Program.x200.pdf - 第74页
0107-001 2 - 56 3.2 3.2 3.2 3.2 3.2 पϿḌᵔᔷ पϿḌᵔᔷ पϿḌᵔᔷ पϿḌᵔᔷ पϿḌᵔᔷ ( ( ( ( ( ᳞ᭉԨ䆛ࠀ ᳞ᭉԨ䆛ࠀ ᳞ᭉԨ䆛ࠀ ᳞ᭉԨ䆛ࠀ ᳞ᭉԨ䆛ࠀ ) ) ) ) ) ( )Pattern Program ( )Pattern Program ( )Pattern Program ( )Pattern Program ( )Pattern Pr…
0107-001 2-55
•
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅ
))
))
)
䇌ᡟාᵔ䆛ࠀࡴ㛒䗞ᢾ䆓ᅯЏ “Disable(Ϣ䆛ࠀ) ”Ȣ
䇌Ϣ㽖䆓ᅯҫᭅȢ
•
P.E.C.Recognition Mark Data(P.E.C.Recognition Mark Data(
P.E.C.Recognition Mark Data(P.E.C.Recognition Mark Data(
P.E.C.Recognition Mark Data(
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅ
))
))
)
䇌Ϣ㽖㓫ࠋℹᭅȢ
•
Setup Data(SetupSetup Data(Setup
Setup Data(SetupSetup Data(Setup
Setup Data(Setup
ᭅᭅ
ᭅᭅ
ᭅ
))
))
)
䳕㽖Ք⫽㞿ࡽ Setup ࡴ㛒ᯋ㓫ࠋȢ
(3)Placement Feeder Location Data(3)Placement Feeder Location Data
(3)Placement Feeder Location Data(3)Placement Feeder Location Data
(3)Placement Feeder Location Data
((
((
(
ܘӋ䜢㕃ᭅⱙ㓫ࠋܘӋ䜢㕃ᭅⱙ㓫ࠋ
ܘӋ䜢㕃ᭅⱙ㓫ࠋܘӋ䜢㕃ᭅⱙ㓫ࠋ
ܘӋ䜢㕃ᭅⱙ㓫ࠋ
))
))
)
Table 3B9Table 3B9
Table 3B9Table 3B9
Table 3B9
Fdr.No.Fdr.No.
Fdr.No.Fdr.No.
Fdr.No.
Componet ID(Componet ID(
Componet ID(Componet ID(
Componet ID(
ܘӋܘӋ
ܘӋܘӋ
ܘӋ
ID)ID)
ID)ID)
ID)
CC
CC
C
ܘӋܘӋ
ܘӋܘӋ
ܘӋ
Feeder Feeder
Feeder Feeder
Feeder
ᅯᅯ
ᅯᅯ
ᅯ
FeederFeeder
FeederFeeder
Feeder
AlternateAlternate
AlternateAlternate
Alternate
Fdr.No.Fdr.No.
Fdr.No.Fdr.No.
Fdr.No.
00
00
0
TANA326B0---TANA32 6B0---
TANA326B0---TANA32 6B0---
TANA326B0---
--
--
-
ϢᅯϢᅯ
ϢᅯϢᅯ
Ϣᅯ
ϢՔ⫽ϢՔ⫽
ϢՔ⫽ϢՔ⫽
ϢՔ⫽
000000
000000
000
0303
0303
03
TR202-3B0SANL2TR202-3B0SANL2
TR202-3B0SANL2TR202-3B0SANL2
TR202-3B0SANL2
--
--
-
ϢᅯϢᅯ
ϢᅯϢᅯ
Ϣᅯ
ϢՔ⫽ϢՔ⫽
ϢՔ⫽ϢՔ⫽
ϢՔ⫽
000000
000000
000
0505
0505
05
SOP008-B02SANSOP008-B02SAN
SOP008-B02SANSOP008-B02SAN
SOP008-B02SAN
EE
EE
E
ϢᅯϢᅯ
ϢᅯϢᅯ
Ϣᅯ
ϢՔ⫽ϢՔ⫽
ϢՔ⫽ϢՔ⫽
ϢՔ⫽
000000
000000
000
(4)Placement(4)Placement
(4)Placement(4)Placement
(4)Placement
Data(Data(
Data(Data(
Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(P-data)U0)(P-data)U0
)(P-data)U0)(P-data)U0
)(P-data)U0
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
•
Unit Control(Unit Control(
Unit Control(Unit Control(
Unit Control(
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ
))
))
)
Table 3B20Table 3B20
Table 3B20Table 3B20
Table 3B20
UnitUnit
UnitUnit
Unit
Offset Offset
Offset Offset
Offset
OffsetOffset
OffsetOffset
Offset
OffsetOffset
OffsetOffset
Offset
ControlControl
ControlControl
Control
X[mm]X[mm]
X[mm]X[mm]
X[mm]
Y[mm]Y[mm]
Y[mm]Y[mm]
Y[mm]
Z Z
Z Z
Z
ᅞ㺚ᅞ㺚
ᅞ㺚ᅞ㺚
ᅞ㺚
+00.00+00.00
+00.00+00.00
+00.00
+00.00+00.00
+00.00+00.00
+00.00
+00 +00
+00 +00
+00
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
•
Unit P.C.B. B.B.R(Unit P.C.B. B.B.R(
Unit P.C.B. B.B.R(Unit P.C.B. B.B.R(
Unit P.C.B. B.B.R(
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ
))
))
)
䇌ᡟ “Unit P.C.B. B.B.R(㒙ঢ়ාᵔ䆛ࠀ)” 䆓ᅯЏ “ Disable(Ϣ䆛ࠀ)”Ȣ
䇌Ϣ㽖䆓ᅯҫᭅȢ
•
Placement Data(Placement Data(
Placement Data(Placement Data(
Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(P-data))(P-data)
)(P-data))(P-data)
)(P-data)
Table 3B2 Table 3B2
Table 3B2 Table 3B2
Table 3B2
P-No.P-No.
P-No.P-No.
P-No.
XX
XX
X
[mm][mm]
[mm][mm]
[mm]
Y[mm]Y[mm]
Y[mm]Y[mm]
Y[mm]
Z Z
Z Z
Z
H[mm]H[mm]
H[mm]H[mm]
H[mm]
Fdr. NoFdr. No
Fdr. NoFdr. No
Fdr. No
CC
CC
C
CommentComment
CommentComment
Comment
XX
XX
X
YY
YY
Y
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
0 0
0 0
0
--
--
-
22
22
2
XX
XX
X
22
22
2
YY
YY
Y
22
22
2
90 90
90 90
90
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
03 03
03 03
03
--
--
-
33
33
3
XX
XX
X
33
33
3
YY
YY
Y
33
33
3
8080
8080
80
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
05 05
05 05
05
--
--
-
44
44
4
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
000000
000000
000
EE
EE
E
(5)(5)
(5)(5)
(5)
Placement Data(Placement Data(
Placement Data(Placement Data(
Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(O-data)U0)(O-data)U0
)(O-data)U0)(O-data)U0
)(O-data)U0
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
䇌Ϣ㽖㓫ࠋℹᭅȢ
3.3.
3.3.
3.
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷ
0107-001 2-56
3.23.2
3.23.2
3.2
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷ
((
((
(
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ
))
))
)
( )Pattern Program( )Pattern Program
( )Pattern Program( )Pattern Program
( )Pattern Program
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ
•
P.C.B.Size(P.C.B.Size(
P.C.B.Size(P.C.B.Size(
P.C.B.Size(
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍ
))
))
)
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
•
ܘӋῶḌܘӋܘӋῶḌܘӋ
ܘӋῶḌܘӋܘӋῶḌܘӋ
ܘӋῶḌܘӋ
IDID
IDID
ID
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
•
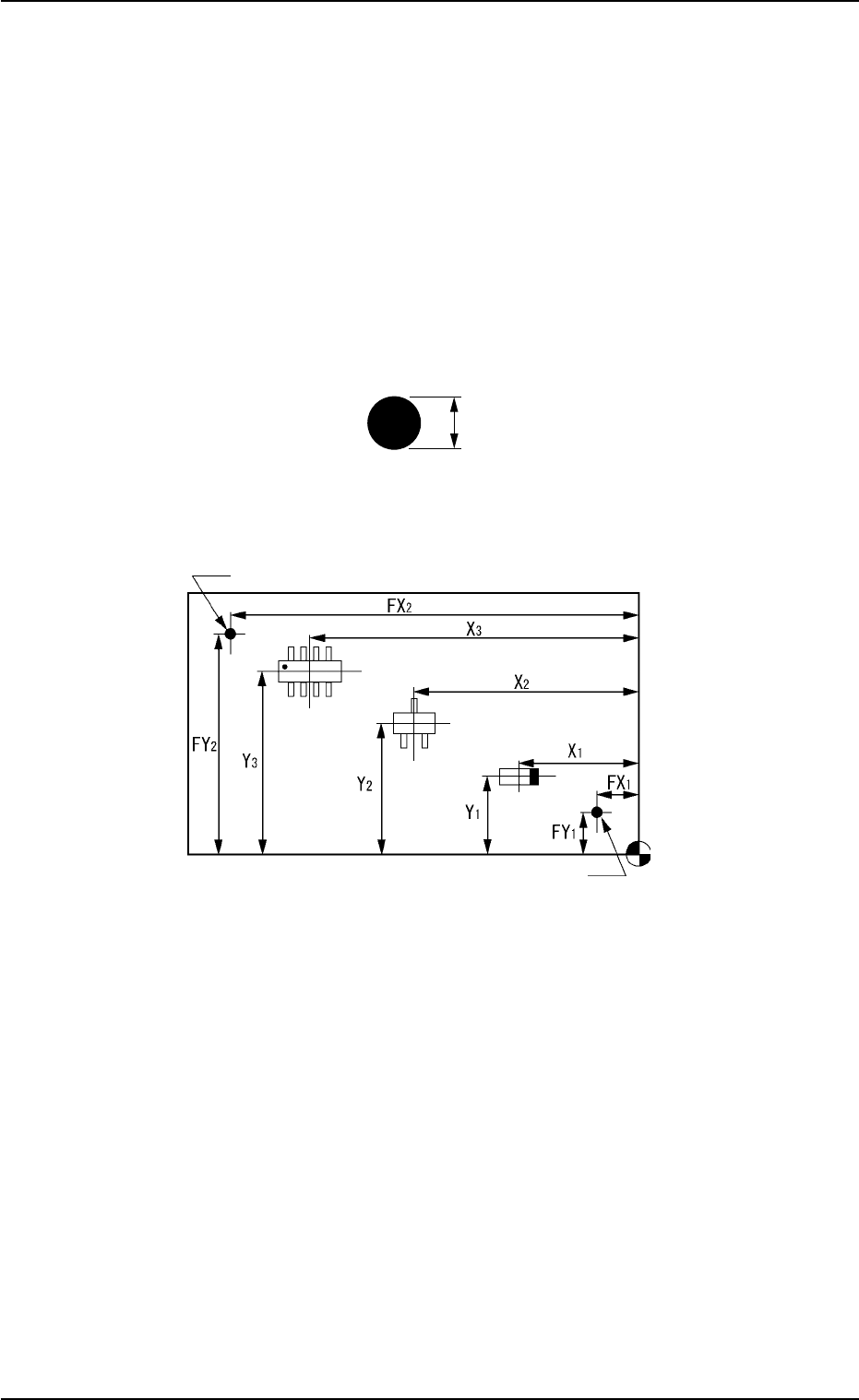
P.C.B.Recognition Mark(P.C.B.Recognition Mark(
P.C.B.Recognition Mark(P.C.B.Recognition Mark(
P.C.B.Recognition Mark(
ාᵔ䆛ࠀᷜ䆅ාᵔ䆛ࠀᷜ䆅
ාᵔ䆛ࠀᷜ䆅ාᵔ䆛ࠀᷜ䆅
ාᵔ䆛ࠀᷜ䆅
))
))
)
Fig.3B9Fig.3B9
Fig.3B9Fig.3B9
Fig.3B9
•
ᅞ㺚ഥᷜȡᅞ㺚ഥᷜȡ
ᅞ㺚ഥᷜȡᅞ㺚ഥᷜȡ
ᅞ㺚ഥᷜȡ
ᅞ㺚㾧ᑻ䆛ࠀᷜ䆅ഥᷜᅞ㺚㾧ᑻ䆛ࠀᷜ䆅ഥᷜ
ᅞ㺚㾧ᑻ䆛ࠀᷜ䆅ഥᷜᅞ㺚㾧ᑻ䆛ࠀᷜ䆅ഥᷜ
ᅞ㺚㾧ᑻ䆛ࠀᷜ䆅ഥᷜ
Fig.3B 20Fig.3B 20
Fig.3B 20Fig.3B 20
Fig.3B 20
1.0 mm
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅䆛ࠀᷜ䆅
䆛ࠀᷜ䆅
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
3.3.
3.3.
3.
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷ
((
((
(
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ
))
))
)
0107-001 2-57
(2)Operation(2)Operation
(2)Operation(2)Operation
(2)Operation
Data(Data(
Data(Data(
Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
•
P.C.B. Data(P.C.B. Data(
P.C.B. Data(P.C.B. Data(
P.C.B. Data(
ාᵔᭅාᵔᭅ
ාᵔᭅාᵔᭅ
ාᵔᭅ
))
))
)
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
•
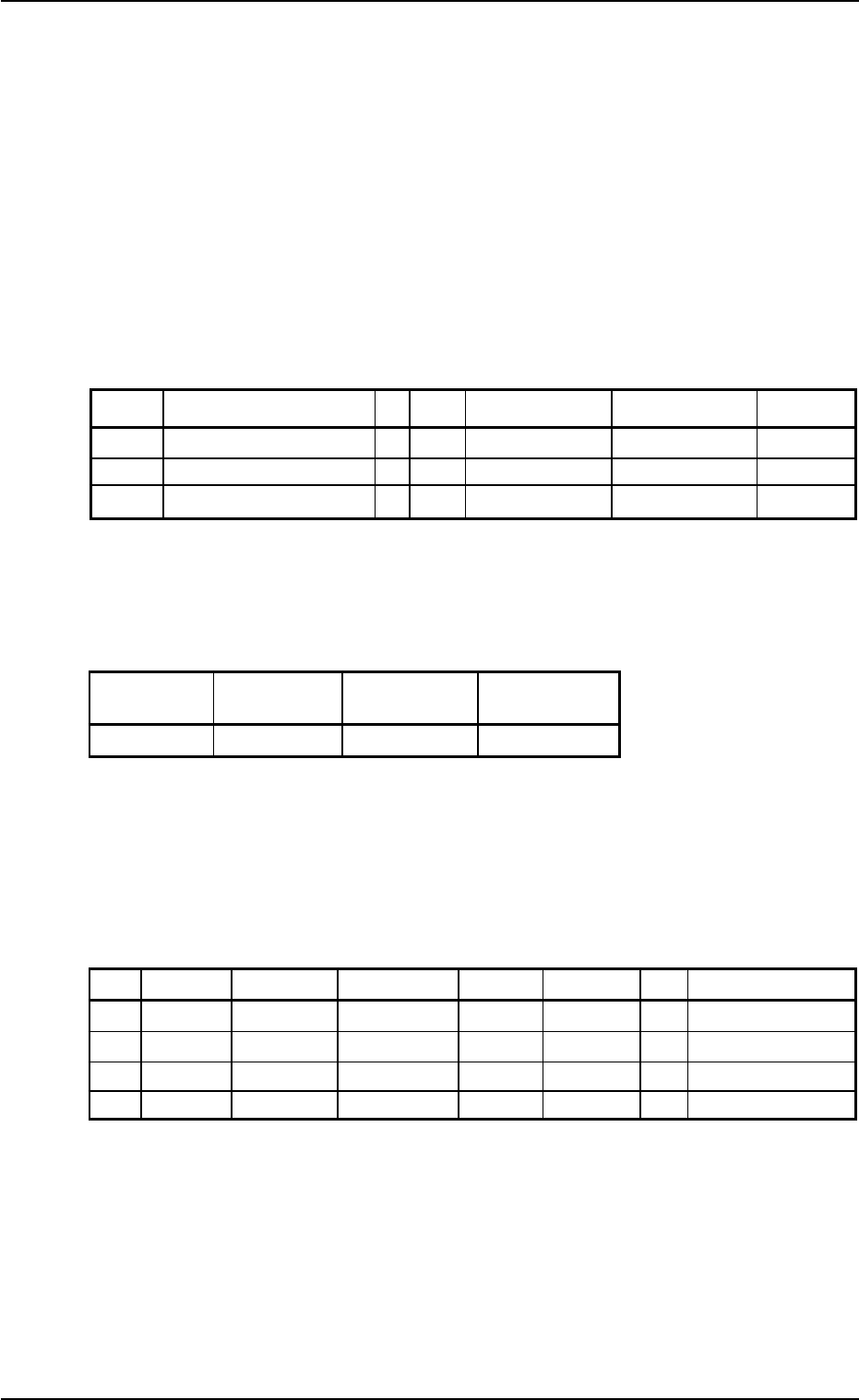
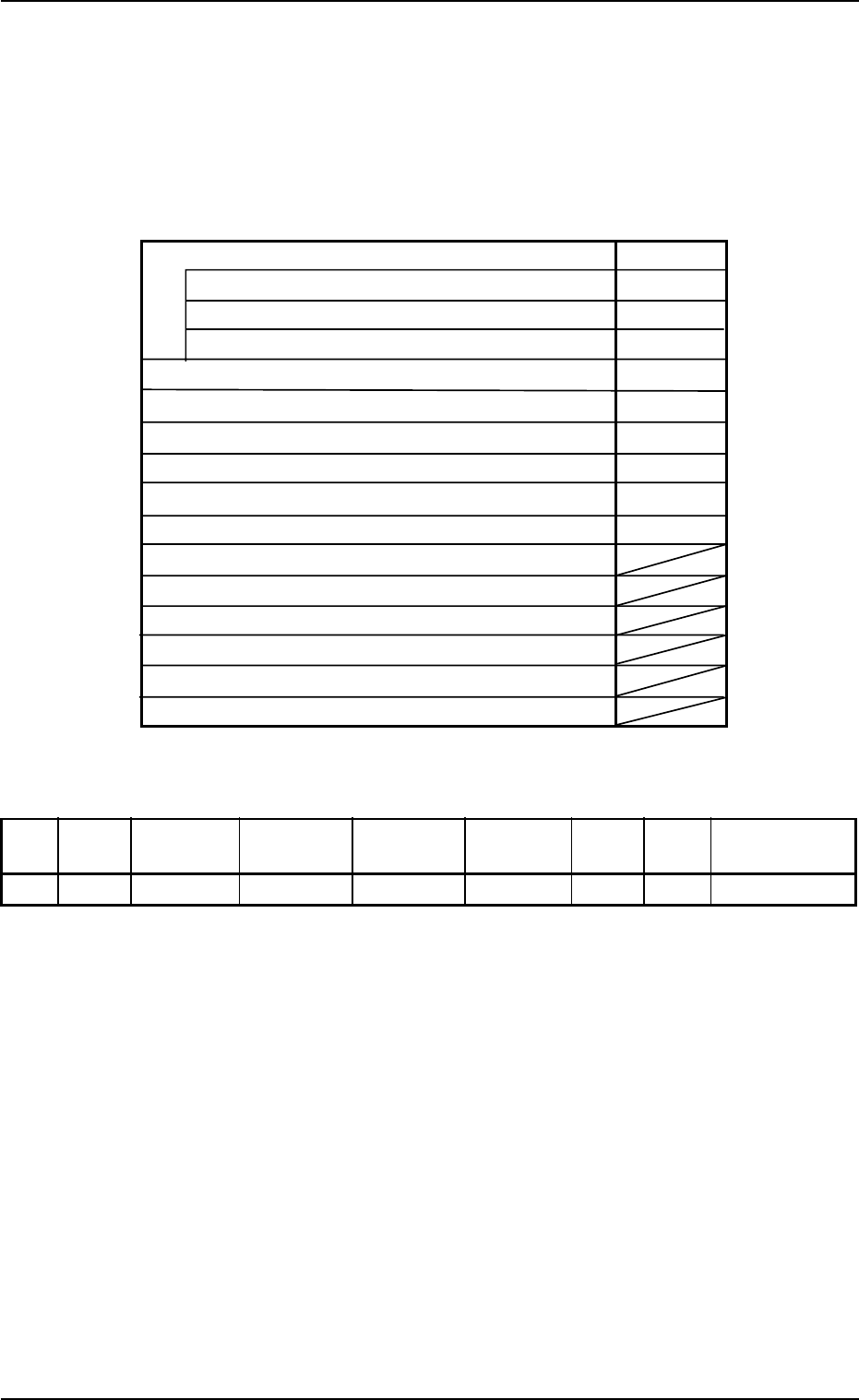
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅ
))
))
)
Table 3B22Table 3B22
Table 3B22Table 3B22
Table 3B22
P.E.C.Recognition FunctionP.E.C.Recognition Function
P.E.C.Recognition FunctionP.E.C.Recognition Function
P.E.C.Recognition Function
EnableEnable
EnableEnable
Enable
P.E.C.Recognition Mode globalP.E.C.Recognition Mode global
P.E.C.Recognition Mode globalP.E.C.Recognition Mode global
P.E.C.Recognition Mode global
2Point2Point
2Point2Point
2Point
P.E.C.Recognition Mode ImageP.E.C.Recognition Mode Image
P.E.C.Recognition Mode ImageP.E.C.Recognition Mode Image
P.E.C.Recognition Mode Image
DisableDisable
DisableDisable
Disable
P.E.C.Recognition Mode localP.E.C.Recognition Mode local
P.E.C.Recognition Mode localP.E.C.Recognition Mode local
P.E.C.Recognition Mode local
DisableDisable
DisableDisable
Disable
Fiducial mark # X location[mm]Fiducial mark # X location[mm]
Fiducial mark # X location[mm]Fiducial mark # X location[mm]
Fiducial mark # X location[mm]
FF
FF
F
XX
XX
X
FiducialFiducial
FiducialFiducial
Fiducial
mark # Y location[mm]mark # Y location[mm]
mark # Y location[mm]mark # Y location[mm]
mark # Y location[mm]
FF
FF
F
YY
YY
Y
Fiducial mark # Mark codeFiducial mark # Mark code
Fiducial mark # Mark codeFiducial mark # Mark code
Fiducial mark # Mark code
Fiducial mark #2 X locaFiducial mark #2 X loca
Fiducial mark #2 X locaFiducial mark #2 X loca
Fiducial mark #2 X loca
tion[mm]tion[mm]
tion[mm]tion[mm]
tion[mm]
FF
FF
F
XX
XX
X
22
22
2
FF
FF
F
iducial mark #2 Y locationiducial mark #2 Y location
iducial mark #2 Y locationiducial mark #2 Y location
iducial mark #2 Y location
[mm][mm]
[mm][mm]
[mm]
FF
FF
F
YY
YY
Y
22
22
2
Fiducial mark #2 Mark codeFiducial mark #2 Mark code
Fiducial mark #2 Mark codeFiducial mark #2 Mark code
Fiducial mark #2 Mark code
Fiducial mark #3 X location[mm]Fiducial mark #3 X location[mm]
Fiducial mark #3 X location[mm]Fiducial mark #3 X location[mm]
Fiducial mark #3 X location[mm]
Fiducial mark #3 Y location[mm]Fiducial mark #3 Y location[mm]
Fiducial mark #3 Y location[mm]Fiducial mark #3 Y location[mm]
Fiducial mark #3 Y location[mm]
Fiducial mark #3 Mark codeFiducial mark #3 Mark code
Fiducial mark #3 Mark codeFiducial mark #3 Mark code
Fiducial mark #3 Mark code
Fiducial mark #4 X location[mm]Fiducial mark #4 X location[mm]
Fiducial mark #4 X location[mm]Fiducial mark #4 X location[mm]
Fiducial mark #4 X location[mm]
Fiducial mark #4 Y location[mm]Fiducial mark #4 Y location[mm]
Fiducial mark #4 Y location[mm]Fiducial mark #4 Y location[mm]
Fiducial mark #4 Y location[mm]
Fiducial mark #4 Mark codeFiducial mark #4 Mark code
Fiducial mark #4 Mark codeFiducial mark #4 Mark code
Fiducial mark #4 Mark code
•
P.C.B. Recognition Mark Data(P.C.B. Recognition Mark Data(
P.C.B. Recognition Mark Data(P.C.B. Recognition Mark Data(
P.C.B. Recognition Mark Data(
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅ
))
))
)
Table 3B23Table 3B23
Table 3B23Table 3B23
Table 3B23
MarkMark
MarkMark
Mark
MarkMark
MarkMark
Mark
MarkMark
MarkMark
Mark
SizeSize
SizeSize
Size
Mark Mark
Mark Mark
Mark
SizeSize
SizeSize
Size
MarkMark
MarkMark
Mark
SizeSize
SizeSize
Size
WindowWindow
WindowWindow
Window
Mark Mark
Mark Mark
Mark
Mark Mark
Mark Mark
Mark
RecogRecog
RecogRecog
Recog
##
##
#
TypeType
TypeType
Type
D[mm] D[mm]
D[mm] D[mm]
D[mm]
D2[mm] D2[mm]
D2[mm] D2[mm]
D2[mm]
D3[mm] D3[mm]
D3[mm] D3[mm]
D3[mm]
Size[mm] Image Size[mm] Image
Size[mm] Image Size[mm] Image
Size[mm] Image
Level Level
Level Level
Level
Algo Algo
Algo Algo
Algo
XX
XX
X
RoundRound
RoundRound
Round
.00mm.00mm
.00mm.00mm
.00mm
0.00mm 0.00mm
0.00mm 0.00mm
0.00mm
0.00mm 0.00mm
0.00mm 0.00mm
0.00mm
05.0mm05.0mm
05.0mm05.0mm
05.0mm
Bright Bright
Bright Bright
Bright
HighHigh
HighHigh
High
PatternPattern
PatternPattern
Pattern
•
Setup DataSetup Data
Setup DataSetup Data
Setup Data
䳕㽖Ք⫽㞿ࡽ Setup ࡴ㛒ᯋ㓫ࠋȢ
(3)Placement Feeder Location Data((3)Placement Feeder Location Data(
(3)Placement Feeder Location Data((3)Placement Feeder Location Data(
(3)Placement Feeder Location Data(
ܘӋ䜢㕃ᭅܘӋ䜢㕃ᭅ
ܘӋ䜢㕃ᭅܘӋ䜢㕃ᭅ
ܘӋ䜢㕃ᭅ
))
))
)
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
3.3.
3.3.
3.
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷपϿḌᵔᔷ
पϿḌᵔᔷ
((
((
(
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ᳞ᭉԨ䆛ࠀ
᳞ᭉԨ䆛ࠀ
))
))
)