Program.x200.pdf - 第82页
3.5 3.5 3.5 3.5 3.5 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ ( ( ( ( ( ᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒 ᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒 ᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒 ᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒 ᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒 ) ) ) ) ) ᭅ߰ᓏⱙݍՠབྷϠȢ ( )Pattern Program ( )Pattern Program ( )Pattern Program ( )Patter…
(4)Placement Data((4)Placement Data(
(4)Placement Data((4)Placement Data(
(4)Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(P-data)U0)(P-data)U0
)(P-data)U0)(P-data)U0
)(P-data)U0
•
Unit Control(Unit Control(
Unit Control(Unit Control(
Unit Control(
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ㺚㕃ࠋ
㺚㕃ࠋ
))
))
)
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
•
Unit P.C.B.B.B.R.(Unit P.C.B.B.B.R.(
Unit P.C.B.B.B.R.(Unit P.C.B.B.B.R.(
Unit P.C.B.B.B.R.(
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ㒙ঢ়ාᵔ䆛ࠀ
㒙ঢ়ාᵔ䆛ࠀ
))
))
)
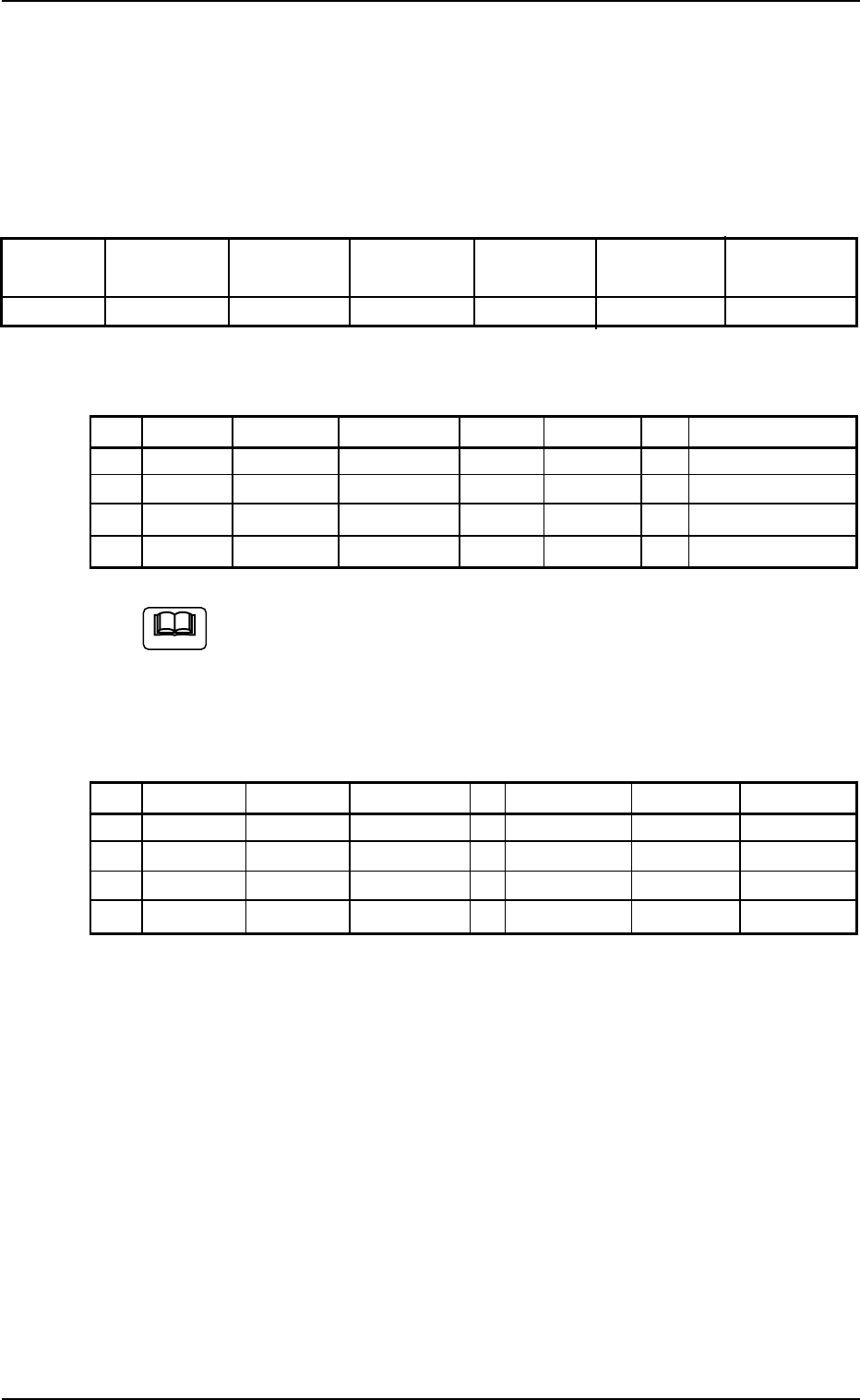
Table 3B28Table 3B28
Table 3B28Table 3B28
Table 3B28
Unit P.C.B.Unit P.C.B.
Unit P.C.B.Unit P.C.B.
Unit P.C.B.
Recog CoordRecog Coord
Recog CoordRecog Coord
Recog Coord
Recog CoordRecog Coord
Recog CoordRecog Coord
Recog Coord
Recog CoordRecog Coord
Recog CoordRecog Coord
Recog Coord
Recog CoordRecog Coord
Recog CoordRecog Coord
Recog Coord
Fiducial MarkFiducial Mark
Fiducial MarkFiducial Mark
Fiducial Mark
Fiducial MarkFiducial Mark
Fiducial MarkFiducial Mark
Fiducial Mark
B.B.R.B.B.R.
B.B.R.B.B.R.
B.B.R.
X [mm]X [mm]
X [mm]X [mm]
X [mm]
Y [mm]Y [mm]
Y [mm]Y [mm]
Y [mm]
X2 [mm]X2 [mm]
X2 [mm]X2 [mm]
X2 [mm]
Y2 [mm]Y2 [mm]
Y2 [mm]Y2 [mm]
Y2 [mm]
FMFM
FMFM
FM
FM2FM2
FM2FM2
FM2
EnableEnable
EnableEnable
Enable
FX FX
FX FX
FX
FYFY
FYFY
FY
FXFX
FXFX
FX
22
22
2
FYFY
FYFY
FY
22
22
2
•
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
(P-data)(P-data)
(P-data)(P-data)
(P-data)
Table 3B29Table 3B29
Table 3B29Table 3B29
Table 3B29
P-No.P-No.
P-No.P-No.
P-No.
X[mm]X[mm]
X[mm]X[mm]
X[mm]
YY
YY
Y
[mm][mm]
[mm][mm]
[mm]
Z Z
Z Z
Z
HH
HH
H
[mm][mm]
[mm][mm]
[mm]
Fdr.No.Fdr.No.
Fdr.No.Fdr.No.
Fdr.No.
CC
CC
C
CommentComment
CommentComment
Comment
XX
XX
X
XX
XX
X
YY
YY
Y
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
0 0
0 0
0
--
--
-
XX
XX
X
22
22
2
YY
YY
Y
22
22
2
090090
090090
090
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
03 03
03 03
03
--
--
-
XX
XX
X
33
33
3
YY
YY
Y
33
33
3
80 80
80 80
80
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
05 05
05 05
05
--
--
-
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
000000
000000
000
PP
PP
P
䇌ᡟ᳕㒝℺偹ⱙࠋᣜҹ䆓ᅯЏ “P ”㗚“Q ”Ȣ
(5)Placement Data((5)Placement Data(
(5)Placement Data((5)Placement Data(
(5)Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(0-data)U0)(0-data)U0
)(0-data)U0)(0-data)U0
)(0-data)U0
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
Table 3B30Table 3B30
Table 3B30Table 3B30
Table 3B30
O-No.O-No.
O-No.O-No.
O-No.
X[mm]X[mm]
X[mm]X[mm]
X[mm]
YY
YY
Y
[mm][mm]
[mm][mm]
[mm]
ZZ
ZZ
Z
CC
CC
C
CommentComment
CommentComment
Comment
B-XB-X
B-XB-X
B-X
[mm][mm]
[mm][mm]
[mm]
B-YB-Y
B-YB-Y
B-Y
[mm][mm]
[mm][mm]
[mm]
PXPX
PXPX
PX
PYPY
PYPY
PY
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
22
22
2
PXPX
PXPX
PX
22
22
2
PYPY
PYPY
PY
22
22
2
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
33
33
3
PXPX
PXPX
PX
33
33
3
PYPY
PYPY
PY
33
33
3
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
44
44
4
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
000000
000000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
E E
E E
E
000.00000.00
000.00000.00
000.00
000.00000.00
000.00000.00
000.00
0107-001 2-63
3.43.4
3.43.4
3.4
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
᳞㒙ঢ়䆛ࠀ᳞㒙ঢ়䆛ࠀ
᳞㒙ঢ়䆛ࠀ᳞㒙ঢ়䆛ࠀ
᳞㒙ঢ়䆛ࠀ
Note
3.53.5
3.53.5
3.5
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
))
))
)
ᭅ߰ᓏⱙݍՠབྷϠȢ
( )Pattern Program( )Pattern Program
( )Pattern Program( )Pattern Program
( )Pattern Program
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ
•
P.C.B.Size(P.C.B.Size(
P.C.B.Size(P.C.B.Size(
P.C.B.Size(
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍ
))
))
)
ȡȡ
ȡȡ
ȡ
ܘӋࣚ㺚䖱㾖ܘӋࣚ㺚䖱㾖
ܘӋࣚ㺚䖱㾖ܘӋࣚ㺚䖱㾖
ܘӋࣚ㺚䖱㾖
IDID
IDID
ID
ȡȡ
ȡȡ
ȡ
ාᵔ䆛ࠀᷜාᵔ䆛ࠀᷜ
ාᵔ䆛ࠀᷜාᵔ䆛ࠀᷜ
ාᵔ䆛ࠀᷜ
䆅䆅
䆅䆅
䆅
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
•
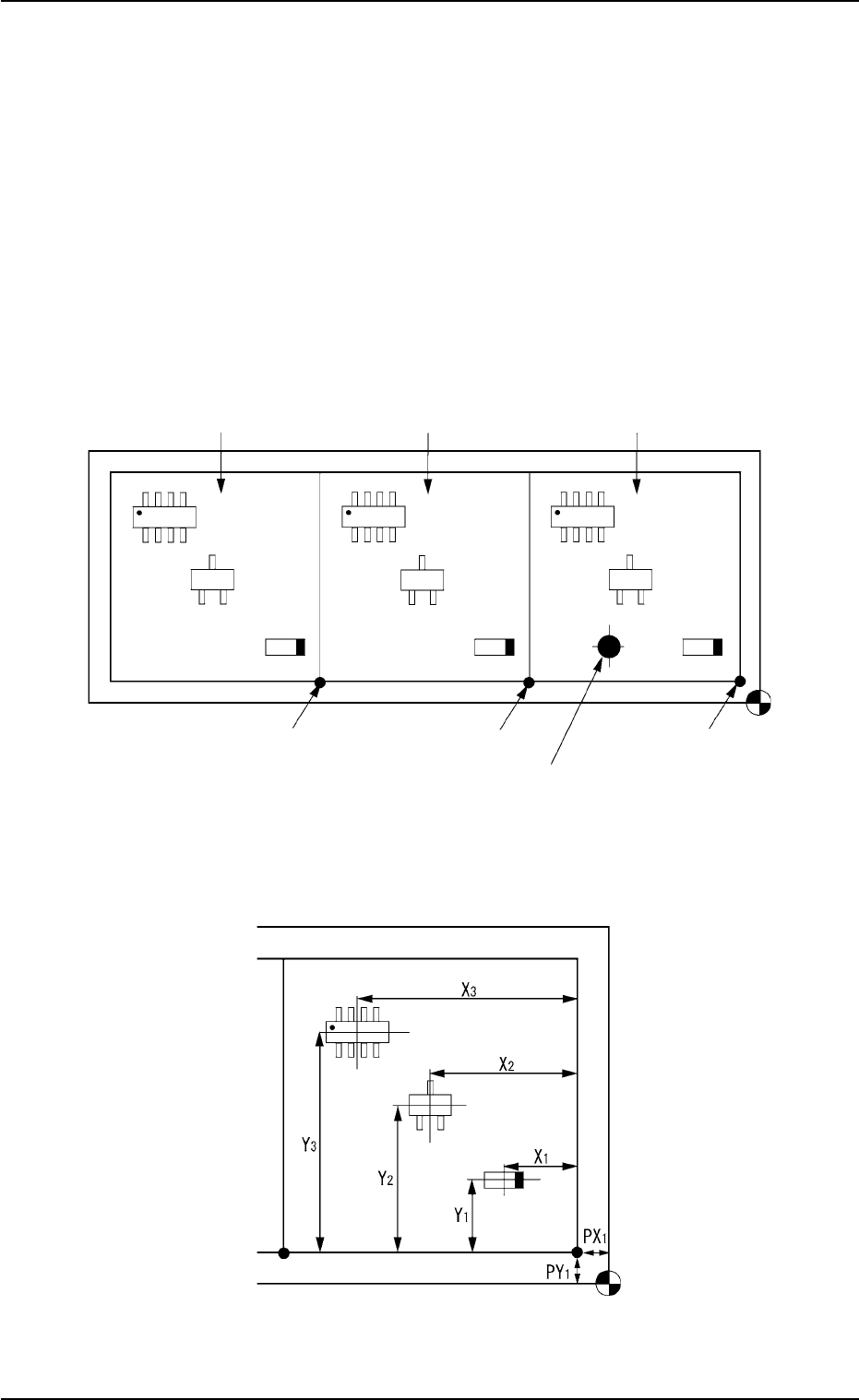
ᅞ㺚ഥᷜȡᅞ㺚ഥᷜȡ
ᅞ㺚ഥᷜȡᅞ㺚ഥᷜȡ
ᅞ㺚ഥᷜȡ
ᅞ㺚㾧ᑻᅞ㺚㾧ᑻ
ᅞ㺚㾧ᑻᅞ㺚㾧ᑻ
ᅞ㺚㾧ᑻ
Fig.3B 25Fig.3B 25
Fig.3B 25Fig.3B 25
Fig.3B 25
ᭉԨᭉԨ
ᭉԨᭉԨ
ᭉԨ
Fig.3B 26Fig.3B 26
Fig.3B 26Fig.3B 26
Fig.3B 26
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
((
((
(
ᬓᬓ
ᬓᬓ
ᬓ
))
))
)
0107-001 2-64
3.53.5
3.53.5
3.5
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
Ϣ㡄ᷜ䆅䌉ԢϢ㡄ᷜ䆅䌉Ԣ
Ϣ㡄ᷜ䆅䌉ԢϢ㡄ᷜ䆅䌉Ԣ
Ϣ㡄ᷜ䆅䌉Ԣ
(BX(BX
(BX(BX
(BX
, ,
, ,
,
BYBY
BYBY
BY
))
))
)
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷᔷ
ᔷᔷ
ᔷ
33
33
3
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷᔷ
ᔷᔷ
ᔷ
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷᔷ
ᔷᔷ
ᔷ
22
22
2
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎
((
((
(
PXPX
PXPX
PX
3,3,
3,3,
3,
PYPY
PYPY
PY
33
33
3
))
))
)
(PX(PX
(PX(PX
(PX
22
22
2
,
PYPY
PYPY
PY
22
22
2
))
))
)
(PX(PX
(PX(PX
(PX
,
PYPY
PYPY
PY
))
))
)
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
(2)Operation Data((2)Operation Data(
(2)Operation Data((2)Operation Data(
(2)Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
•
P.C.B.Data(P.C.B.Data(
P.C.B.Data(P.C.B.Data(
P.C.B.Data(
ාᵔᭅාᵔᭅ
ාᵔᭅාᵔᭅ
ාᵔᭅ
))
))
)
Table 3B3Table 3B3
Table 3B3Table 3B3
Table 3B3
•
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(P.C.B.Recognition Data(
P.C.B.Recognition Data(
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅාᵔ䆛ࠀᭅ
ාᵔ䆛ࠀᭅ
))
))
)
䇌ᡟ P.E.C.recognition function(ාᵔ䆛ࠀࡴ㛒䗞ᢾ)䆓ᅯЏ
“Disable(Ϣ䆛ࠀ)”Ȣ
䇌Ϣ㽖䆓ᅯҫᭅȢ
•
P.C.B.Recognition Mark Dada(P.C.B.Recognition Mark Dada(
P.C.B.Recognition Mark Dada(P.C.B.Recognition Mark Dada(
P.C.B.Recognition Mark Dada(
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅාᵔ䆛ࠀᷜ䆅ᭅ
ාᵔ䆛ࠀᷜ䆅ᭅ
))
))
)
䇌Ϣ㽖㓫ࠋℹᭅȢ
•
Setup Data(SetupSetup Data(Setup
Setup Data(SetupSetup Data(Setup
Setup Data(Setup
ᭅᭅ
ᭅᭅ
ᭅ
))
))
)
䳕㽖Ք⫽㞿ࡽ Setup ࡴ㛒ᯋ㓫ࠋȢ
(3)(3)
(3)(3)
(3)
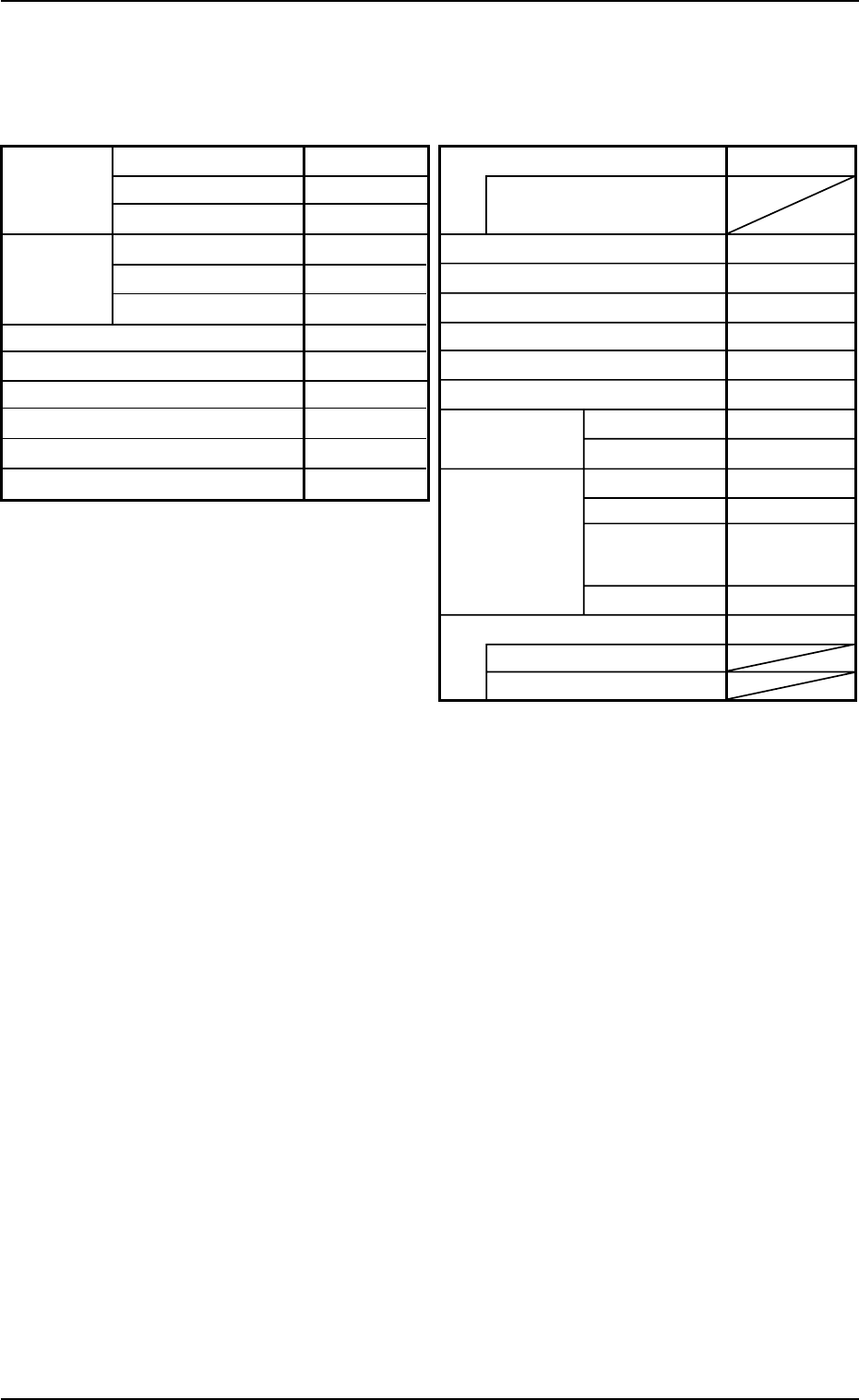
ܘӋ䜢㕃ᭅⱙ㓫ࠋܘӋ䜢㕃ᭅⱙ㓫ࠋ
ܘӋ䜢㕃ᭅⱙ㓫ࠋܘӋ䜢㕃ᭅⱙ㓫ࠋ
ܘӋ䜢㕃ᭅⱙ㓫ࠋ
ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙሏᇍȢ
0107-001 2-65
3.53.5
3.53.5
3.5
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
᳞㒙ঢ়ාᵔϢ㡄ẕ⌠ࡴ㛒
Alternate ModeAlternate Mode
Alternate ModeAlternate Mode
Alternate Mode
DisableDisable
DisableDisable
Disable
Alternate Carriage DataAlternate Carriage Data
Alternate Carriage DataAlternate Carriage Data
Alternate Carriage Data
Priority ProcessingPriority Processing
Priority ProcessingPriority Processing
Priority Processing
Feeder No. OffsetFeeder No. Offset
Feeder No. OffsetFeeder No. Offset
Feeder No. Offset
+000+000
+000+000
+000
X/Y Table Accel DesX/Y Table Accel Des
X/Y Table Accel DesX/Y Table Accel Des
X/Y Table Accel Des
Full SpeedFull Speed
Full SpeedFull Speed
Full Speed
C Accel DesC Accel Des
C Accel DesC Accel Des
C Accel Des
Full SpeedFull Speed
Full SpeedFull Speed
Full Speed
C2 Accel DesC2 Accel Des
C2 Accel DesC2 Accel Des
C2 Accel Des
Full SpeedFull Speed
Full SpeedFull Speed
Full Speed
C3 Accel DesC3 Accel Des
C3 Accel DesC3 Accel Des
C3 Accel Des
Full SpeedFull Speed
Full SpeedFull Speed
Full Speed
C4 Accel DesC4 Accel Des
C4 Accel DesC4 Accel Des
C4 Accel Des
Full SpeedFull Speed
Full SpeedFull Speed
Full Speed
RecoveryRecovery
RecoveryRecovery
Recovery
U-NU-N
U-NU-N
U-N
DisableDisable
DisableDisable
Disable
RegulationRegulation
RegulationRegulation
Regulation
BlockBlock
BlockBlock
Block
DisableDisable
DisableDisable
Disable
Unit P.C.B.B.B.RUnit P.C.B.B.B.R
Unit P.C.B.B.B.RUnit P.C.B.B.B.R
Unit P.C.B.B.B.R
ModeMode
ModeMode
Mode
StandardStandard
StandardStandard
Standard
Mark ImageMark Image
Mark ImageMark Image
Mark Image
Dark (E/NR)Dark (E/NR)
Dark (E/NR)Dark (E/NR)
Dark (E/NR)
ComponentComponent
ComponentComponent
Component
PrechuckPrechuck
PrechuckPrechuck
Prechuck
SequenceSequence
SequenceSequence
Sequence
Bad MarkBad Mark
Bad MarkBad Mark
Bad Mark
Overall P.C.B. B.B.R.Overall P.C.B. B.B.R.
Overall P.C.B. B.B.R.Overall P.C.B. B.B.R.
Overall P.C.B. B.B.R.
DisableDisable
DisableDisable
Disable
X (Horizontal)X (Horizontal)
X (Horizontal)X (Horizontal)
X (Horizontal)
Y (Vertical)Y (Vertical)
Y (Vertical)Y (Vertical)
Y (Vertical)
330.00[mm]330.00[mm]
330.00[mm]330.00[mm]
330.00[mm]
250.00[mm]250.00[mm]
250.00[mm]250.00[mm]
250.00[mm]
.6[mm].6[mm]
.6[mm].6[mm]
.6[mm]
+00.000[mm]+00.000[mm]
+00.000[mm]+00.000[mm]
+00.000[mm]
+00.000[mm]+00.000[mm]
+00.000[mm]+00.000[mm]
+00.000[mm]
+00+00
+00+00
+00
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+00.000[mm]+00.000[mm]
+00.000[mm]+00.000[mm]
+00.000[mm]
Front RightFront Right
Front RightFront Right
Front Right
00.000[mm]00.000[mm]
00.000[mm]00.000[mm]
00.000[mm]
PlacementPlacement
PlacementPlacement
Placement
StandardStandard
StandardStandard
Standard
StandardStandard
StandardStandard
Standard
P.C.B.P.C.B.
P.C.B.P.C.B.
P.C.B.
SizeSize
SizeSize
Size
X(Horizontal)X(Horizontal)
X(Horizontal)X(Horizontal)
X(Horizontal)
Y(Vertical)Y(Vertical)
Y(Vertical)Y(Vertical)
Y(Vertical)
T(Thickness)T(Thickness)
T(Thickness)T(Thickness)
T(Thickness)
X(Horizontal)X(Horizontal)
X(Horizontal)X(Horizontal)
X(Horizontal)
Y(Vertical)Y(Vertical)
Y(Vertical)Y(Vertical)
Y(Vertical)
Z=ThetaZ=Theta
Z=ThetaZ=Theta
Z=Theta
P.C.B. height offsetP.C.B. height offset
P.C.B. height offsetP.C.B. height offset
P.C.B. height offset
P.C.B. Positioning ReferenceP.C.B. Positioning Reference
P.C.B. Positioning ReferenceP.C.B. Positioning Reference
P.C.B. Positioning Reference
Pre-Placed component thicknessPre-Placed component thickness
Pre-Placed component thicknessPre-Placed component thickness
Pre-Placed component thickness
Placement modePlacement mode
Placement modePlacement mode
Placement mode
P.C.B. transfer speedP.C.B. transfer speed
P.C.B. transfer speedP.C.B. transfer speed
P.C.B. transfer speed
Placement data sortingPlacement data sorting
Placement data sortingPlacement data sorting
Placement data sorting
P.C.B.P.C.B.
P.C.B.P.C.B.
P.C.B.
OriginOrigin
OriginOrigin
Origin
OffsetOffset
OffsetOffset
Offset
DisableDisable
DisableDisable
Disable