SI-F130AI_1st_CS.pdf.pdf - 第186页
操作篇 5. 手动操作 5-16 SI-F130AI 5.2.2 基板操作 5.2.2. 1 基 板定位操作 5.2.2. 2 基 板搬入、搬出操作 5.2.1 基板搬送轨道的操作 [ 概要 ] …

操作篇
5. 手动操作
SI-F130AI
5-15
5.2 基板搬送操作
2
5.2.1 基板搬送轨道的操作
( )
5.2.1.1 搬入轨道运转
5.2.1.2 装着轨道运转
5.2.1.3 搬出轨道运转
5.2.1.4 固定板装置操作
5.2.1.5 基准针操作
5.2.1.6 停止器操作
5.2.1.7 轨道宽度的调整
5.2.1.8 基板搬送状态的表示
5.2.1.9 排出器的移动
5.2.1.10 排出器的操作 (上升 / 下降)
操作篇
5. 手动操作
5-16
SI-F130AI
5.2.2 基板操作
5.2.2.1 基板定位操作
5.2.2.2 基板搬入、搬出操作
5.2.1 基板搬送轨道的操作
[ 概要 ]
[ 操作顺序 ]
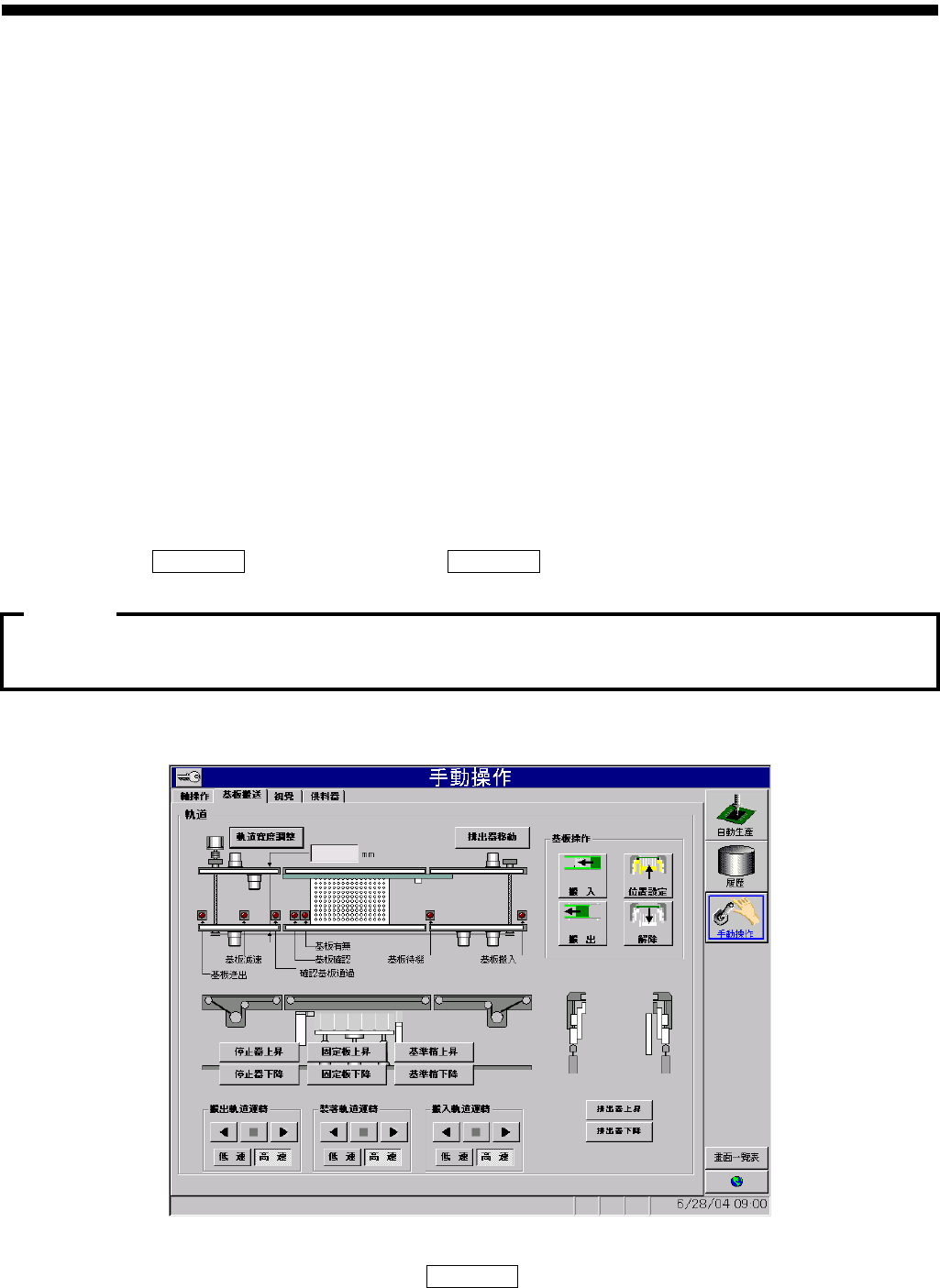
手動操作 ( ) 基板搬送 ( )
基板的进行方向在
SI-F130AI
有左流向 (→)及右流向 (←)
2
种规格。依规格会出现不同
画面。
图
5.2.1
手動操作- 基板搬送
(
手动操作- 基板搬送
)
画面
基板搬送 ( )
注意 :
操作篇
5. 手动操作
SI-F130AI
5-17
5.2.1.1 搬入轨道运转 (使用 搬入軌道運轉 ( 搬入轨道运转 ) 框)
搬入軌道運轉 ( ) 高速 ( ) 低速 ( )
欲使搬出方向
( 正方向 ) 的轨道动作时
搬入軌道運轉 ( )
欲使搬入方向
( 反方向 ) 的轨道动作时
搬入軌道運轉 ( )
停止轨道时
搬入軌道運轉 ( )
提示
5.2.1.2 装着轨道运转 (使用 裝著軌道運轉 ( 装着轨道运转 ) 框)
裝著軌道運轉 ( ) 高速 ( ) 低速 ( )
在搬出方向
( 正方向 ) 使轨道运转时
裝著軌道運轉 ( )
在搬入方向
( 反方向 ) 使轨道运转时
裝著軌道運轉 ( )
停止轨道运转时
裝著軌道運轉 ( )
提示