SI-F130AI_1st_CS.pdf.pdf - 第655页
手动控制器篇 4. 操作说明 SI-F130AI 4-25 (2) Re lative Mov e H Relative Move [1] 2 ( ) 图 4-22 [2] H DH : (...) [3] TRG …
手动控制器篇
4. 操作说明
4-24
SI-F130AI
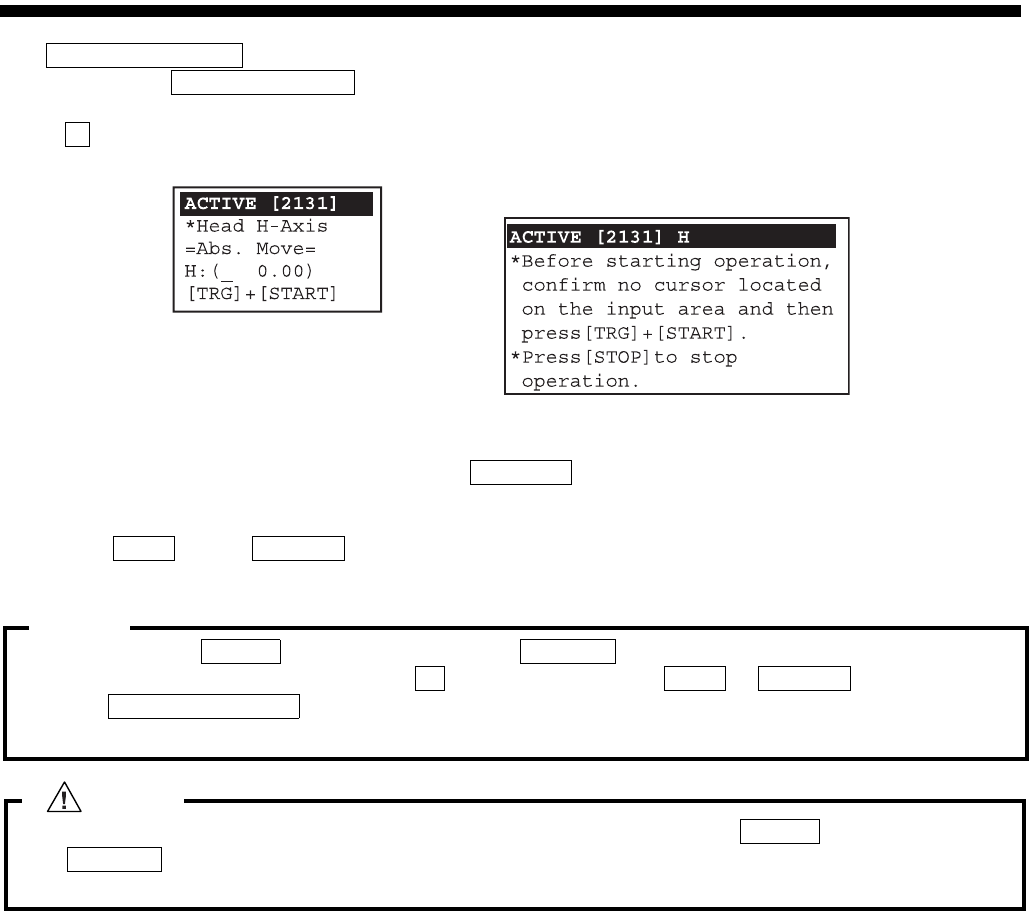
(1) Absolute Move
H Absolute Move
[1] 1 ( )
图
4-21
[2]
H H : (...)
[3] TRG START
H
·移动中如果按
STOP
,立即停止,即使再按
START
也不能移动。
·吸嘴头
H
轴的输入中,如果游标在
H
轴输入栏中,如果按
TRG
和
START
,不移动。
·所谓
Absolute Move
,就是把
SI-F130AI
基点作为原点坐标,向所示的目标位置移动,
无论现在位置在何处,都向目标位置移动。
机体操作板上进行绝对坐标移动时和手动控制器不同,移动中即使按
STOP
停止操作,再次
按
START
,重新开始向目标位置移动。开启安全门作业,请十分注意安全,不要因操作错误
导致撞到头部而受伤或机器损坏。
帮助画面
注意 :
警告 :
手动控制器篇
4. 操作说明
SI-F130AI
4-25
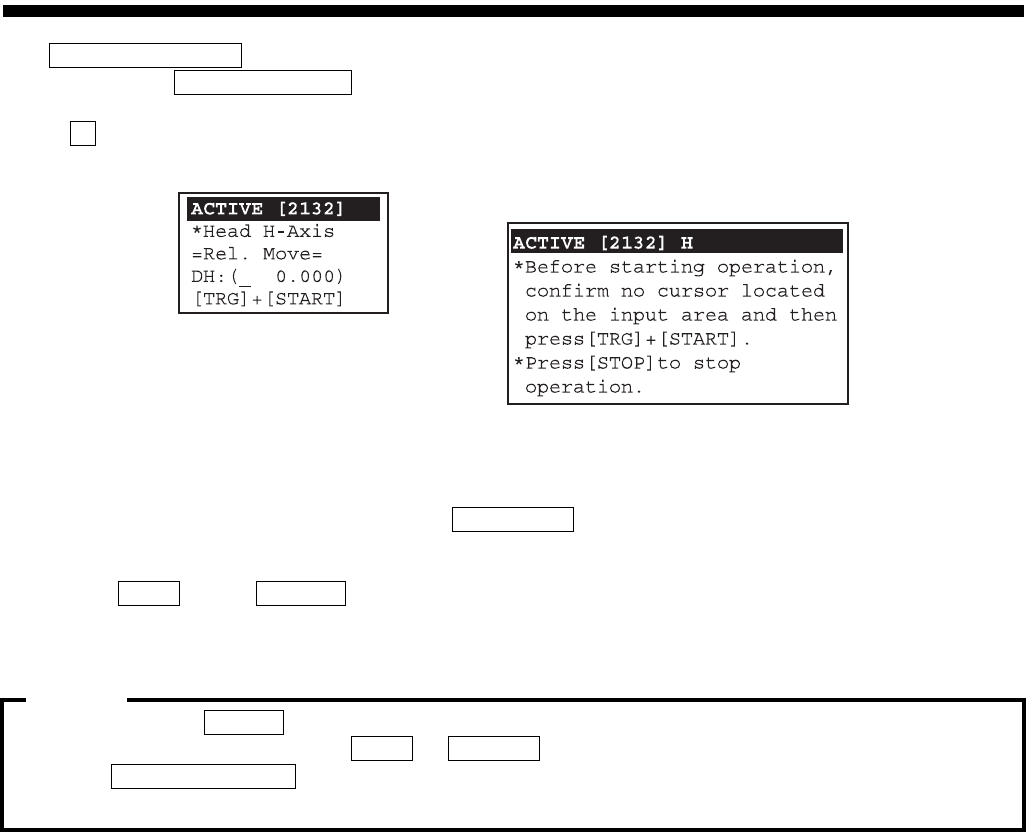
(2) Relative Move
H Relative Move
[1] 2 ( )
图
4-22
[2]
H DH : (...)
[3] TRG START
H
·移动中如果按
STOP
,立即停止。
·吸嘴头
H
轴输入中,如果按
TRG
和
START
不移动。
·所谓
Relative Move
,就是仅把现在位置作为起点移动指定的移动量。
即使是相同移动距离,但如果现在位置不同,到达点也不同。
帮助画面
注意 :
手动控制器篇
4. 操作说明
4-26
SI-F130AI
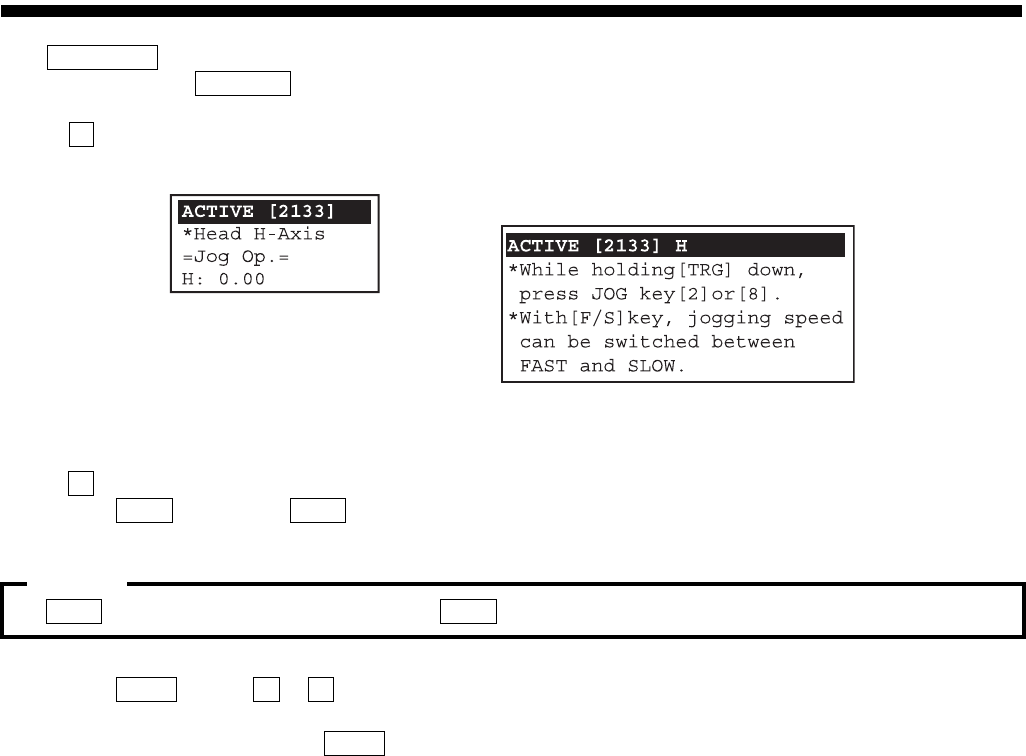
(3) Jog Op.
H Jog Op.
[1] 3 ( )
图
4-23
[2]
5 (F/S)
低速 ( ) 高速 ( )
低速
(
低速
)
时绿色
LED
慢速闪动
高速
(
高速
)
时绿色
LED
快速闪动。
[3] TRG 2 8 ( )
H H
TRG
帮助画面
注意 :