Program.x200.pdf - 第51页
(A03_07)Recog Algo( (A03_07)Recog Algo( (A03_07)Recog Algo( (A03_07)Recog Algo( (A03_07)Recog Algo( 䆛ࠀ 䆛ࠀ 䆛ࠀ 䆛ࠀ 䆛ࠀ Algolithm) Algolithm) Algolithm) Algolithm) Algolithm) ԱЏා⠝䆛ࠀ Algorithm 䗞ᢾ “ Pattern match( Ḍᵔᔷ䗞䜢 ) ” …
(A03_04)Window Size(A03_04)Window Size
(A03_04)Window Size(A03_04)Window Size
(A03_04)Window Size
[mm][mm]
[mm][mm]
[mm]
((
((
(
䆛ࠀ乛ප䆛ࠀ乛ප
䆛ࠀ乛ප䆛ࠀ乛ප
䆛ࠀ乛ප
))
))
)
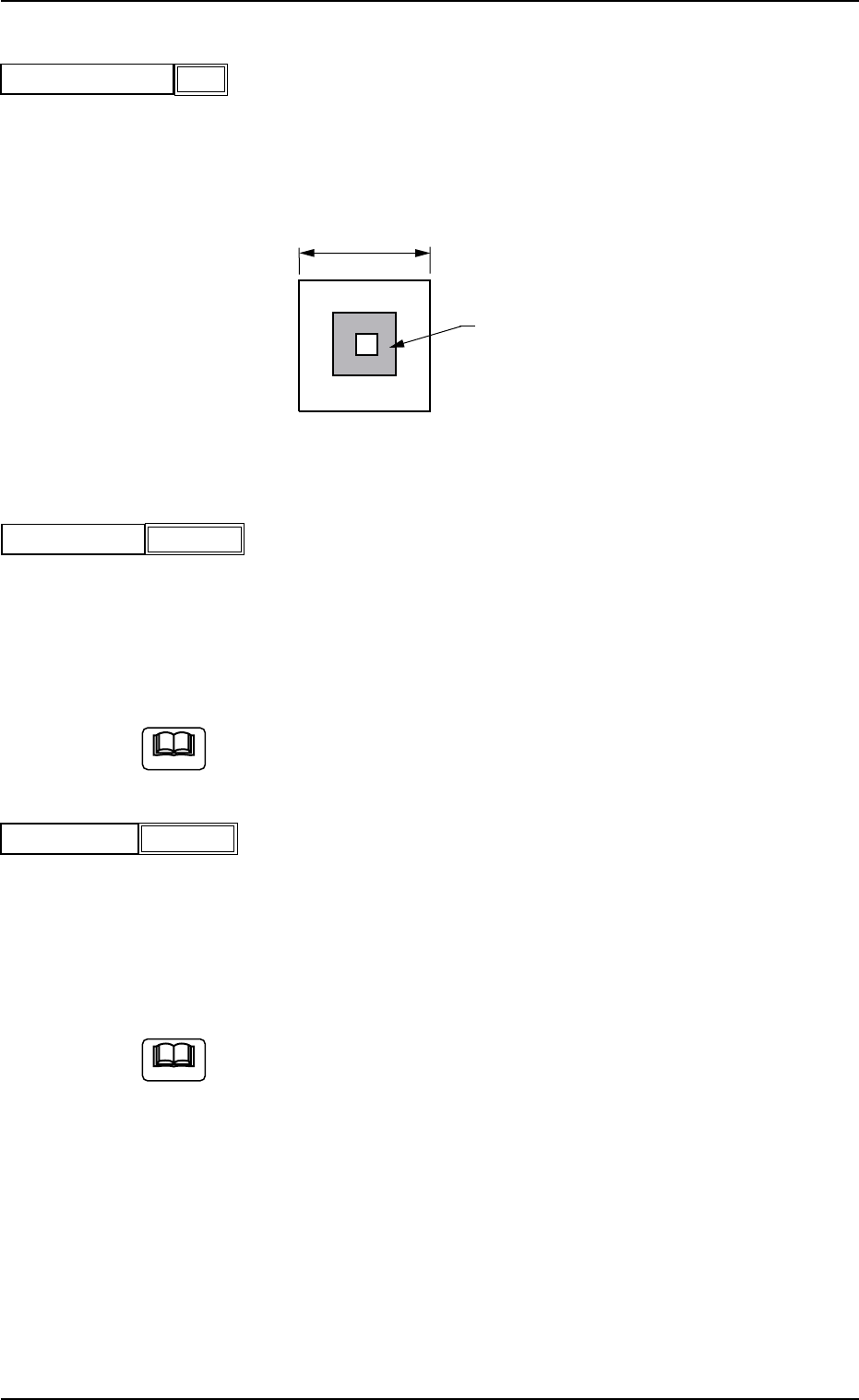
䆓ᅯාᵔ䆛ࠀⱙ䆛ࠀ乛පȢ
㒊ȡⳍৡሏᇍȢ
पԢ : mm
Џ䰇ℷ䇄䆛ࠀͼ㓾ⷂ䆛ࠀᯋ䯉ͼ䆓ᅯؑ㽖ሒ䞤ᇤȢ
Fig.3B62Fig.3B62
Fig.3B62Fig.3B62
Fig.3B62
(A03_05)Mark Image((A03_05)Mark Image(
(A03_05)Mark Image((A03_05)Mark Image(
(A03_05)Mark Image(
ᷜ䆅ڤᷜ䆅ڤ
ᷜ䆅ڤᷜ䆅ڤ
ᷜ䆅ڤ
))
))
)
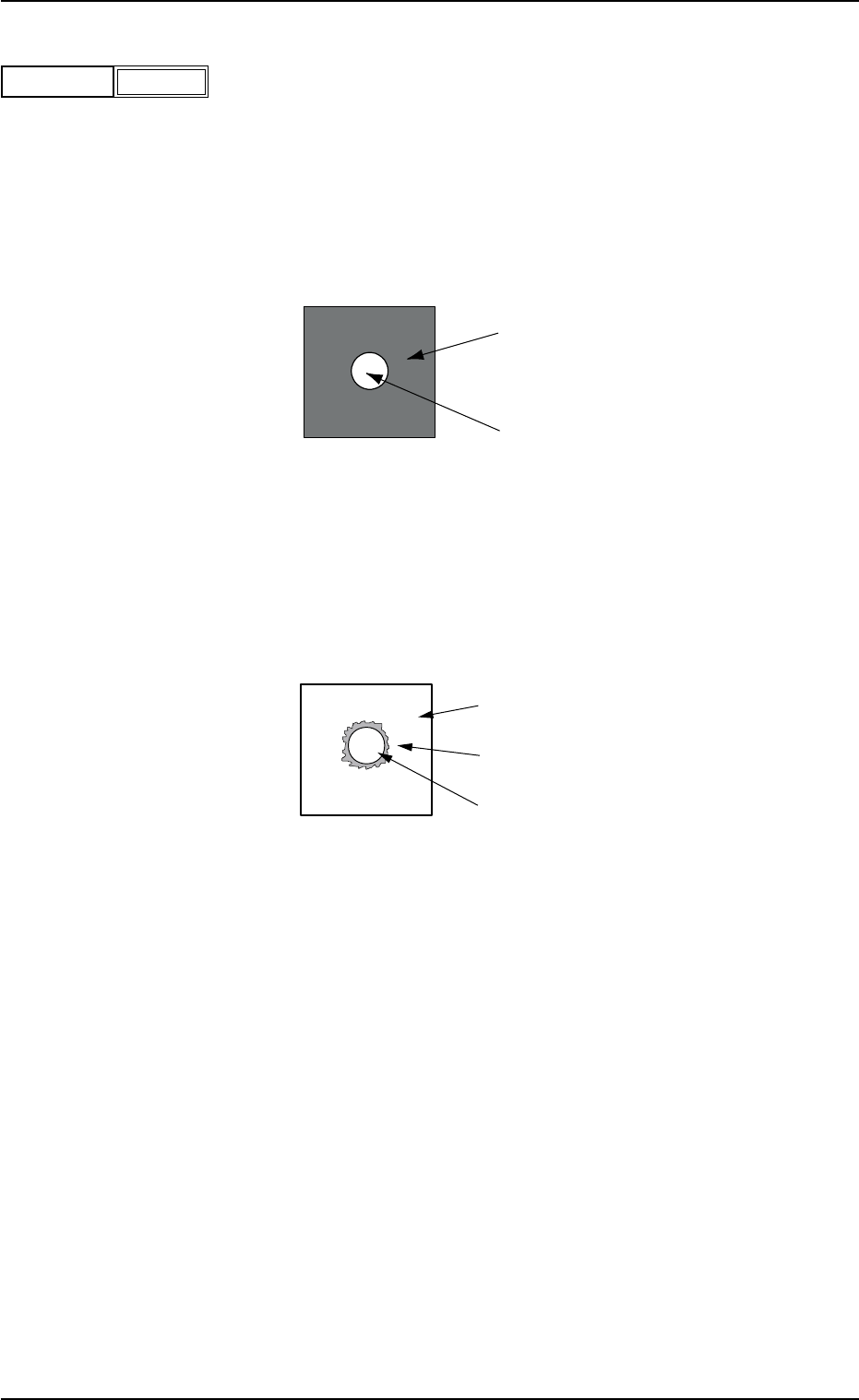
ңҺϠ䗞ᢾ Camera ⬐䴷Ђᷜ䆅ᔷⱙڤȢ
䆓ᅯᯋ㽖㗘㰦ᷜ䆅ᔷϣ䚽ߛⱙᯣᱬᑻͼՔ䆛ࠀᷜ䆅㛒ᕝ
དྷഅᰓ⼏ߏᴺȢ
Bright(Bright(
Bright(Bright(
Bright(
ᷜ䆅ᯣᷜ䆅ᯣ
ᷜ䆅ᯣᷜ䆅ᯣ
ᷜ䆅ᯣ
))
))
)
㚡᱄ᱬͼ䆛ࠀᷜ䆅҃ᯋՔ⫽Ȣ
Dark(Dark(
Dark(Dark(
Dark(
ᷜ䆅ᱬᷜ䆅ᱬ
ᷜ䆅ᱬᷜ䆅ᱬ
ᷜ䆅ᱬ
))
))
)
㚡᱄҃ͼ䆛ࠀᷜ䆅ᱬᯋՔ⫽Ȣ
ᓙ䫮ᷜ䆅ڤᯋͼ᮵⊪䖰㸡ℸᐍⱙ䆛ࠀࡽԱȢ
(A03_06)Mark Level((A03_06)Mark Level(
(A03_06)Mark Level((A03_06)Mark Level(
(A03_06)Mark Level(
ᔷ⢋߹ᅯ∉ᑈᔷ⢋߹ᅯ∉ᑈ
ᔷ⢋߹ᅯ∉ᑈᔷ⢋߹ᅯ∉ᑈ
ᔷ⢋߹ᅯ∉ᑈ
))
))
)
䆓ᅯ䆛ࠀᷜ䆅ⱙᔷ⢋߹ᅯ∉ᑈᭅȢ
High(High(
High(High(
High(
傭傭
傭傭
傭
))
))
)
傭∉ᑈ߹ᅯ䆛ࠀᷜ䆅ⱙᔷ⢋ϕ㟉ᑻ / ⳍԑᑻȢ
Middle(Middle(
Middle(Middle(
Middle(
ЂЂ
ЂЂ
Ђ
))
))
)
Ђ∉ᑈ߹ᅯ䆛ࠀᷜ䆅ⱙᔷ⢋ϕ㟉ᑻ / ⳍԑᑻЂ
ӐᛤϕᮎȢ
Low(Low(
Low(Low(
Low(
ԣԣ
ԣԣ
ԣ
))
))
)
ԣ∉ᑈ߹ᅯ䆛ࠀᷜ䆅ⱙᔷ⢋ϕ㟉ᑻ / ⳍԑᑻȢ
(a) ᔷ⢋ϕ㟉ᑻ
ᰄᣜᣜᅯⱙᷜ䆅ᭅᅳڤ( ᇤ) Р䯉ⱙᔷ⢋ϕ㟉ᑻȢ
(b) ᔷ⢋ⳍԑᑻ
ᰄᣜᣜᅯⱙᷜ䆅ᭅᅳڤР䯉ⱙᔷ⢋ⳍԑᑻȢ
Bright
Mark Image
Fig.3B63Fig.3B63
Fig.3B63Fig.3B63
Fig.3B63
0107-001 2-32
䆛ࠀ乛ප䆛ࠀ乛ප
䆛ࠀ乛ප䆛ࠀ乛ප
䆛ࠀ乛ප
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅
Note
Note
High
Mark Level
Fig.3B64Fig.3B64
Fig.3B64Fig.3B64
Fig.3B64
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
5.0
Window Size[mm]
Fig.3B61Fig.3B61
Fig.3B61Fig.3B61
Fig.3B61
(A03_07)Recog Algo((A03_07)Recog Algo(
(A03_07)Recog Algo((A03_07)Recog Algo(
(A03_07)Recog Algo(
䆛ࠀ䆛ࠀ
䆛ࠀ䆛ࠀ
䆛ࠀ
Algolithm)Algolithm)
Algolithm)Algolithm)
Algolithm)
ԱЏා⠝䆛ࠀ Algorithm 䗞ᢾ “Pattern match(Ḍᵔᔷ䗞䜢)”
“Edge detection(䖎㓭ẕ⌠)”Ȣ
䗯ᐍ䇌䆓ᅯЏ “Pattern match(Ḍᵔᔷ䗞䜢)”Ȣ
PatternPattern
PatternPattern
Pattern
ḎḌᵔᔷ䗞䜢ᠠ⊪ⱙ䆛ࠀͼ䆛ࠀᷜ
䆅ාᵔР䯉ঢᏃᇤͼᷜ䆅Ѽ⫴䰉
ᕆᯋՔ⫽Ȣ
Fig.3B66Fig.3B66
Fig.3B66Fig.3B66
Fig.3B66
Edge detectionEdge detection
Edge detectionEdge detection
Edge detection
ẕ⌠㸺ℸ䆛ࠀᷜ䆅䖎㓭ⱙᠠ⊪ͼ䆛ࠀ
ᷜ䆅ාᵔР䯉ঢᏃᇤͼ䆛ࠀᷜ䆅
ᰓᕆᯋՔ⫽Ȣ
Fig.3B67Fig.3B67
Fig.3B67Fig.3B67
Fig.3B67
Pattern
Recog Algo
Fig.3B65Fig.3B65
Fig.3B65Fig.3B65
Fig.3B65
0107-001 2-33
P.C.B(P.C.B(
P.C.B(P.C.B(
P.C.B(
ා⠝ා⠝
ා⠝ා⠝
ා⠝
))
))
)
Fiducial Mark(Fiducial Mark(
Fiducial Mark(Fiducial Mark(
Fiducial Mark(
ා⠝ᷜ䆅ා⠝ᷜ䆅
ා⠝ᷜ䆅ා⠝ᷜ䆅
ා⠝ᷜ䆅
))
))
)
((
((
(
BrightBright
BrightBright
Bright
((
((
(
ᯣᯣ
ᯣᯣ
ᯣ
))))
))))
))
䆛ࠀᷜ䆅ᰓᕆ䆛ࠀᷜ䆅ᰓᕆ
䆛ࠀᷜ䆅ᰓᕆ䆛ࠀᷜ䆅ᰓᕆ
䆛ࠀᷜ䆅ᰓᕆ
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
P.C.B(P.C.B(
P.C.B(P.C.B(
P.C.B(
ා⠝ා⠝
ා⠝ා⠝
ා⠝
)(Bright)(Bright
)(Bright)(Bright
)(Bright
((
((
(
ᯣᯣ
ᯣᯣ
ᯣ
))))
))))
))
Fiducial Mark(Fiducial Mark(
Fiducial Mark(Fiducial Mark(
Fiducial Mark(
ා⠝ᷜ䆅ා⠝ᷜ䆅
ා⠝ᷜ䆅ා⠝ᷜ䆅
ා⠝ᷜ䆅
))
))
)
(Bright(Bright
(Bright(Bright
(Bright
((
((
(
ᯣᯣ
ᯣᯣ
ᯣ
))))
))))
))
0107-001 2
-
34
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(2.3 Operation Data(
2.3 Operation Data(
))
))
)
(A03_08)Fiducial Marks((A03_08)Fiducial Marks(
(A03_08)Fiducial Marks((A03_08)Fiducial Marks(
(A03_08)Fiducial Marks(
))
))
)
(1)(1)
(1)(1)
(1)
//
//
/
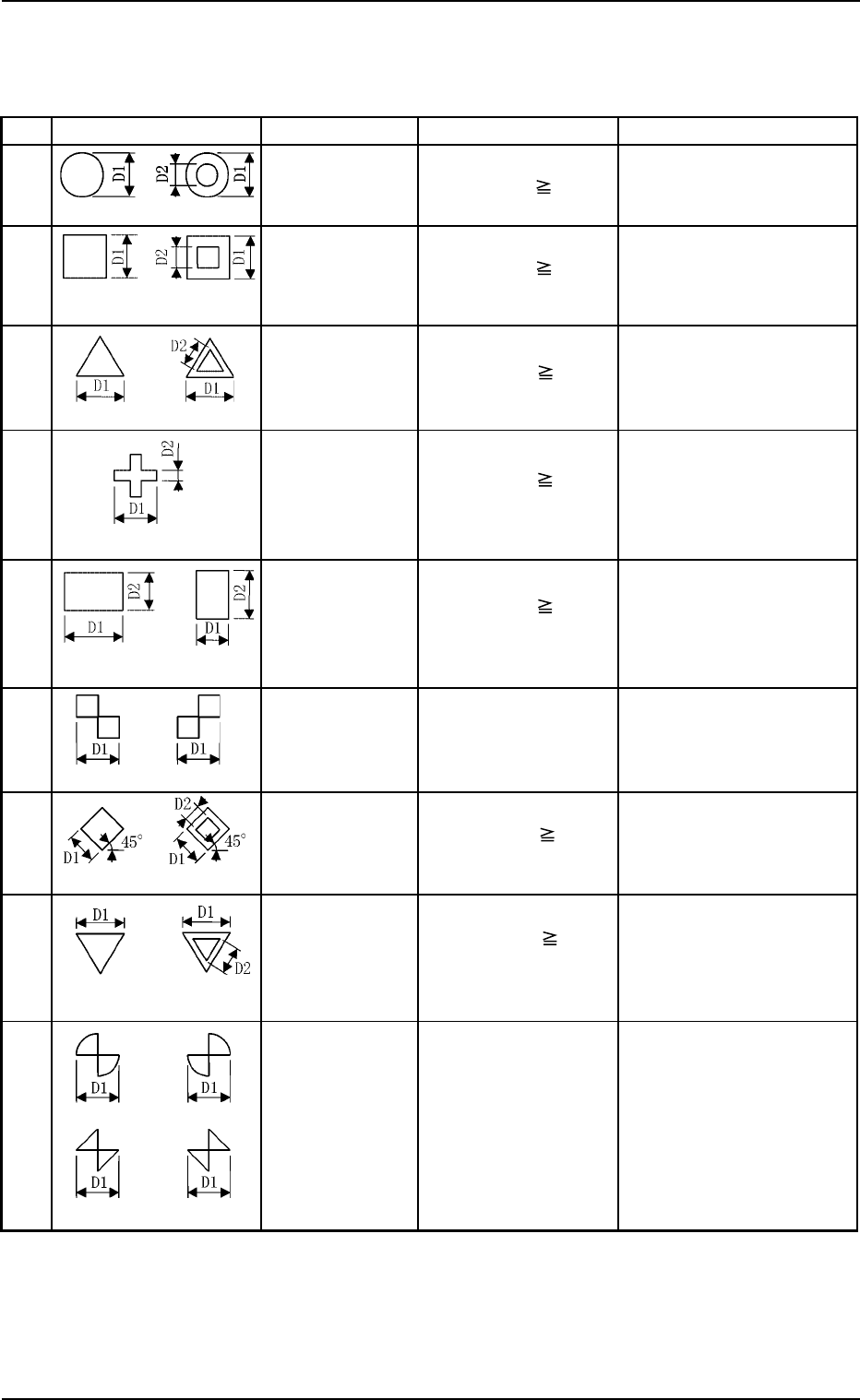
Table 3B16Table 3B16
Table 3B16Table 3B16
Table 3B16
RoundSquareCrossRectangle
Checker
(Square)
Diamond
(Rotated Square)
Bow Tie
Equilateral
Triangle
(Upturned)
Equilateral
Triangle
(Downturned)
D1[mm10%] D1[mm10%]
D1[mm10%] D1[mm10%]
D1[mm10%]
D2[mm D2[mm
D2[mm D2[mm
D2[mm
10%]10%]
10%]10%]
10%]
0.53.002.8 •
:
(, D1-0.2 D2) •
D2 : D2 :
D2 : D2 :
D2 :
0.53.002.8 •
: :
: :
:
(, D1-0.2
D2) •
D2 : D2 :
D2 : D2 :
D2 :
0.53.002.8 •
: :
: :
:
(, D1-0.2 D2) •
D2 : D2 :
D2 : D2 :
D2 :
0.53.00.21.5 •
: :
: :
:
(, D1-0.2
D2)
0.53.00.53.0•
: :
: :
:
(, D1-0.2
D2)
0.53.0 •
:
0.53.002.8•
: :
: :
:
(, D1-0.2
D2) •
D2 : D2 :
D2 : D2 :
D2 :
0.53.002.8•
: :
: :
:
(, D1-0.2
D2) •
D2 : D2 :
D2 : D2 :
D2 :
0.53.0 •
:
()
()
()
()
()
()
()
()