00196503-02_UM_X-Serie_SR70X_DE.pdf - 第132页
Technische Daten des Automaten Betriebsanleitung SIPLACE X-Serie Bestückkopf Ab Softwareversion SR.70x.xx Ausgabe 01/2011 132 3.5.2.5 Mont agepositionen des MultiS t ar an den Automaten 3.5.2.6 MultiSt ar im Collect&…
Betriebsanleitung SIPLACE X-Serie Technische Daten des Automaten
Ab Softwareversion SR.70x.xx Ausgabe 01/2011 Bestückkopf
131
– Matrix Tray Changer
– TwinStar
3.5.2.3 Klassifizierung des zu verarbeitenden BE-Spektrums
3
3.5.2.4 Bestückmodi des MultiStar
Je nach BE-Klasse arbeitet der CPP-Kopf in unterschiedlichen Bestückmodi. Die Rüstoptimierung
wählt dazu den Bestückmodus mit den minimalen Taktzeiten. Die folgende Tabelle zeigt den Zu-
sammenhang zwischen BE-Klasse und Bestückmodus.
Tab. 3.5 - 2 Relationen zwischen BE-Klasse und Bestückmodi
3
3
BE-Klasse BE-Größe Montageposition
a
des CPP-Kopfes
BE-Höhe BE-Kameratyp
Kleines BE
K_BE
01005
b
-
27 x 27 mm²
oben bis 8,5 mm
Kopfkamera,
Typ 30
unten bis 6 mm
01005
b
-
16 x 16 mm²
unten bis 6 mm
Kopfkamera,
Typ 38
Mittelgroßes BE,
Typ M_BE_1
< 27 x 27 mm²
oben
zwischen 8,5
und 11,5 mm
Stationäre
BE-Kamera,
Typ 33
(siehe Abschnitt
6.7.1
, Seite 406)
unten nicht möglich
Mittelgroßes BE,
Typ M_BE_2
zwischen
27 x 27 mm²
und 32 x 32 mm²
oben 11,5 mm
unten nicht möglich
Großes BE
G_BE
zwischen 32 x
32 mm² und
50 x 40 mm²
oben bis 11,5 mm Stationäre
BE-Kamera,
Typ 33
unten nicht möglich
Tab. 3.5 - 1 Klassifizierung des zu verarbeitenden BE-Spektrums
a) Beachten Sie bitte die Regeln für die Höhe der Montagepositionen in Abschnitt 3.5.2.2, Seite 130.
2
b) 01005-BE: Kameratyp 30; Kameratyp 38 empfohlen für hohe Qualitätsanforderungen
Bestückmodus Bauelementeklasse
Kleines BE Mittelgroßes BE Großes BE
Collect&Place-
Modus
ja nein nein
Gemischter Modus ja ja nein
Erweiterter
Pick&Place-Modus
ja ja ja
Reiner
Pick&Place-Modus
nein nein ja
Technische Daten des Automaten Betriebsanleitung SIPLACE X-Serie
Bestückkopf Ab Softwareversion SR.70x.xx Ausgabe 01/2011
132
3.5.2.5 Montagepositionen des MultiStar an den Automaten
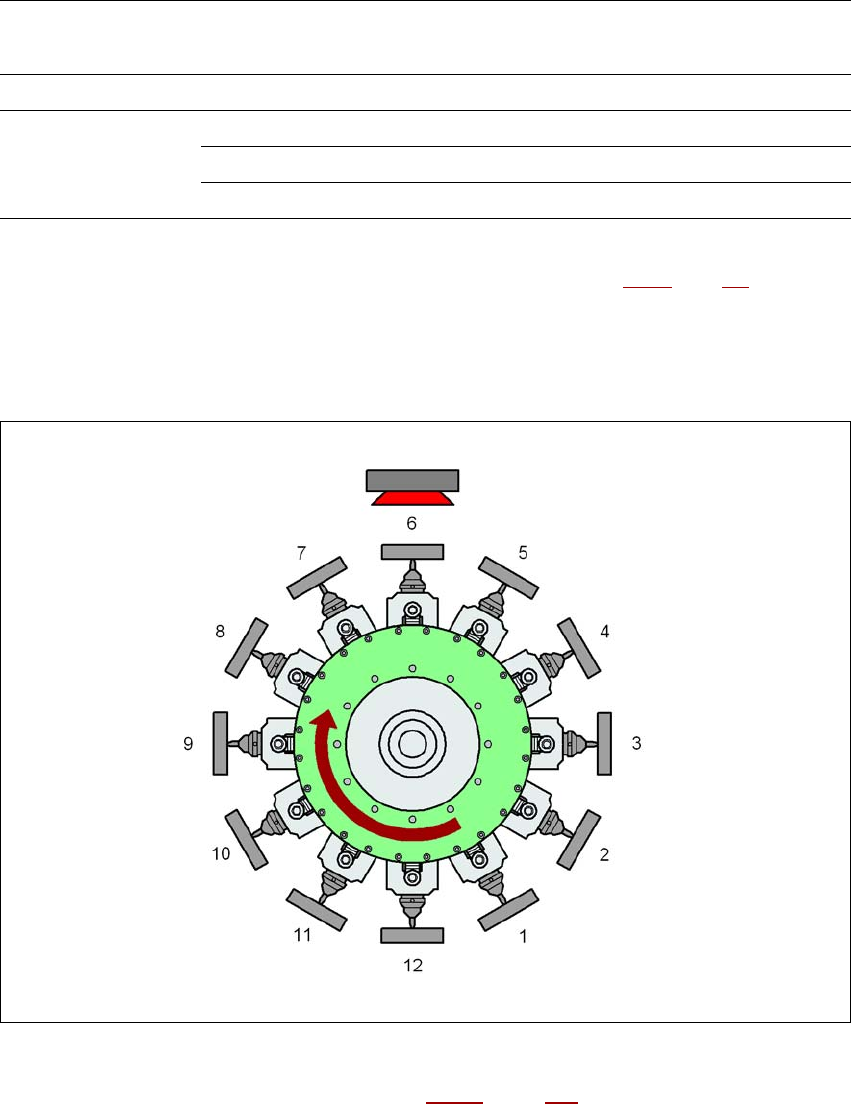
3.5.2.6 MultiStar im Collect&Place-Modus
In diesem Modus verarbeitet der MultiStar kleine Bauelemente.
3
Abb. 3.5 - 6 MultiStar - Collect&Place-Modus
K_BE Kleines Bauelement (siehe Tabelle 3.5 - 1, Seite 131)
Typ 30/38 BE-Kamera, Typ 30oder Typ 38
1 ... 12 Reihenfolge der aufgenommenen Bauelemente
3
Bestückautomat Montageposition
a
CPP-Kopf
Maximale BE-Höhe Visionkamera
SIPLACE X4I nur unten 6 mm Kopfkamera
SIPLACE X4, X3, X2 unten 6 mm Kopfkamera
oben 8,5 mm Kopfkamera
nur oben 11,5 mm Stationäre BE-Kamera
Tab. 3.5 - 3 Montagepositionen des CPP-Kopfes an den Automaten
a) Beachten Sie bitte die Regeln für die Höhe der Montagepositionen in Abschnitt 3.5.2.2, Seite 130.
Typ 30/38
Betriebsanleitung SIPLACE X-Serie Technische Daten des Automaten
Ab Softwareversion SR.70x.xx Ausgabe 01/2011 Bestückkopf
133
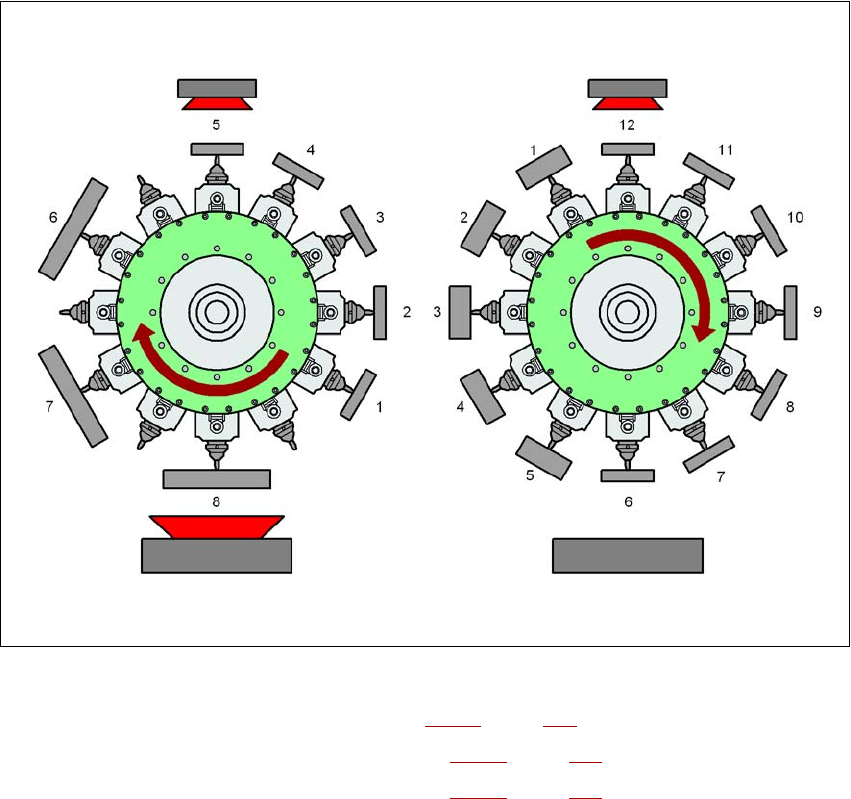
3.5.2.7 MultiStar im gemischten Modus
In diesem Modus werden kleine bis mittelgroße Bauelemente verarbeitet.
3
Abb. 3.5 - 7 MultiStar - gemischter Modus
K_BE Kleines Bauelement, siehe Tabelle 3.5 - 1, Seite 131
M_BE_1 Mittelgroßes BE, Typ 1 (siehe Tabelle 3.5 - 1, Seite 131)
M_BE_2 Mittelgroßes BE, Typ 2 (siehe Tabelle 3.5 - 1
, Seite 131)
Typ 30/38 BE-Kamera, Typ 30 oder Typ 38
Typ 33 Stationäre BE-Kamera, Typ 33
1...8 Reihenfolge der aufgenommenen Bauelemente
1 ... 12 Reihenfolge der aufgenommenen Bauelemente
3
Benachbarte Segmente des CPP-Kopfes können keine Bauelemente des Typs M_BE_2 aufneh-
men, wenn die Diagonale des mittelgroßen BE, Typ 2 (M_BE_2) länger als 39,8 mm ist.
Typ 30/38 Typ 30/38
Typ 33 Typ 33
K_BE
M_BE_2
M_BE_1
K_BE