富兴智能立式插件机R系列说明书.pdf.pdf - 第134页
深圳市富兴智能装备有限公司 http:// www .fuxingai.com http:// www.fxznsmt.com - 133 - 正/负旋转补偿 RX: 当准备下插的元件需要转角度,而转角度后实际坐标与相机捕捉到 的位置的 X 坐标有偏差时,可以通过此参数来调整。 正/负旋转补偿 RY: 当准备下插的元件需要转角度,而转角度后实际坐标与相机捕捉到 的位置的 Y 坐标有偏差时,可以通过此参数来调整。 Push 速度: 机器下…
深圳市富兴智能装备有限公司
http:// www.fuxingai.com
http:// www.fxznsmt.com
- 132 -
12、 数值上的调整。
单击 设置 弹出下拉菜单。包括有设备参数和元件参数二个部分。(如下图)
1) 设备参数(如图):
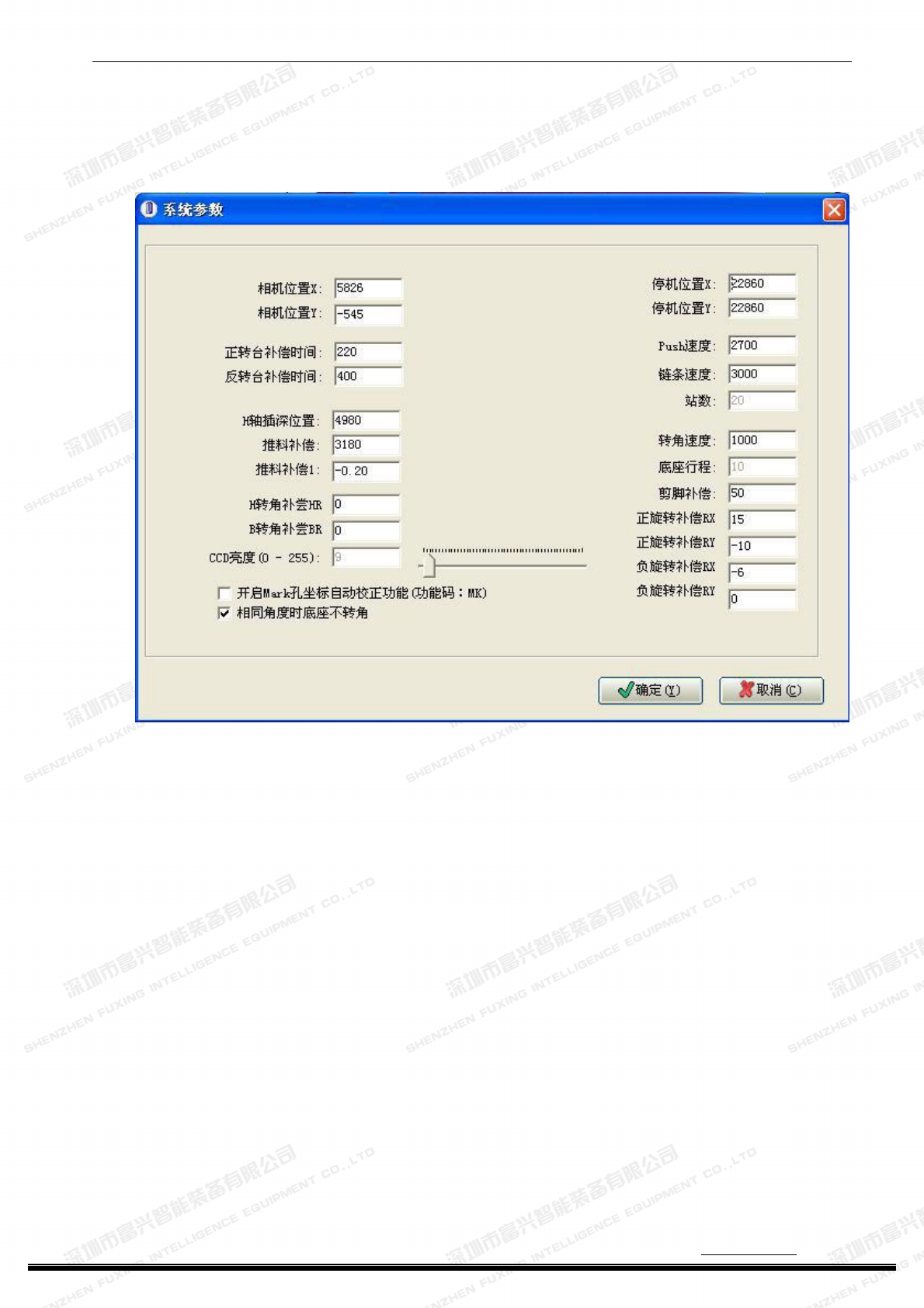
机器的所有参数调整都在“设备参数”里进行,包括相机位置 CX 和 CY、H 插深补偿 HL、
推料补偿 PL、转角补偿 HR/BR、停机位置 X/Y、正(TCW)/反(TCCW)转台补偿、Push 速度、
Chain 速度、旋转补偿 RX/RY、相机亮度调节等。当修改了其中的参数后点击应用、保存再点
返回即可。
元件参数是插入的元件描述的集合,它是将插件程序中所有元件按一定的归
类并描述元件体特征。
相机位置 CX:X 轴方向相机零点位置。
相机位置 CY:Y 轴方向相机零点位置。
H 插深补偿 HL:插件头下插到 PCB 板深度补偿。
推料补偿 PL:推料杆下压的行程补偿。
H 转角补尝 HR:插件头下插时的转角补偿
B 转角补尝 BR: 底座上升剪脚时的转角补偿
正转台补尝时间: 正方向马达旋转时间补偿。逆
转台补尝时间: 反方向马达旋转时间补偿。
停机位置 X: X 轴方向插件头停机位置。(22860 为工作台中心坐标)
停机位置 Y: Y 轴方向插见头停机位置。(22860 为工作台中心坐标)
深圳市富兴智能装备有限公司
http:// www.fuxingai.com
http:// www.fxznsmt.com
- 133 -
正/负旋转补偿 RX: 当准备下插的元件需要转角度,而转角度后实际坐标与相机捕捉到
的位置的 X 坐标有偏差时,可以通过此参数来调整。
正/负旋转补偿 RY: 当准备下插的元件需要转角度,而转角度后实际坐标与相机捕捉到
的位置的 Y 坐标有偏差时,可以通过此参数来调整。
Push 速度: 机器下压料的速度调节。
链条速度: 机器链条运行的速度调节。
相机亮度调节: 可以调节相机光源的亮暗度。
保存: 保存修改好的参数。
取消: 退出当前,返回上一级操作系统界面。
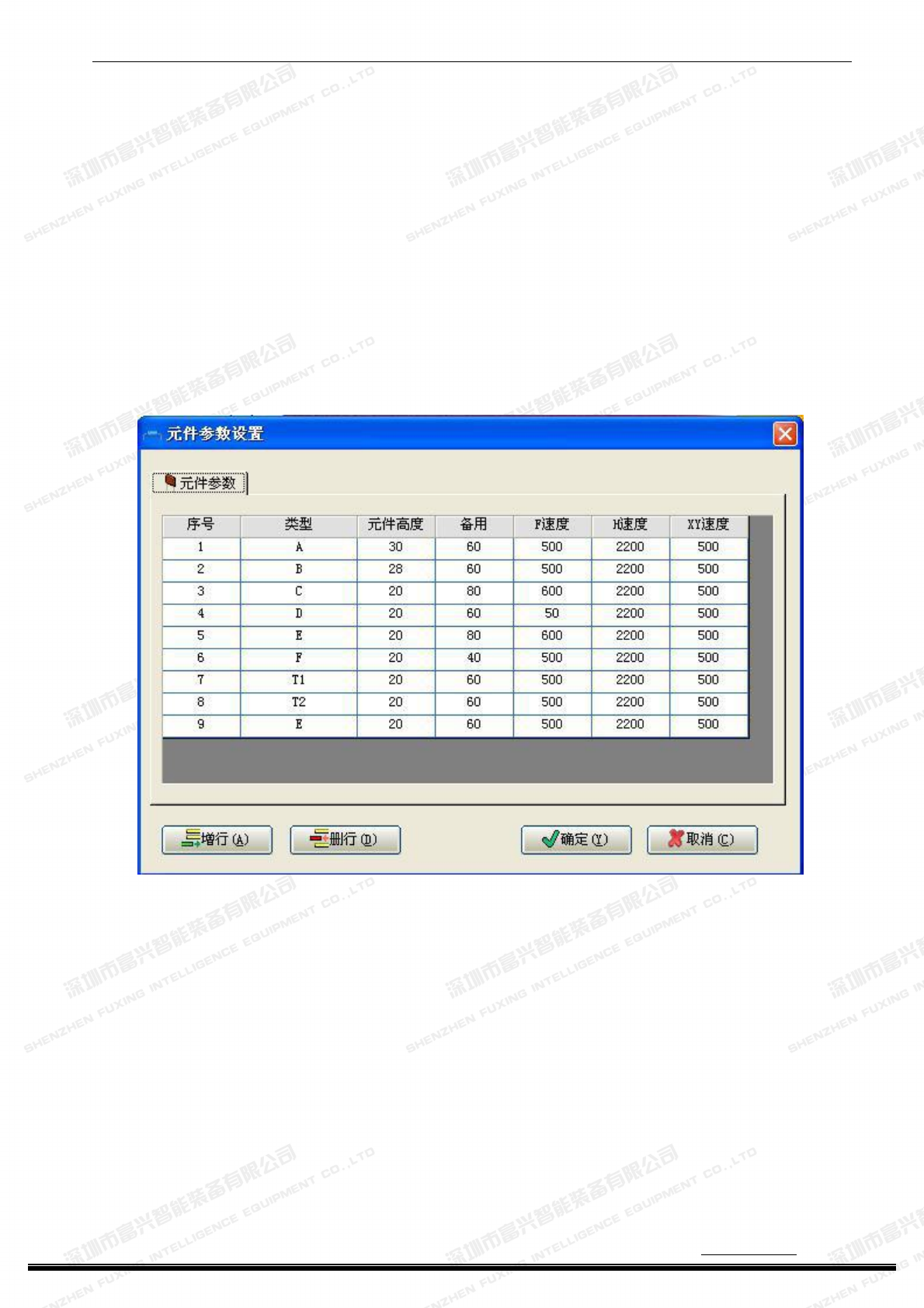
2) 元件参数 单击它会显示以下参数(如图)
:
序号: 元件的序号。
型号: 元件的型号类型。零
件高: 零件本体的高度。F
速度: CTA 送料的速度。 H
速度: 插件头下插的速度。
XY 速度: 工作台移动的速度。
确认:保存修改好的参数。
取消:退出当前,返回上一级操作系统界面。

深圳市富兴智能装备有限公司
http:// www.fuxingai.com
http:// www.fxznsmt.com
- 134 -
3) 开关电源的调整。
本机器使用直流 24、5 伏电压,由独立的开关电源提供。
(1)开关电源的输入电压有 220 和 110 伏可调,本机器使用 220 伏电压,已调好,请勿调整。
(2)输出电压可以微调到等于、大于或小于标称值。用万用表监测
输出,用一字螺丝刀旋转调节钮,顺时针旋转是增大,逆时针旋转是减小
5)相机的调整。
注意:相机属精密部件,直接影响坐标和
H
轴的插入位置,严禁随意拆卸和调整。
(1)高度 相机的高度决定了物距和焦距。先粗调,我们规定:相机机身的底面到电路板
的距离在 148 毫米左右。再细调,要配上专用测量尺,在影校下操作,选定 1、5 或 10 毫米
为单位距离,每点击一次,看画面上的光标是否在测量尺的刻度上面相应移动那麽多距离, 如果不
是,就要上下调节相机的位置,如果调节相机的位置满足不了需求,就要调节焦距和物距,直到相
吻合,然后,固定。
请注意:当移动了相机位置时,“设备参数”里的 H 轴参数有可能也要进行修正。因为
那些参数是以相机为“零点”。
(2) 焦距 在镜头上可以调节。自上而下,第 一 个用来调物距,顺、逆时针旋转,以图
像清晰为基本标准,再看光标移动距离是否和测量尺一致,然后锁定。
(3)物距 在镜头上可以调节。自上而下,第 二 个用来调物距,顺、逆时针旋转,以图
像清晰为基本标准,再看光标移动距离是否和测量尺一致,然后锁定。
6)飞达检测光电开关的调整。
左、右飞达检测光电开关分为投光器和受光器两部分,有效检测距离是 15 米。
(1)投光器:发出不可见红外光。有一个电源显示灯。
(2)受光器:设有电源显示灯(绿色)、信号显示灯(橙色))、灵敏度调整节钮(min—
max——向 max 方向调是增大、输出信号切换开关(D︿L)——我们设置在 D。
3)通过调整固定架使投光器的光投到受光器上。而且保证飞达在没退到安全位置时,在检测
信号的作用下,链条不再跑动,机器被安全保护。