SI-F130AI_1st_CS.pdf.pdf - 第88页
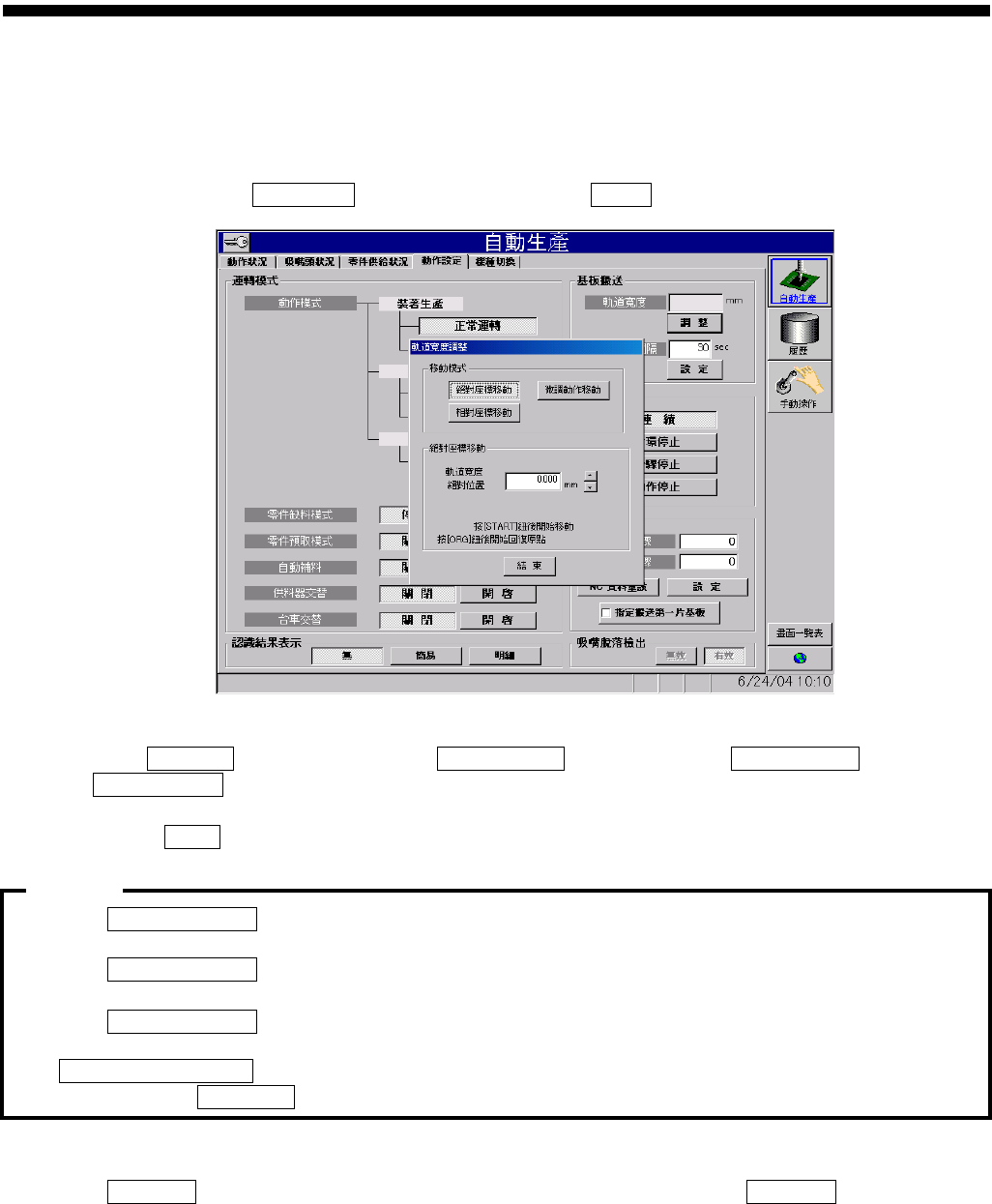
操作篇 4. 自动生产 4-14 SI-F130AI 4.2.2 基板搬送设定 [ 操作顺序 ] (1) 轨道宽度的调整 基板搬送 ( ) 調整 ( ) 图 4.2.2 自動生產-動 作設定 ( 自动生产 -动作设定 ) 画面 …
操作篇
4. 自动生产
SI-F130AI
4-13
零件缺料模式 ( )
停止
( ):
連續
( ):
零件預取模式 ( )
關閉
( ):
開啟
( ):
自動補料 ( )
關閉 ( )
開啟
( )
SI-F130AI
關閉
( ):
開啟
( ):
供料器交替 ( )
SI-F130AI 1
,
關閉
( ):
開啟
( ):
台車交替 ( )
關閉
( ):
開啟
( ):
·设定 台車交替
(
台车交替
)
开启时,台车
(
选配
)
必须前后安装。另,在机种资料的零件供
给部资料中,只须制作任一方前侧或后侧的资料即可。
·自动运转中无法变更动作模式。
·零件装着中
,
在自动运转停止时
,
即可变更动作模式。
·使用不良标记的机种资料时,即使设定开启 零件預取模式
(
零件预取模式
)
,也无法实行预
取动作。
·动作模式的设定也可以从动作状态画面上执行。关于从动作状态画面上的操作,请参照
[4.3.7
动作状况画面的说明
]
。
注意
:
操作篇
4. 自动生产
4-14
SI-F130AI
4.2.2 基板搬送设定
[ 操作顺序 ]
(1)
轨道宽度的调整
基板搬送
( ) 調整 ( )
图
4.2.2
自動生產-動作設定
(
自动生产-动作设定
)
画面
移動模式 ( ) 絕對座標移動 ( ) 相對座標移動 (
) 微調動作移動 ( )
ORG
·所谓 絕對座標移動
(
绝对坐标移动
)
为将轨道宽度的基准点当原点,由原点移往设定框内表
示的目标轨道宽度。不论现在位置在何处移动至目标宽度。
·所谓 相對座標移動
(
相对坐标移动
)
为以现在的宽度为起点只移动指定的移动。
即使相同移动,若改变现在的宽度
,得到的轨道宽度均不同。
·所谓 微調動作移動
(
微调动作移动
)
为使用游标执行移动。按游标则立即移动,连续按押
时,则连续移动。
· 軌道寬度絕對位置
(
轨道宽度绝对位置
)
的文本框中只能输入数值,无法变更轨道宽度。依
照下列步骤按
START
钮,执行轨道移动。
動作設定
( ) 動作設定 ( )
注意 :
操作篇
4. 自动生产
SI-F130AI
4-15
· 絕對座標移動 ( 绝对坐标移动 )
,
START ,
結束
( ) ,
在轨道移动中按操作面板
STOP
钮时立即停止
,
再度按
START
钮
,
再开始移动至目标位
置。
· 相對座標移動 ( 相对坐标移动 )
START
(+) (-)
轨道移动中按操作盘的
STOP
钮时立即停止
,
再度按
START
钮
,
再开始移动至目标位置。
結束 ( ) ,
·
微調動作移動 ( 微调动作移动 )
高速 ( ) 低速 ( )
SHIFT
結束 ( )
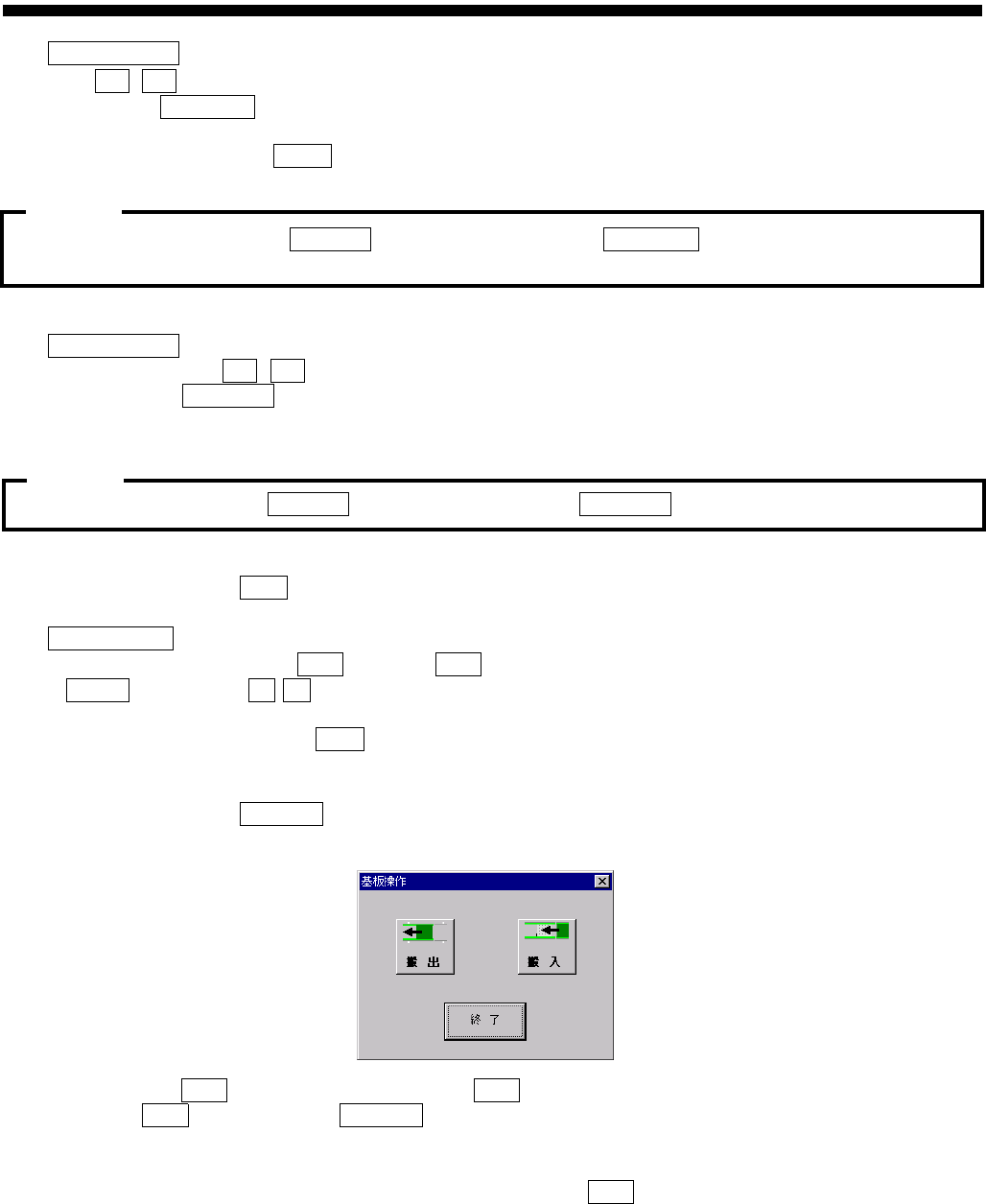
(2) 基板的搬出搬入
基板操作 ( ) ,
搬入 ( ) 搬出 ( )
終了 ( ) 動作設定 ( )
(3) 基板的搬出间隔
設定 ( )
注意 :
注意 :