SI-F130AI_1st_CS.pdf.pdf - 第193页
操作篇 5. 手动操作 SI-F130AI 5-23 5.2.1. 8 基板 搬送状态的表示 ·关于轨道皮带 的表示颜色: ·关于各按钮的文字 颜色: …
操作篇
5. 手动操作
5-22
SI-F130AI
(3)
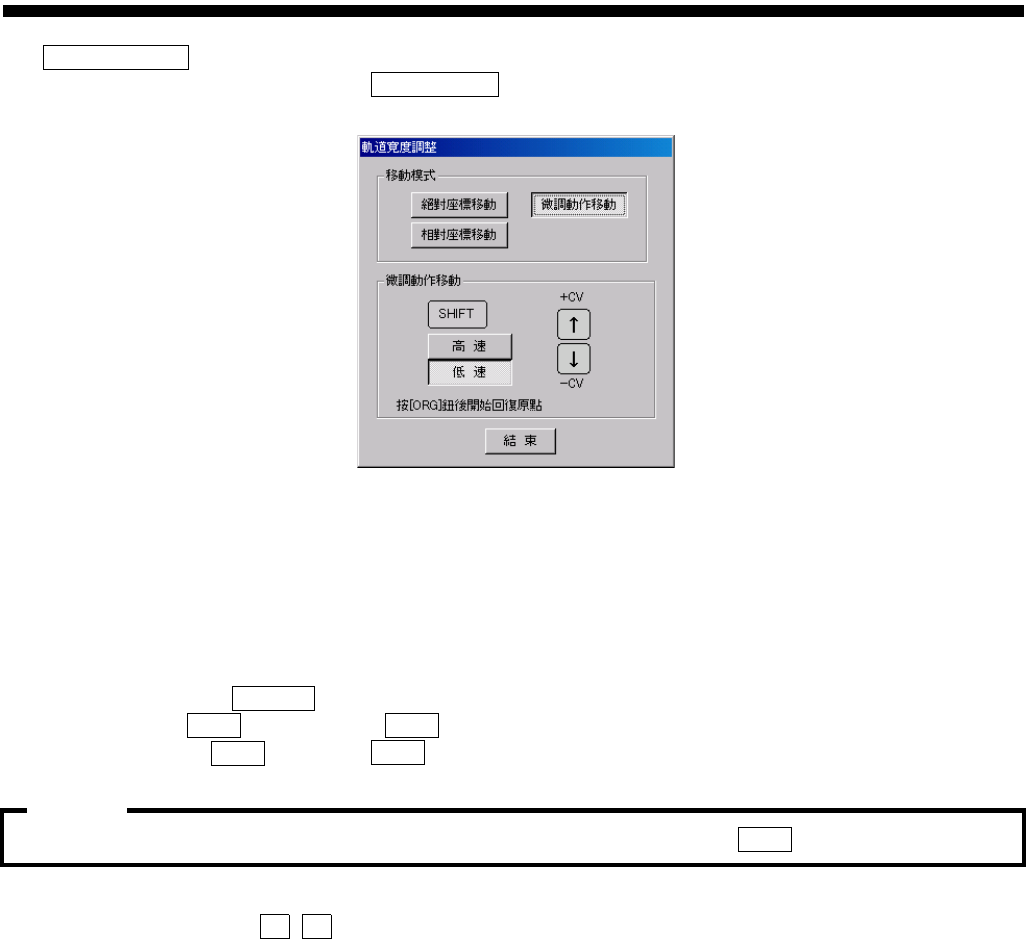
微調動作移動 ( 微调动作移动 ) (轨道宽度)
軌道寬度調整 ( )
图
5.2.1.7-2
軌道寬度調整
(
轨道宽度调整
)
画面
[1] 指定移动速度。
2
1 SHIFT
2 高速 ( ) 低速 ( )
高速 ( ) / 低速 ( )
前门或后门中任一门打开
或互锁开关关闭时
,
为了安全
,
无法选择
高速
(
高速
)
。
[2] 按键盘的游标 ( ↑ ↓ )
提示
1 ( )
注意 :

操作篇
5. 手动操作
SI-F130AI
5-23
5.2.1.8 基板搬送状态的表示
·关于轨道皮带的表示颜色:
·关于各按钮的文字颜色:
·关于固定板、基准针、停止器、夹板的表示颜色:
·关于安装在轨道上的下述传感器开关状态的表示:
LED
基板搬入传感器
基板搬出传感器
基板待机传感器
基板确认传感器
基板有无传感器
基板确认通过传感器
操作篇
5. 手动操作
5-24
SI-F130AI
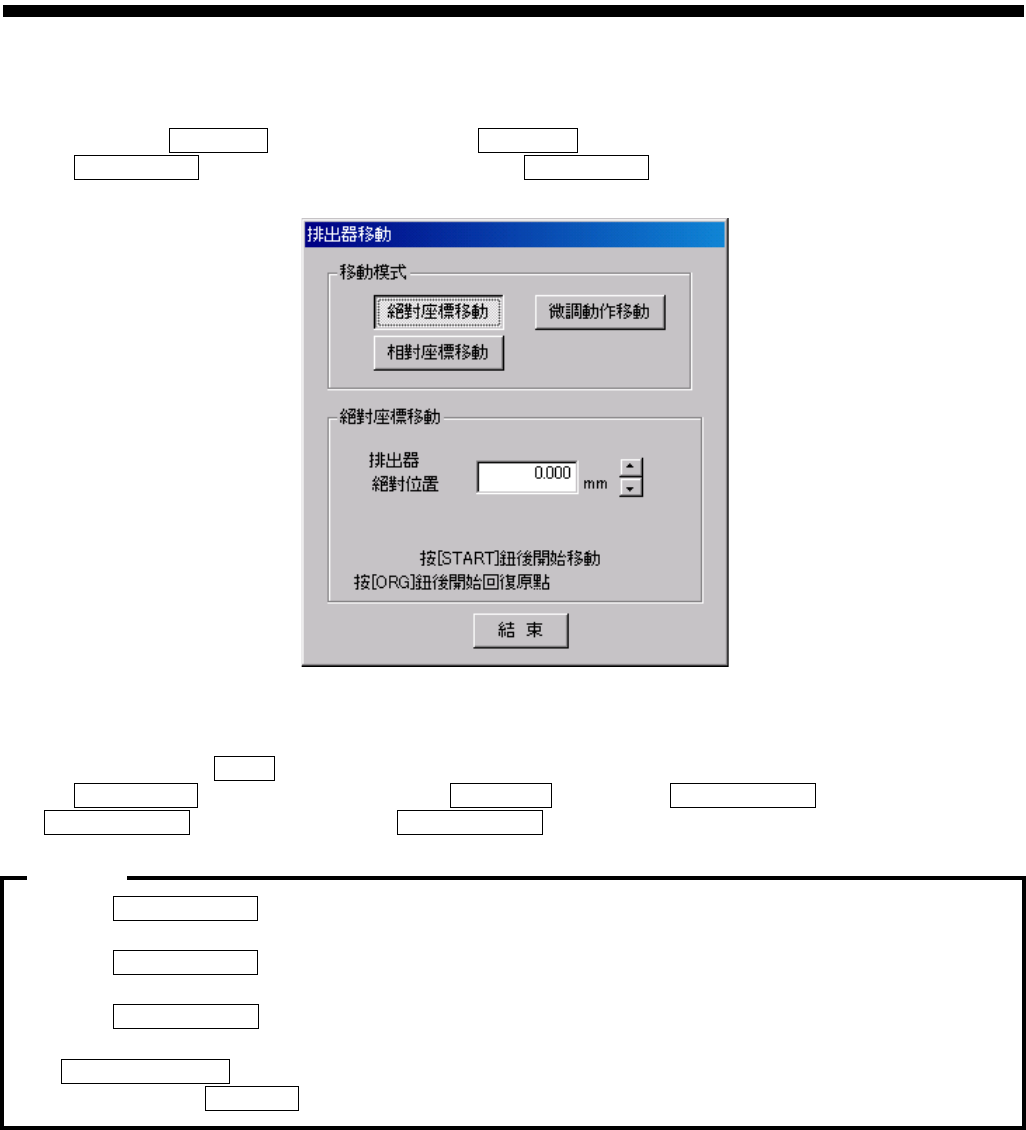
5.2.1.9
排出器的移动
手動操作 ( ) 基板搬送 ( )
排出器移動 ( ) 排出器移動 ( )
图
5.2.1.9-1
排出器移動
(
排出器移动
)
画面
ORG
排出器移動 ( ) 絕對座標移動 ( )
相對座標移動 ( ) 微調動作移動 ( )
·所谓
絕對座標移動
(
绝对坐标移动
)
是将排出器的基准点设为原点,由原点移动至表示的目
标
,
现在位置无论在何处,都可移动至目标。
·所谓
相對座標移動
(
相对坐标移动
)
是将现在的设为起点,只移动指定的值。即使相同移动
值,若改变现在时,所得到轨道也不相同。
·所谓
微調動作移動
(
微调动作移动
)
是使用游标执行移动,按游标并立即放开时会立即微
动,连续按时
,
则连续移动。
·
排出器絕對位置
(
排出器绝对位置
)
的文本框中,只能输入数值,无法变更排出器。
依右项顺序按
START
钮,执行排出器移动。
注意 :