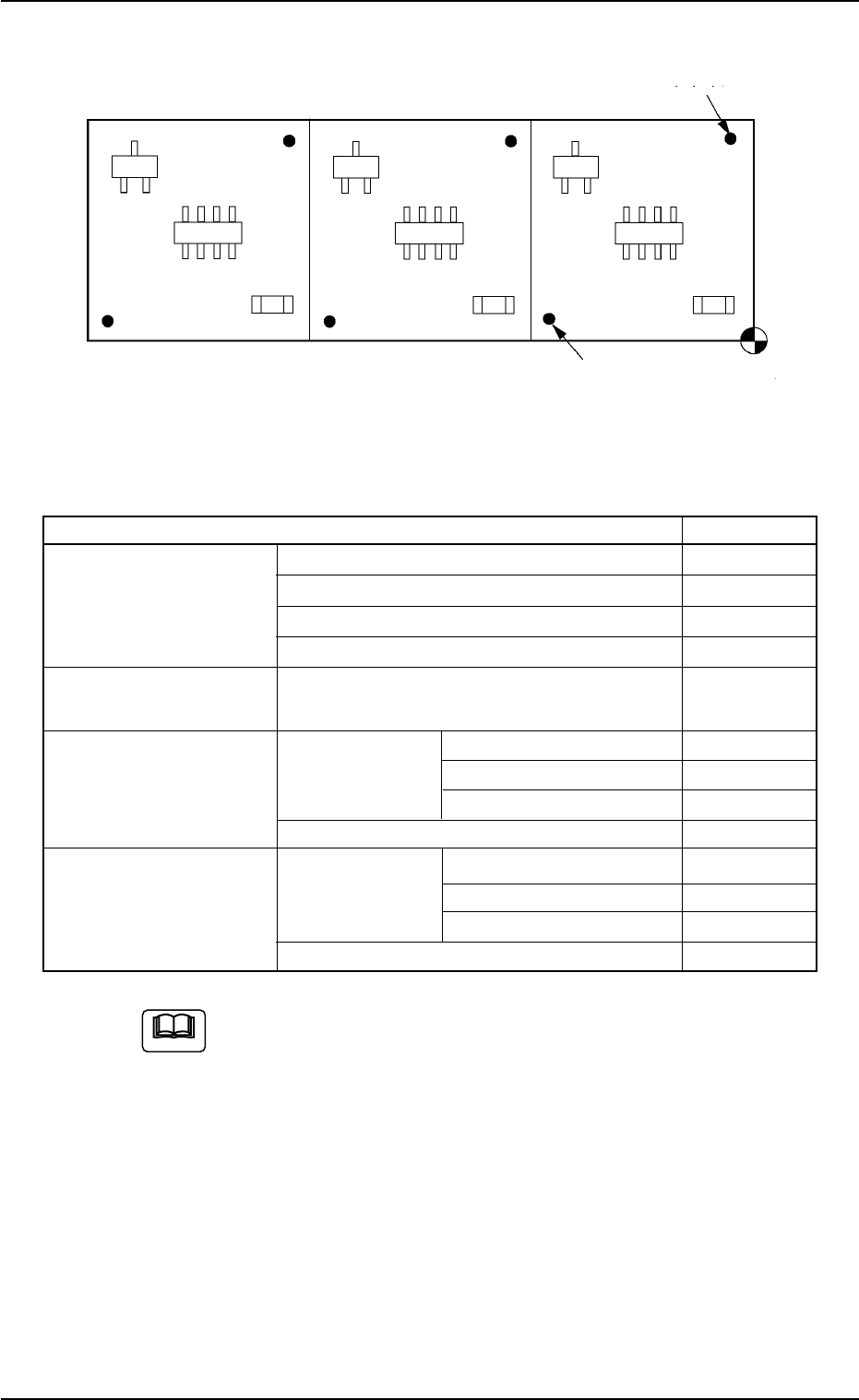
ාᵔ⾢㉐ාᴁᭅ
P.C.B. Recognition MarkP.C.B. Recognition Mark
P.C.B. Recognition MarkP.C.B. Recognition Mark
P.C.B. Recognition Mark
P.C.B. Recognition MarkP.C.B. Recognition Mark
P.C.B. Recognition MarkP.C.B. Recognition Mark
P.C.B. Recognition Mark
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
((
((
(
ාᵔ䆛ࠀාᵔ䆛ࠀ
ාᵔ䆛ࠀාᵔ䆛ࠀ
ාᵔ䆛ࠀ
Mark)Mark)
Mark)Mark)
Mark)
0107-001 2-11
(5)(5)
(5)(5)
(5)
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
))
))
)
Unit P.C.B.B.B.R.Detection MarkUnit P.C.B.B.B.R.Detection Mark
Unit P.C.B.B.B.R.Detection MarkUnit P.C.B.B.B.R.Detection Mark
Unit P.C.B.B.B.R.Detection Mark
Fig.3B6Fig.3B6
Fig.3B6Fig.3B6
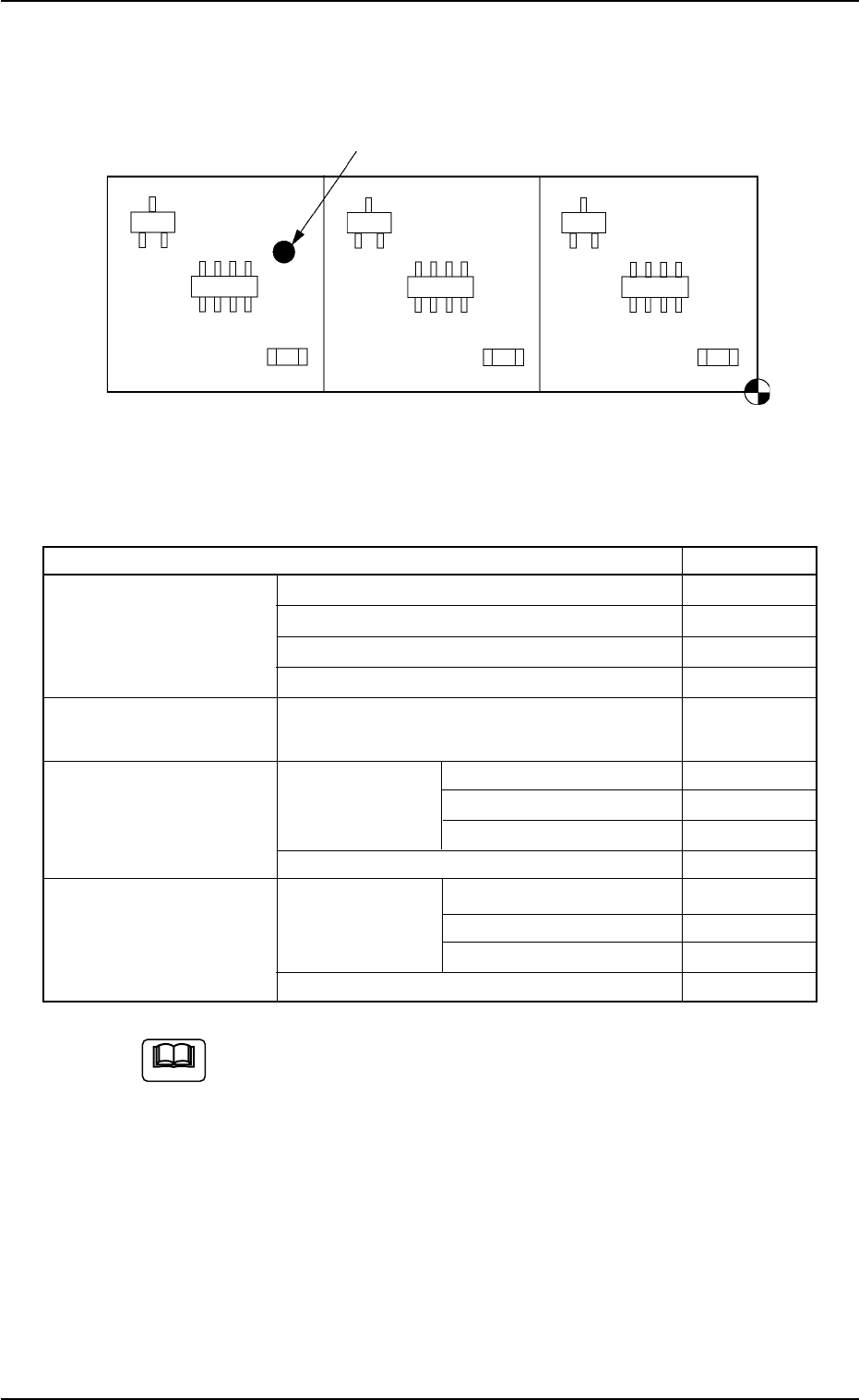
Fig.3B6
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝ාᴁᭅϕ㾝
ාᴁᭅϕ㾝
Table 3B3 Table 3B3
Table 3B3 Table 3B3
Table 3B3
Pattern ProgramPattern Program
Pattern ProgramPattern Program
Pattern Program
ාᴁᭅාᴁᭅ
ාᴁᭅාᴁᭅ
ාᴁᭅ
Operation Data P.C.B.Data ̺
P.C.B.Recognition Data Ý
P.C.B.Recognition Mark Data Ý
Setup Data Note(a)
Placement Feeder Feeeder Carriages ώ4 ̺
Location Data
Placement Data U0 Placement Data Placement Data
(
P
Data)
̺
(P Data) Unit Control Note(b)
Unit P.C.B.B.B.R Ý
Placement Data (0 Data) ̺
Placement Data Un Placement Data Placement Data
(
P
Data)
Ý
Unit Control Ý
Unit P.C.B.B.B.R Ý
Placement Data (0 Data) Ý
(a) 㞿ࡽ䇘ᭉӵ䗖ᏻᆒᐚȡ᭱ῒᆒᐚᯋ, 㓫ࠋℹᭅȢ
(b) ḎᚚފՔ⫽Ȣ
Note
2.2.
2.2.
2.
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
ාᵔ⾢㉐ාᴁᭅාᵔ⾢㉐ාᴁᭅ
ාᵔ⾢㉐ාᴁᭅ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
((
((
(
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠
Mark)(BadMark)(Bad
Mark)(BadMark)(Bad
Mark)(Bad
Mark)Mark)
Mark)Mark)
Mark)