00195722-0102_UM_X-Serie_SR605_EN.pdf - 第122页
3 Technical data for the machine User Manual SIPLACE X-Series 3.5 Placement head From software version SR.605.xx 07/2008 EN Edition 122 3 Fig. 3.5 - 2 20-segment Collect&Place head - F unction groups, part 2 (1) C&am…
User Manual SIPLACE X-Series 3 Technical data for the machine
From software version SR.605.xx 07/2008 EN Edition 3.5 Placement head
121
3.5 Placement head
3.5.1 20-segment Collect&Place head for very high-speed placement
3
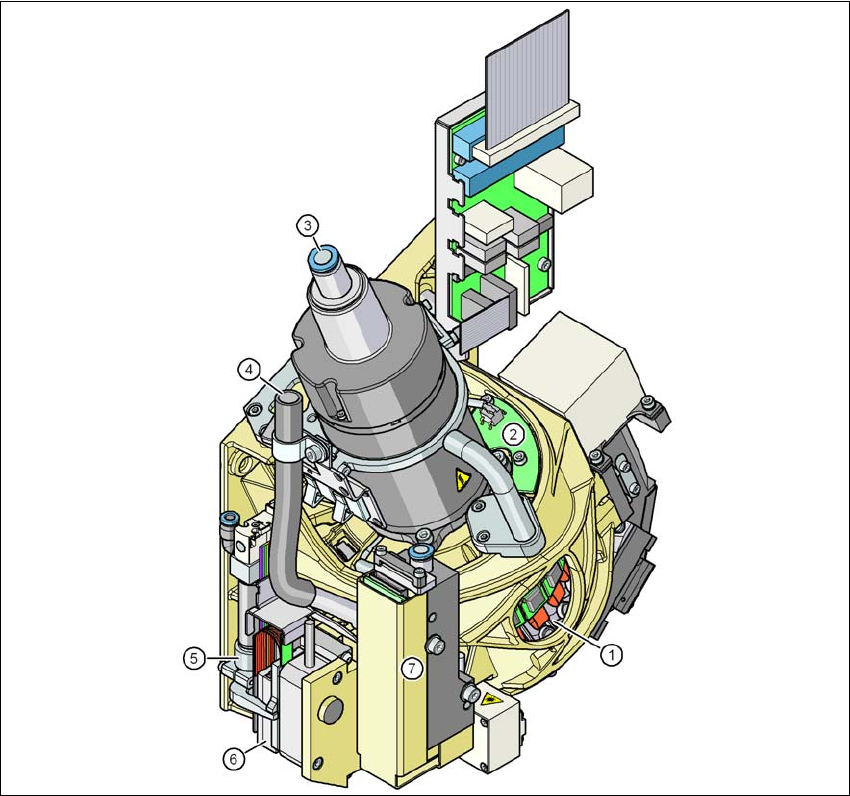
Fig. 3.5 - 1 20-segment Collect&Place head - Function groups, part 1
(1) DP drive, 20 drives
(2) "Vacuum sensor holding circuit" board
(3) Compressed air connection for 20 Venturi nozzles in the pick-up/placement and holding cir-
cuit
(4) Line for the exhaust air from the pressure control valve (7)
(5) Return cylinder
(6) Z motor (linear motor)
(7) Pressure control valve
3 Technical data for the machine User Manual SIPLACE X-Series
3.5 Placement head From software version SR.605.xx 07/2008 EN Edition
122
3
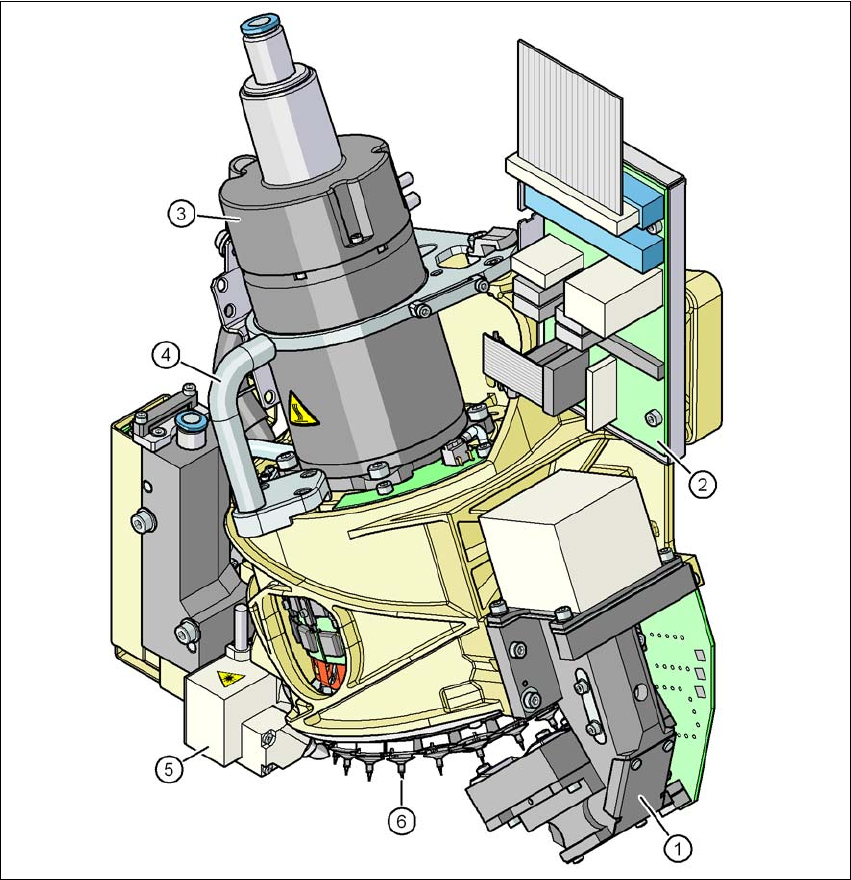
Fig. 3.5 - 2 20-segment Collect&Place head - Function groups, part 2
(1) C&P component camera, type 23, 6 x 6, digital
(2) Intermediate distributor board
(3) Star motor
(4) Handle
(5) Component sensor
(6) Star with 20 nozzles
User Manual SIPLACE X-Series 3 Technical data for the machine
From software version SR.605.xx 07/2008 EN Edition 3.5 Placement head
123
3.5.1.1 Description
The 20-segment Collect&Place head works on the Collect&Place principle. This means that,
within each cycle, twenty components are picked up by the placement head. At the pick-up and
placement position the component sensor checks that the component is present at the nozzle. On
their way to the placement position the components are optically centered and rotated into the re-
quired placement angle. Finally forced air sets down the component gently and accurately on the
board.
The C&P20A head succeeds in considerably increasing the output of the placement head and
thus of the overall placement machine. The compact construction of the C&P20A head allows very
short cycle times. In this case, the star axis is at an angle to the PCB level. This geometry allows
the segments to be arranged in a very small space.
The CO camera is still integrated into the C&P20A head. This saves additional traveling distances
to external centering cameras. Each segment also has a separate DP drive for rotating the nozzle.
The nozzles are therefore no longer rotated into the correct position at a single head station. They
can be rotated into their placement position at any time and independently of one another.
Each segment has a separate vacuum generator. This greatly reduces the time taken to switch
between vacuum and air kiss. It also allows a vacuum check to be carried out in the holding circuit
for each individual nozzle.
The Z drive for the segments is implemented with a linear motor with linear path measuring sys-
tem, and is thus extremely precise. In the pick-up/placement position, the Z drive moves the seg-
ments up or down in the vertical direction.