X service技术参数 - 第10页
10 Placement Hea ds Head Modularity Description SIPLACE X machines are char- acterize d by their exc ellent flexibility in the production process. This flexibility is partly d ue to th e head mod- ular ity . Differen t p…
9
Line Concept
Description
Description
SIPLACE X machines allow a
production line to be individ-
ually configured from a range
of identical and different
modules. As the production
requirements change, the
individual placement
system - which are both mod-
ular and compact - can be
quickly recombined without
great effort.
The SIPLACE X family has ex-
actly the right placement sys-
tem, whatever the output
requirements:
SIPLACE X placement
systems cover the SMD spec-
trum of components from
0201 to 125 x 10 mm² with a
high placement rate.
SIPLACE set-up optimiza-
tion is a tool for increasing
the line's productivity.
The software calculates indi-
vidual set-ups for individual
products, individual set-ups
for different products and
family set-ups for different
products.
The program data can be
exchanged between the indi-
vidual lines - even for
different machine configura-
tions.
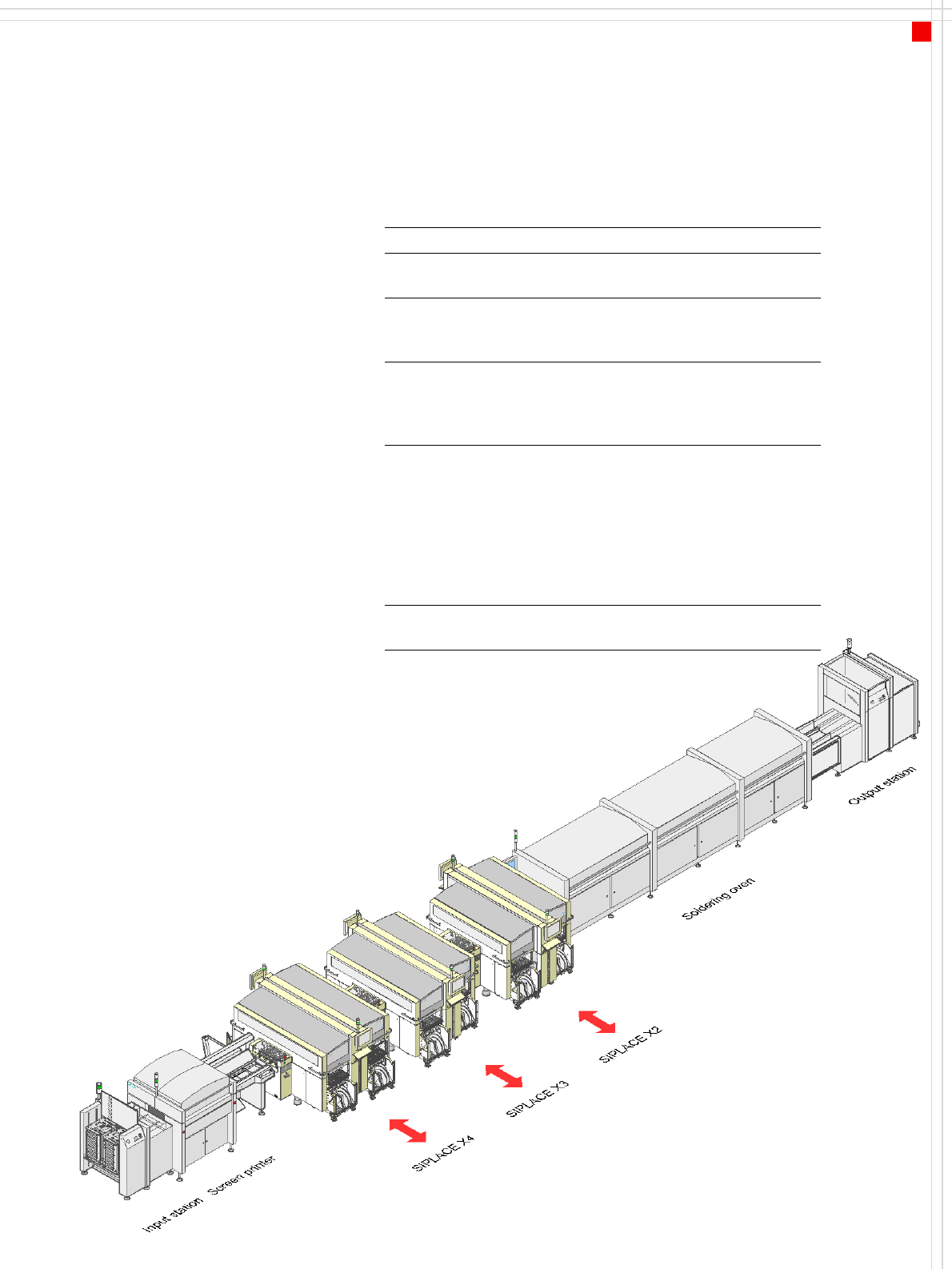
System SIPLACE SMD placement lines
Placement
modules
SIPLACE X2, X3 or X4
Peripheral
modules
Input/output stations, screen printers,
soldering ovens, inspection stations, etc,
available from Siemens L&A
Component
range
0201 to 85 x 85 mm² / 125 x 10 mm² max.
200 x 125 mm² (with restrictions). The
range of components depends on which
head configuration is selected.
PCB conveyor Single and dual conveyor with automatic
width adjustment unit;
Dual conveyor in Single conveyor mode;
"Wide board“ mode, "Long board" option
and combinations thereof for both PCB
conveyors. The maximum PCB width is
determined by the module with the small-
est PCB conveyor width.
Space
required
6.0 m² for the X2 module,
6.7 m² per X3 or X4 module
10
Placement Heads
Head Modularity
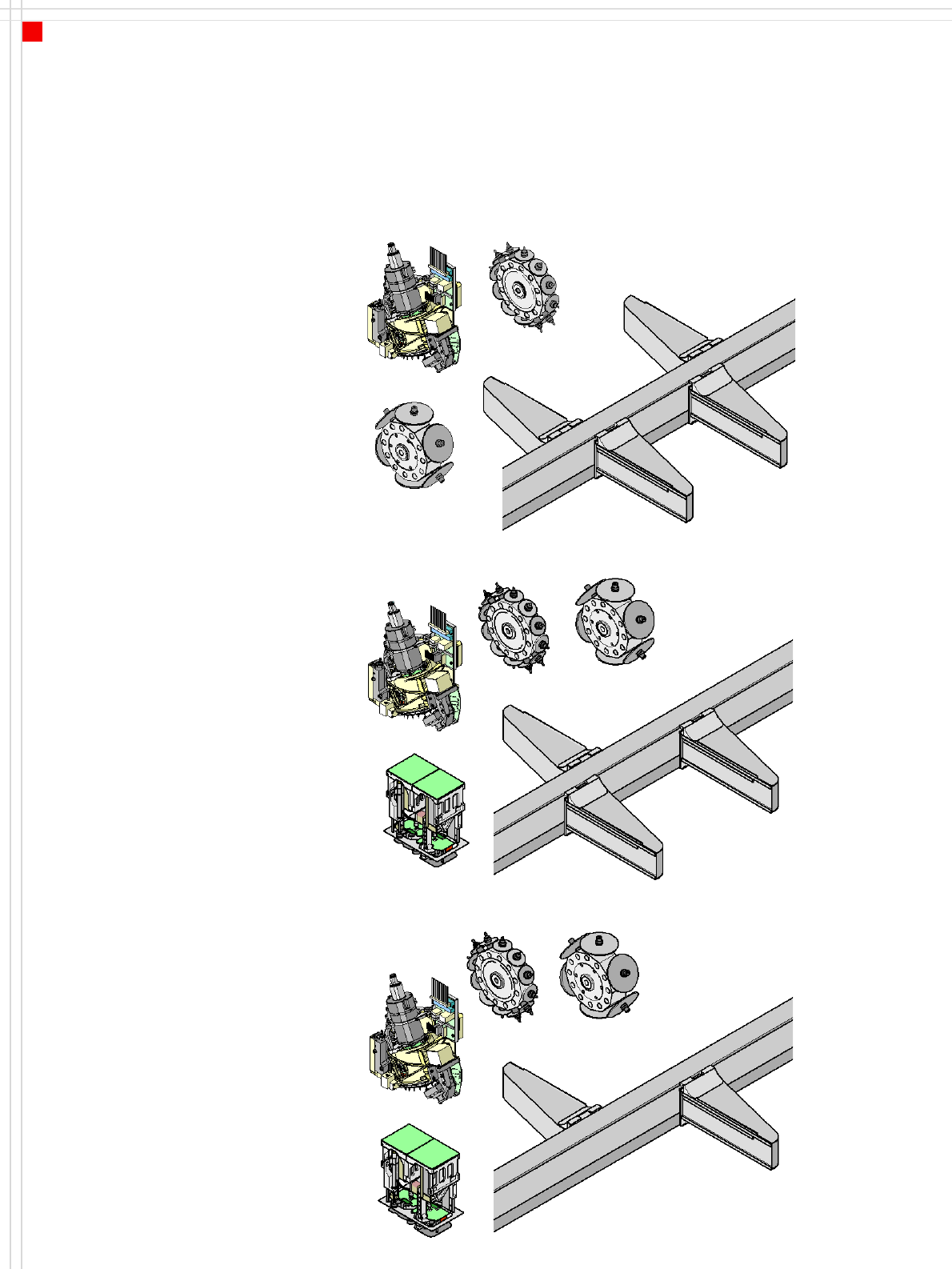
Description
SIPLACE X machines are char-
acterized by their excellent
flexibility in the production
process. This flexibility is
partly due to the head mod-
ularity. Different placement
head variants can be config-
ured to suit the production
requirements. The illustra-
tions show the placement
head variants for the SIPLACE
X2, X3 and X4 machines.
Section "Machine Description
- Technical Data - “ from page
5 contains a list of placement
head configurations and
placement rates.
There is also a reconfigura-
tion kit if you wish to change
the placement head locally.
This package contains the
appropriate nozzle changers,
assembly parts, cables, etc, in
addition to the placement
head.
C&P12
C&P6
Placement area 2
G1
G2
G3
G4
C&P20/C&P12/C&P6
C&P20/C&P12/C&P6
C&P20/C&P12/C&P6
C&P20/C&P12/C&P6
C&P20
Placement area 1
SIPLACE X4
SIPLACE X3
TH
C&P12
Placement area 2
G1
G3
G4
C&P20/C&P12/C&P6/TH
C&P20/C&P12/C&P6
C&P20/C&P12/C&P6
C&P6
Placement area 1
C&P20
SIPLACE X2
TH
C&P12
Placement area 2
G1
G3
C&P20/C&P12/C&P6/TH
C&P20/C&P12/C&P6/TH
C&P6
Placement area 1
C&P20
11
Placement Heads
20-Nozzle Collect&Place Head for
Very High-Speed Placement
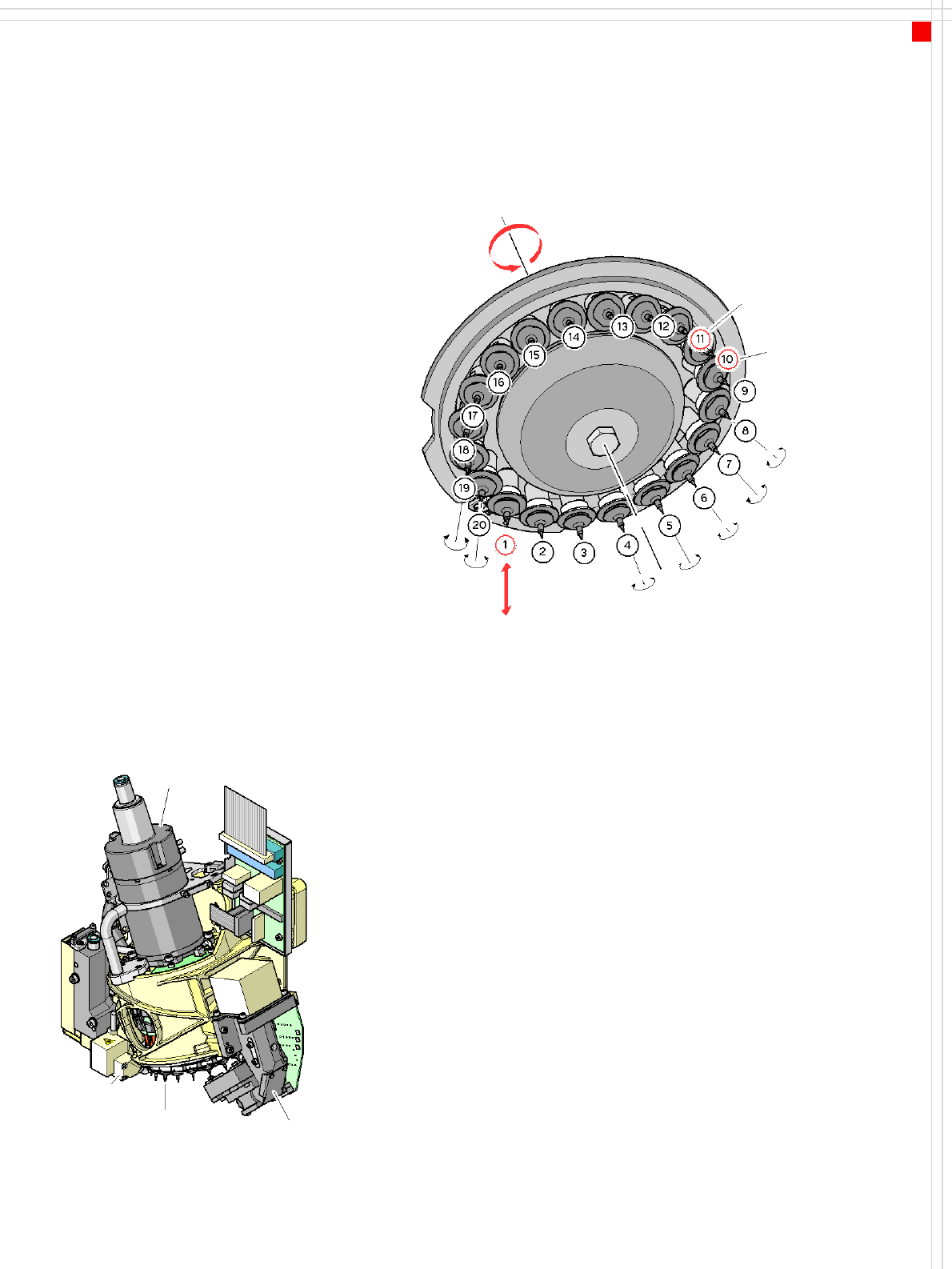
Description
The 20-nozzle Collect & Place
head works on the Collect &
Place principle. This means
that, within each cycle,
twenty components are
picked up by the placement
head, are optically centered
on the way to the board and
are rotated into the required
placement angle. Lastly, the
component is placed gently
and accurately on the board.
The 20-nozzle Collect & Place
head succeeds in consider-
ably increasing the output of
the placement head and
thus of the overall place-
ment machine. The high-res-
olution component camera
allows the 20-nozzle Collect
& Place head to optically cen-
ter and place component
sizes ranging from 0201 to 6
x 6 mm².
Checking and self-learning
functions
The reliability of the Collect &
Place head is increased by
various checking and self-
learning functions.
• A component sensor is in-
stalled on the 20-nozzle
Collect & Place head to in-
crease the placement reli-
ability. It checks for the
presence of a component
at the nozzle at the pick-up
and placement position.
• The digital component
camera on the placement
head determines the pack-
age form and the precise
position of each compo-
nent at the nozzle. Any
deviations from the re-
quired pick-up position are
corrected before place-
ment takes place.
• A sensor registers the rela-
tive movement between
nozzle and segment while
setting down compo-
nents, and sends a signal
to the axis controller to
regulate the position. With
this sensor stop method,
differences in height dur-
ing pick-up and any un-
evenness of the PCB
surface are compensated
during placement.
Star
rotation
Pick up compo-
nent and place it
Turn component
individually
Optically center
component
Check
vacuum
Component
sensor
Component
sensor
Star motor
Star with
20 nozzles
Component
camera