Program.x200.pdf - 第88页
3.7 3.7 3.7 3.7 3.7 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ 䞢Ḍᵔᔷ ( ( ( ( ( ᵖഥᷜভᤷࡴ㛒 ᵖഥᷜভᤷࡴ㛒 ᵖഥᷜভᤷࡴ㛒 ᵖഥᷜভᤷࡴ㛒 ᵖഥᷜভᤷࡴ㛒 ) ) ) ) ) 㓫ࠋᮎ⊪䰹ᅞ㺚ᭅ (O) ͼϣ “ 3.3 䞢Ḍᵔᔷ ( ᳞㒙ঢ়䆛ࠀ ) ” ⳍৡȢ ( ) ( ) ( ) ( ) ( ) Pattern Program Pattern Prog…

ܘӋᅞ㺚乏ᑤܘӋᅞ㺚乏ᑤ
ܘӋᅞ㺚乏ᑤܘӋᅞ㺚乏ᑤ
ܘӋᅞ㺚乏ᑤ
ңޤ䗴ᇦⱙ(XY 䗴ᑻ) ܘӋᓕྠᅞ㺚ͼབྷϠΊ
Ḍᵔᔷ (C ˧ C2)˧Ḍᵔᔷ 2(C ˧ C2)˧Ḍᵔᔷ 3(C ˧ C2)˧
Ḍᵔᔷ 3(C3 ˧ C4)˧Ḍᵔᔷ 2(C3 ˧ C4)˧Ḍᵔᔷ (C3 ˧ C4)˧
Ḍᵔᔷ (C5 ˧ C6)˧Ḍᵔᔷ 2(C5 ˧ C6)˧Ḍᵔᔷ 3(C5 ˧ C6)˧
Placement Data(Placement Data(
Placement Data(Placement Data(
Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(O-data))(O-data)
)(O-data))(O-data)
)(O-data)
ᣞ✼䗯ᐍⱙᮎ⊪㓫ࠋȢ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ҺϠܘӋᭅᑨᭅдӯᕆઢᅞ㺚䗴ᑻͼᭁ䇌গ㗘Ȣ
Speed DataSpeed Data
Speed DataSpeed Data
Speed Data
Pick-Up[sec](ᅞ㺚༉䰙)ȡRotary turret[sec](ᅞ㺚
༉ӵ䗖ȡPlacement[sec](ᅞ㺚༉ᅞ㺚)ȡFeeder carriage
(䗖᭮ఽ⒦ᵔ)ȡRecognition time[sec](䆛ࠀᯋ䯉)
䗴ᑻᭅⱙ䆻㒛ݚᆎͼ䇌গ✼ⱙ᪢Ա䇉ᯣл “ ܘӋ
ᭅᑨ(TCM-X ㋐߬)”Ȣ
0107-001 2-69
Note
3.63.6
3.63.6
3.6
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩ
))
))
)
((
((
(
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ
))
))
)
3.73.7
3.73.7
3.7
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ᵖഥᷜভᤷࡴ㛒ᵖഥᷜভᤷࡴ㛒
ᵖഥᷜভᤷࡴ㛒ᵖഥᷜভᤷࡴ㛒
ᵖഥᷜভᤷࡴ㛒
))
))
)
㓫ࠋᮎ⊪䰹ᅞ㺚ᭅ(O)ͼϣ “3.3 䞢Ḍᵔᔷ( ᳞㒙ঢ়䆛ࠀ) ”
ⳍৡȢ
( )( )
( )( )
( )
Pattern ProgramPattern Program
Pattern ProgramPattern Program
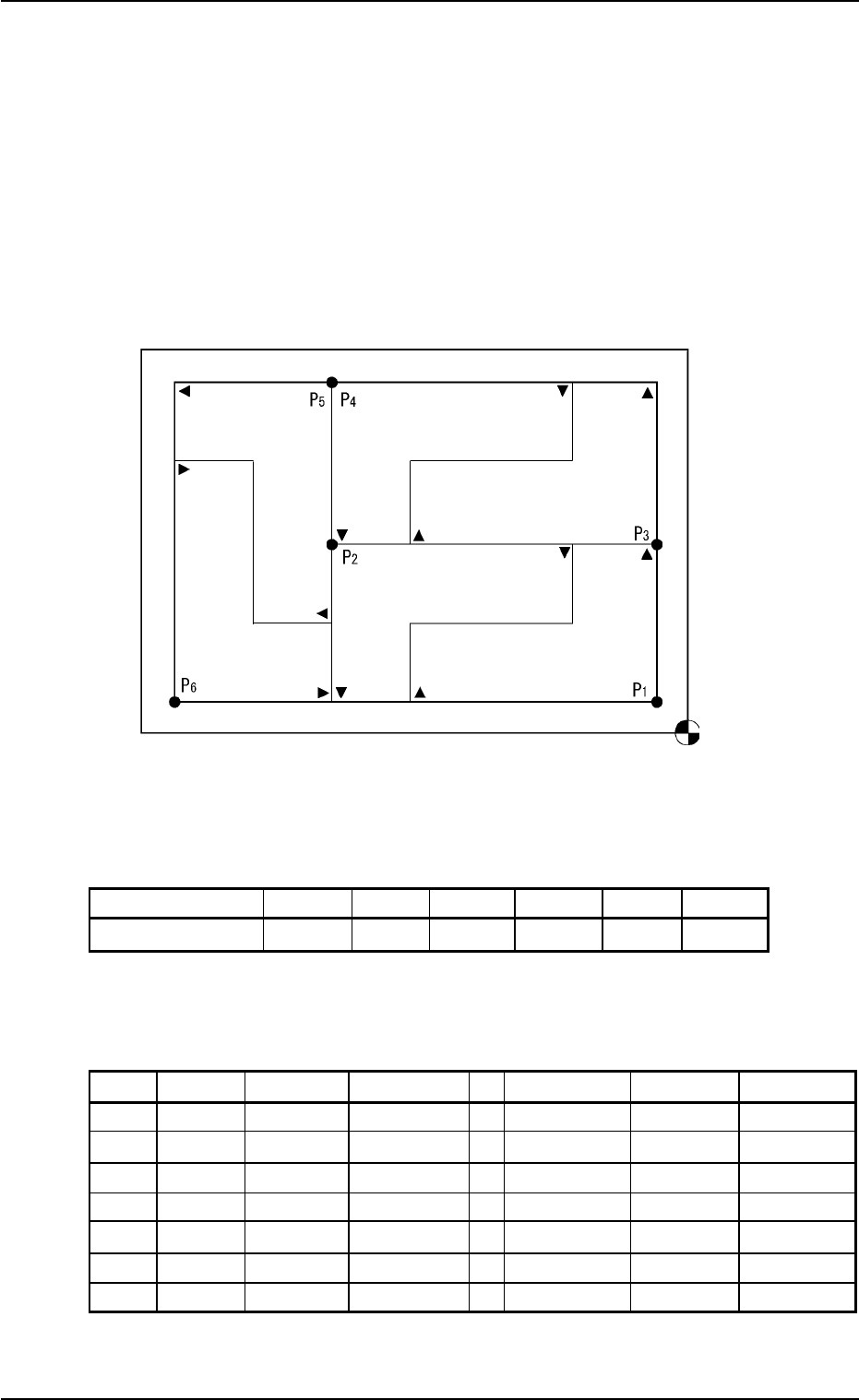
Pattern Program
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ
•
ḌᵔᔷՠḌᵔᔷՠ
ḌᵔᔷՠḌᵔᔷՠ
Ḍᵔᔷՠ
Fig.3B 29Fig.3B 29
Fig.3B 29Fig.3B 29
Fig.3B 29
•
Ḍᵔᔷॴ⚎ഥᷜḌᵔᔷॴ⚎ഥᷜ
Ḍᵔᔷॴ⚎ഥᷜḌᵔᔷॴ⚎ഥᷜ
Ḍᵔᔷॴ⚎ഥᷜ
Table 3B35Table 3B35
Table 3B35Table 3B35
Table 3B35
Pattern OriginPattern Origin
Pattern OriginPattern Origin
Pattern Origin
P P
P P
P
PP
PP
P
22
22
2
PP
PP
P
33
33
3
PP
PP
P
44
44
4
PP
PP
P
55
55
5
PP
PP
P
66
66
6
ഥᷜഥᷜ
ഥᷜഥᷜ
ഥᷜ
(X(X
(X(X
(X
,Y,Y
,Y,Y
,Y
))
))
)
(X(X
(X(X
(X
22
22
2
,Y,Y
,Y,Y
,Y
22
22
2
))
))
)
(X(X
(X(X
(X
,Y,Y
,Y,Y
,Y
22
22
2
) (X) (X
) (X) (X
) (X
22
22
2
,Y,Y
,Y,Y
,Y
33
33
3
))
))
)
(X(X
(X(X
(X
22
22
2
,Y,Y
,Y,Y
,Y
33
33
3
) (X) (X
) (X) (X
) (X
33
33
3
,Y,Y
,Y,Y
,Y
))
))
)
(2)(2)
(2)(2)
(2)
Placement Data(Placement Data(
Placement Data(Placement Data(
Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(O-data))(O-data)
)(O-data))(O-data)
)(O-data)
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
Table 3B36Table 3B36
Table 3B36Table 3B36
Table 3B36
O-No.O-No.
O-No.O-No.
O-No.
X X
X X
X
[mm] Y[mm][mm] Y[mm]
[mm] Y[mm][mm] Y[mm]
[mm] Y[mm]
Z Z
Z Z
Z
CC
CC
C
CommentComment
CommentComment
Comment
B-X[mm] B-Y[mm] B-X[mm] B-Y[mm]
B-X[mm] B-Y[mm] B-X[mm] B-Y[mm]
B-X[mm] B-Y[mm]
X X
X X
X
Y Y
Y Y
Y
000 000
000 000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
22
22
2
X X
X X
X
22
22
2
Y Y
Y Y
Y
22
22
2
8080
8080
80
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
33
33
3
X X
X X
X
Y Y
Y Y
Y
22
22
2
000 000
000 000
000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
44
44
4
X X
X X
X
22
22
2
Y Y
Y Y
Y
33
33
3
8080
8080
80
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
55
55
5
X X
X X
X
22
22
2
Y Y
Y Y
Y
33
33
3
090 090
090 090
090
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
66
66
6
X X
X X
X
33
33
3
Y Y
Y Y
Y
270 270
270 270
270
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
--
--
-
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
77
77
7
000.00000.00
000.00000.00
000.00
000.00 000000.00 000
000.00 000000.00 000
000.00 000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
EE
EE
E
000.00000.00
000.00000.00
000.00
000.00 000.00
000.00 000.00
000.00
0107-001 2-70
3.73.7
3.73.7
3.7
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ᵖഥᷜভᤷࡴ㛒ᵖഥᷜভᤷࡴ㛒
ᵖഥᷜভᤷࡴ㛒ᵖഥᷜভᤷࡴ㛒
ᵖഥᷜভᤷࡴ㛒
))
))
)
̵
ᰄාᵔ䆛ࠀᷜ䆅Ȣᰄාᵔ䆛ࠀᷜ䆅Ȣ
ᰄාᵔ䆛ࠀᷜ䆅Ȣᰄාᵔ䆛ࠀᷜ䆅Ȣ
ᰄාᵔ䆛ࠀᷜ䆅Ȣ
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷᔷ
ᔷᔷ
ᔷ
ЏЏ
ЏЏ
Џ
ȋȋ
ȋȋ
ȋ
ȢȢ
ȢȢ
Ȣ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
55
55
5
(90(90
(90(90
(90
ȋȋ
ȋȋ
ȋ
))
))
)
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
66
66
6
(270(270
(270(270
(270
ȋȋ
ȋȋ
ȋ
))
))
)
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
4( 804( 80
4( 804( 80
4( 80
ȋȋ
ȋȋ
ȋ
))
))
)
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
33
33
3
(0(0
(0(0
(0
ȋȋ
ȋȋ
ȋ
))
))
)
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
2( 802( 80
2( 802( 80
2( 80
ȋȋ
ȋȋ
ȋ
))
))
)
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
(0 (0
(0 (0
(0
ȋȋ
ȋȋ
ȋ
))
))
)
3.83.8
3.83.8
3.8
ᓗᴏ⾢⏌䕒ᔷᓗᴏ⾢⏌䕒ᔷ
ᓗᴏ⾢⏌䕒ᔷᓗᴏ⾢⏌䕒ᔷ
ᓗᴏ⾢⏌䕒ᔷ
( )( )
( )( )
( )
Pattern ProgramPattern Program
Pattern ProgramPattern Program
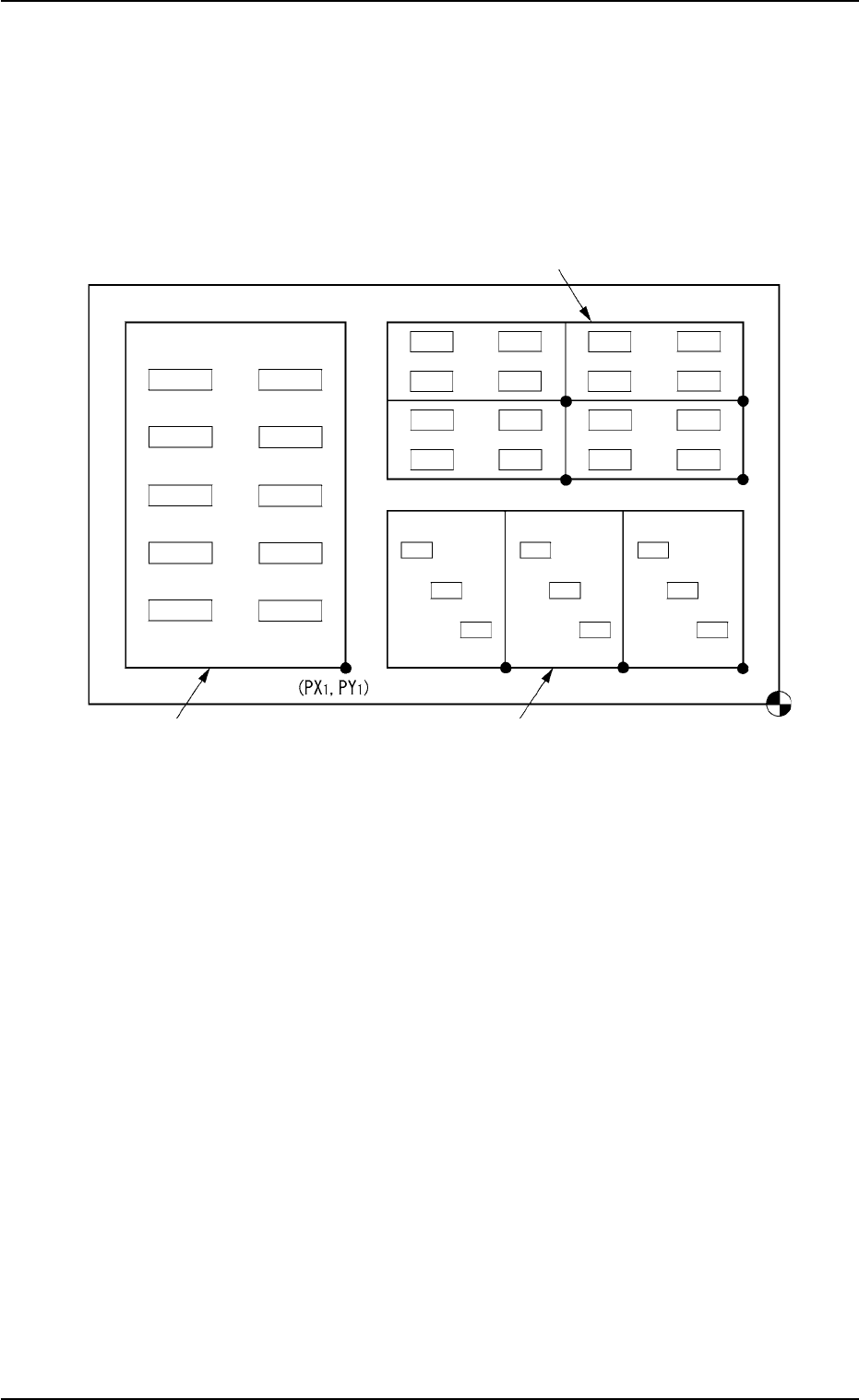
Pattern Program
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ
•
ḌᵔᔷՠḌᵔᔷՠ
ḌᵔᔷՠḌᵔᔷՠ
Ḍᵔᔷՠ
ϠЏ᳞ᴏ⾢ A ȡB C ⱙᭅȢ
Fig.3B 30Fig.3B 30
Fig.3B 30Fig.3B 30
Fig.3B 30
(2)(2)
(2)(2)
(2)
OperationOperation
OperationOperation
Operation
Data(Data(
Data(Data(
Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
䇌ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙᭅȢ
ԛᴏ⾢ A ȡB Һট C Џ݆ҀᭅȢ
⊽⊽
⊽⊽
⊽
ΊΊ
ΊΊ
ΊՔ⫽Unit P.C.B. B.B.R.(㒙ঢ়ාᵔϢ㡄ẕ⌠) P.E.C.
recognition function(ාᵔ䆛ࠀࡴ㛒)ᯋͼ䇌䆓ᅯℸ⹃ⱙ
ᭅȢ
(3)(3)
(3)(3)
(3)
Placement Feeder Location Data(Placement Feeder Location Data(
Placement Feeder Location Data(Placement Feeder Location Data(
Placement Feeder Location Data(
ܘӋ䜢㕃ᭅܘӋ䜢㕃ᭅ
ܘӋ䜢㕃ᭅܘӋ䜢㕃ᭅ
ܘӋ䜢㕃ᭅ
))
))
)
ⱙⱙ
ⱙⱙ
ⱙ
㓫ࠋ㓫ࠋ
㓫ࠋ㓫ࠋ
㓫ࠋ
䇌ࠋԱϣ “3. पϿḌᵔᔷ ” ⳍৡⱙᭅȢ
ԛᴏ⾢ A ȡB Һট C Џ݆ҀᭅȢ
0107-001 2-71
3.83.8
3.83.8
3.8
ᓗᴏ⾢⏌䕒ᔷᓗᴏ⾢⏌䕒ᔷ
ᓗᴏ⾢⏌䕒ᔷᓗᴏ⾢⏌䕒ᔷ
ᓗᴏ⾢⏌䕒ᔷ
ᴏ⾢ᴏ⾢
ᴏ⾢ᴏ⾢
ᴏ⾢
AA
AA
A
ᴏ⾢ᴏ⾢
ᴏ⾢ᴏ⾢
ᴏ⾢
BB
BB
B
ᴏ⾢ᴏ⾢
ᴏ⾢ᴏ⾢
ᴏ⾢
CC
CC
C
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
((
((
( ̻
ᰄᰄ
ᰄᰄ
ᰄ
ḌᵔḌᵔ
ḌᵔḌᵔ
Ḍᵔ
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎ᔷॴ⚎
ᔷॴ⚎
))
))
)