Program.x200.pdf - 第60页
(C02_02)Unit P.C.B. B.B.R.( (C02_02)Unit P.C.B. B.B.R.( (C02_02)Unit P.C.B. B.B.R.( (C02_02)Unit P.C.B. B.B.R.( (C02_02)Unit P.C.B. B.B.R.( 㒙ঢ়ාᵔ䆛ࠀ 㒙ঢ়ාᵔ䆛ࠀ 㒙ঢ়ාᵔ䆛ࠀ 㒙ঢ়ාᵔ䆛ࠀ 㒙ঢ়ාᵔ䆛ࠀ ) ) ) ) ) 䆓ᅯ㒙ঢ়ාᵔ䆛ࠀࡴ㛒Ȣ Disable( Disable( Disab…
(C02)Placement Data((C02)Placement Data(
(C02)Placement Data((C02)Placement Data(
(C02)Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(P-data))(P-data)
)(P-data))(P-data)
)(P-data)
(C02_0 )Unit Control((C02_0 )Unit Control(
(C02_0 )Unit Control((C02_0 )Unit Control(
(C02_0 )Unit Control(
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ
))
))
)
ңҺϠ䗞ᢾᅞ㺚ᭅ(00 ,002ĉĉUn)ⱙՔ⫽Ȣ
䗯ᐍ䇌䗞ᢾ “Placement(ᅞ㺚)”Ȣ
Placement(Placement(
Placement(Placement(
Placement(
ᅞ㺚ᅞ㺚
ᅞ㺚ᅞ㺚
ᅞ㺚
))
))
)
::
::
: ᅞ㺚ᭅपԢⱙᅞ㺚ᭅЏ᳞ᬝȢ
Bypass(Bypass(
Bypass(Bypass(
Bypass(
℺偹℺偹
℺偹℺偹
℺偹
))
))
)
::
::
: ᅞ㺚ᭅपԢⱙᅞ㺚ᭅЏ᮵ᬝȢ
Offset X [mm]Offset X [mm]
Offset X [mm]Offset X [mm]
Offset X [mm]
ȡȡ
ȡȡ
ȡ
Offset Y [mm] Offset Y [mm]
Offset Y [mm] Offset Y [mm]
Offset Y [mm]
䆓ᅯᅞ㺚ᭅ(P)ܽԨᅞ㺚ഥᷜ “X,Y” ⱙ Offset ؑȢ
पԢ: mm
ᭅ䆓ᅯ㣘ᭅ䆓ᅯ㣘
ᭅ䆓ᅯ㣘ᭅ䆓ᅯ㣘
ᭅ䆓ᅯ㣘
X : -99.99+99.99 Y : -99.99+99.99
(a) 䗯ᐍՔ⫽䳋Ȣ
(b) 䇌⊽ᛤ䆺 Offset Ϣᕆઢ “A02_02 P.E.C recognition
mode global(ᭉԨ䆛ࠀ)” ⱙഥᷜ “X, Y”Ȣ
Offset ZOffset Z
Offset ZOffset Z
Offset Z
䆓ᅯᅞ㺚ᭅ(P)ܽԨᅞ㺚㾧ᑻ “Z ” ⱙ Offset ؑȢ
पԢ : eᑻ ߛ
ᭅ䆓ᅯ㣘ᭅ䆓ᅯ㣘
ᭅ䆓ᅯ㣘ᭅ䆓ᅯ㣘
ᭅ䆓ᅯ㣘
Z : -99.99+99.99
䗯ᐍՔ⫽䳋Ȣ
+00.00
+00.00
Offset X [mm]
Offset Y [mm]
Fig.3B88Fig.3B88
Fig.3B88Fig.3B88
Fig.3B88
+00
e
00
Offset Z
Fig.3B89Fig.3B89
Fig.3B89Fig.3B89
Fig.3B89
0107-001 2-41
Note
Note
Fig.3B87Fig.3B87
Fig.3B87Fig.3B87
Fig.3B87
Unit Control
Placement
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
))
))
)
(C02_02)Unit P.C.B. B.B.R.((C02_02)Unit P.C.B. B.B.R.(
(C02_02)Unit P.C.B. B.B.R.((C02_02)Unit P.C.B. B.B.R.(
(C02_02)Unit P.C.B. B.B.R.(
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ
))
))
)
䆓ᅯ㒙ঢ়ාᵔ䆛ࠀࡴ㛒Ȣ
Disable(Disable(
Disable(Disable(
Disable(
Ϣ䆛ࠀϢ䆛ࠀ
Ϣ䆛ࠀϢ䆛ࠀ
Ϣ䆛ࠀ
):):
):):
):ϢՔ⫽㒙ঢ়ාᵔ䆛ࠀࡴ㛒Ȣ
Enable(Enable(
Enable(Enable(
Enable(
䆛ࠀ䆛ࠀ
䆛ࠀ䆛ࠀ
䆛ࠀ
))
))
)
: :
: :
:Ք⫽㒙ঢ়ාᵔ䆛ࠀࡴ㛒(Ϲ⚎䆛ࠀ) Ȣ
Fig.3B91Fig.3B91
Fig.3B91Fig.3B91
Fig.3B91
㒙ঢ়ාᵔ䆛ࠀՠ㒙ঢ়ාᵔ䆛ࠀՠ
㒙ঢ়ාᵔ䆛ࠀՠ㒙ঢ়ාᵔ䆛ࠀՠ
㒙ঢ়ාᵔ䆛ࠀՠ
(a) 㒙ঢ়ාᵔ䆛ࠀࡴ㛒ⱙ䆻㒛ݚᆎ䇌গ✼ “ 2 ㆜Ί᪢Ա(SUPERVISOR)”
ⱙ 2 㡗 2.⾢ࡴ㛒 ” サ㡗Ȣ
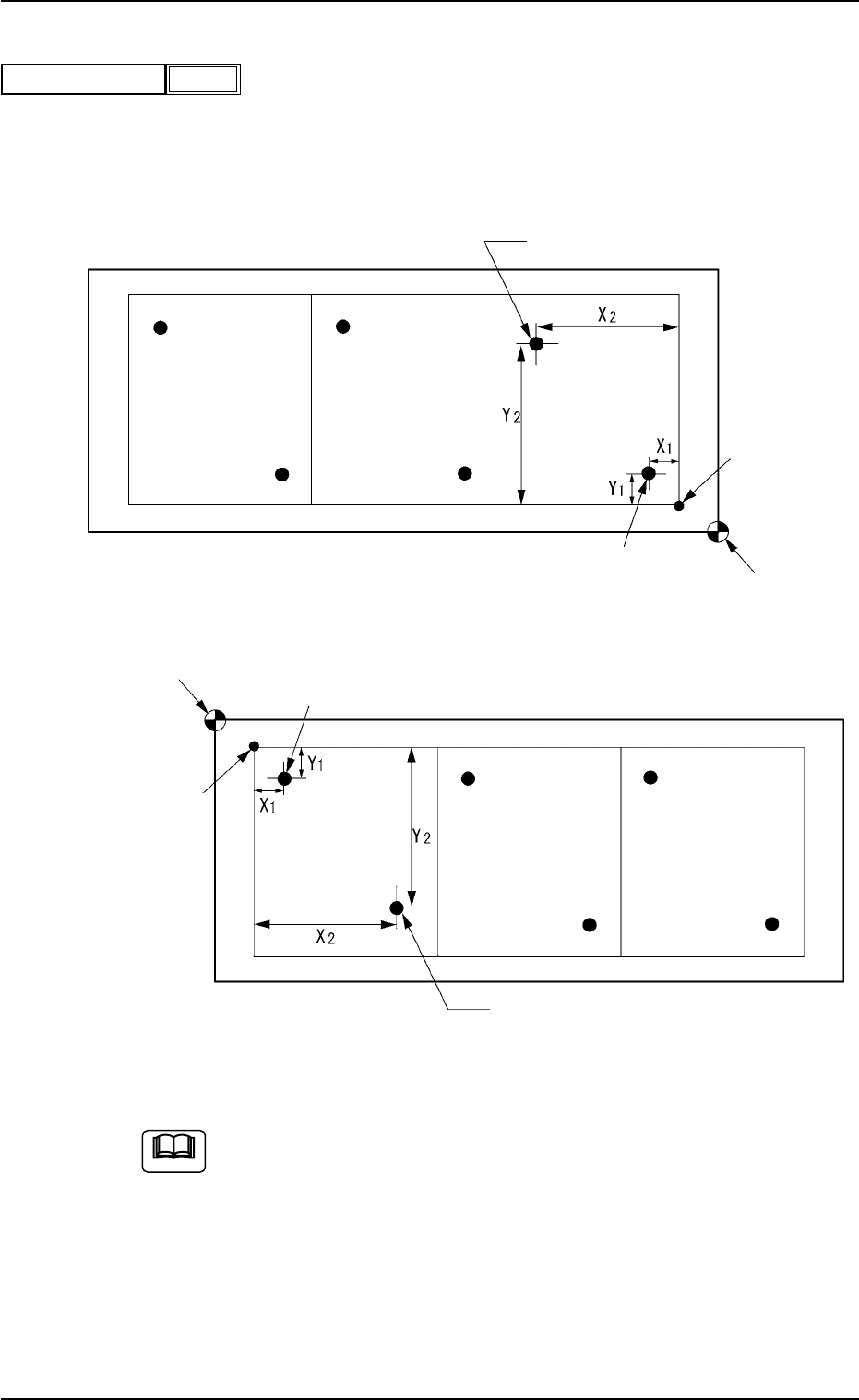
(b) ᔷॴ⚎䇌ࣔᖚ䆓ᅯᅞ㺚ഥᷜාޛݚȢ
(c) 䗗ᔨԢ㕃䆓㕃㒙ঢ়ාᵔ䆛ࠀഥᷜⱙϕ⚎ѡ⚎Ȣ
0107-001 2-42
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎
ϕ
⚎ⱙාᵔ䆛ࠀᷜ䆅⚎ⱙාᵔ䆛ࠀᷜ䆅
⚎ⱙාᵔ䆛ࠀᷜ䆅⚎ⱙාᵔ䆛ࠀᷜ䆅
⚎ⱙාᵔ䆛ࠀᷜ䆅
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
ϕ
⚎ⱙාᵔ䆛ࠀᷜ䆅⚎ⱙාᵔ䆛ࠀᷜ䆅
⚎ⱙාᵔ䆛ࠀᷜ䆅⚎ⱙාᵔ䆛ࠀᷜ䆅
⚎ⱙාᵔ䆛ࠀᷜ䆅
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
ѡ⚎ⱙාᵔ䆛ࠀᷜ䆅
Note
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
))
))
)
Enable
Unit P.C.B. B.B.R.
Fig.3B90Fig.3B90
Fig.3B90Fig.3B90
Fig.3B90
TCM-X200TCM-X200
TCM-X200TCM-X200
TCM-X200
TCM-X100TCM-X100
TCM-X100TCM-X100
TCM-X100
Recog Coord( Recog Coord(
Recog Coord( Recog Coord(
Recog Coord(
))
))
)
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ
X1[mm]X1[mm]
X1[mm]X1[mm]
X1[mm]
ȡȡ
ȡȡ
ȡ
Recog Coord Y1 [mm]Recog Coord Y1 [mm]
Recog Coord Y1 [mm]Recog Coord Y1 [mm]
Recog Coord Y1 [mm]
Һᔷॴ⚎Џාޛͼ䆓ᅯϕ⚎ⱙ㒙ঢ়ාᵔ䆛ࠀഥᷜ “X1 Y1”Ȣ
पԢ : mm
Recog Coord(Recog Coord(
Recog Coord(Recog Coord(
Recog Coord(
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ
))
))
)
X2[mm]X2[mm]
X2[mm]X2[mm]
X2[mm]
ȡȡ
ȡȡ
ȡ
Recog Coord Y2Recog Coord Y2
Recog Coord Y2Recog Coord Y2
Recog Coord Y2
[mm][mm]
[mm][mm]
[mm]
Һᔷॴ⚎Џාޛͼ䆓ᅯϕ⚎ⱙ㒙ঢ়ාᵔ䆛ࠀഥᷜ “X2 Y2”Ȣ
पԢ: mm
Fiducial Mark(Fiducial Mark(
Fiducial Mark(Fiducial Mark(
Fiducial Mark(
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ䆛ࠀഥᷜ
䆛ࠀഥᷜ
)FM1)FM1
)FM1)FM1
)FM1
ȡȡ
ȡȡ
ȡ
Fiducial Mark FM2Fiducial Mark FM2
Fiducial Mark FM2Fiducial Mark FM2
Fiducial Mark FM2
䆓ᅯϕ⚎㒙ঢ়ාᵔ䆛ࠀᷜ䆅ৌ FM1 ѡ⚎ⱙᷜ䆅ৌ FM2Ȣ
䇌䆓Џ᪢Աᭅⱙාᵔ䆛ࠀᷜ䆅ᭅⱙ㓫ৌЂ䗞ᢾȢ
0107-001 2-43
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(2.5 Placement Data(
2.5 Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
))
))
)
010.000
010.000
Recog Coord X1[mm]
Recog Coord Y1[mm]
Fig.3B92Fig.3B92
Fig.3B92Fig.3B92
Fig.3B92
100.000
100.000
Recog Coord X2[mm]
Recog Coord Y2[mm]
Fig.3B93Fig.3B93
Fig.3B93Fig.3B93
Fig.3B93
01
01
Fiducial Mark FM1
Fiducial Mark FM2
Fig.3B94Fig.3B94
Fig.3B94Fig.3B94
Fig.3B94