3_AVS_V2_MFU_BA-intern_DE_07-2019 - 第160页
ASM AVS - B EDIENUNGSANLEITUNG S EITE 160 VON 182 In der nac hfolg ende n A nsicht (u nten ) di e e ntsp r. Z eile m ark iere n . Aus wah l der Zei le anhan d Tr ans ports pur (Sp alte 1 ), Kop f – Segmen t ( Spa lte 2) …
ASM AVS - BEDIENUNGSANLEITUNG
SEITE 159 VON 182
7.1.2.5 Plattform 3 ab SW 701.xx
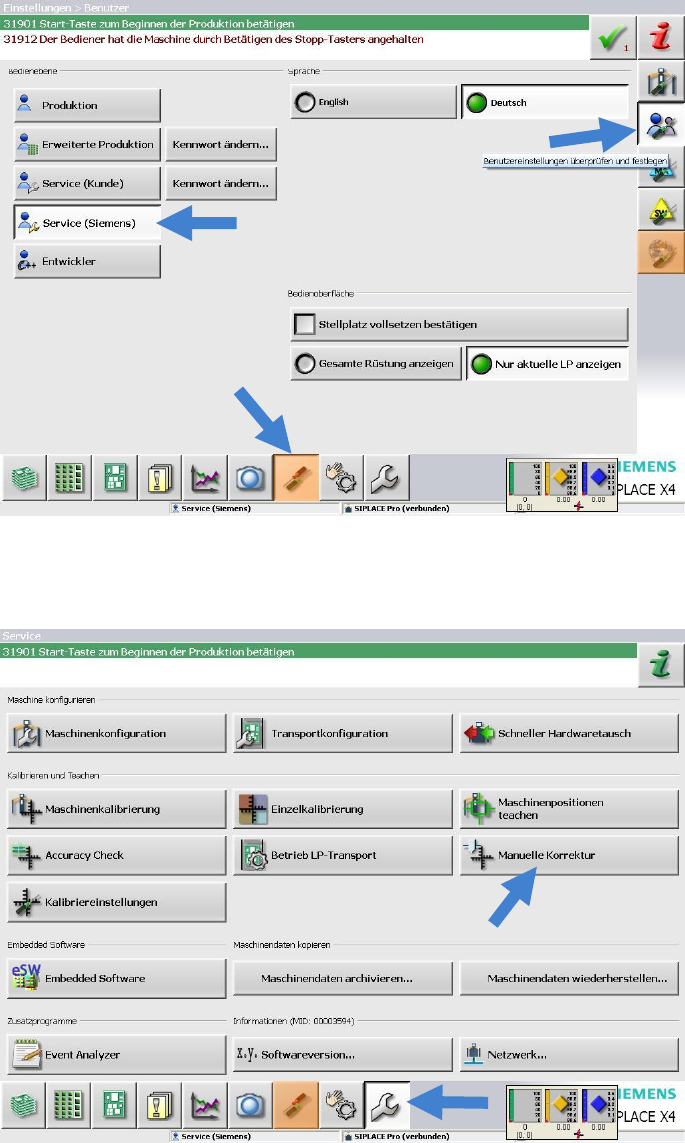
Ab der SW 701 können die Offset Korrekturwerte über die Stations-Software GUI eingetra-
gen werden. Es ist nicht mehr notwendig Dateien auf Windowsebene zu korrigieren.
Wechseln Sie dazu in den »Service Level«.
Wechseln Sie anschließend in die Ansicht »Service«.
Klicken Sie dort auf »Manuelle Korrektur«.
ASM AVS - BEDIENUNGSANLEITUNG
SEITE 160 VON 182
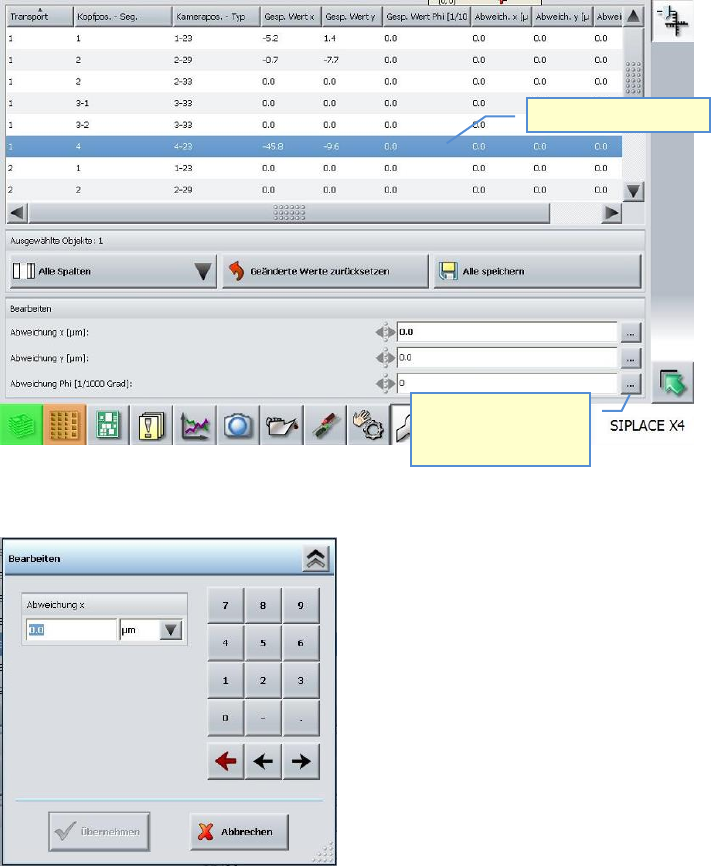
In der nachfolgenden Ansicht (unten) die entspr. Zeile markieren.
Auswahl der Zeile anhand Transportspur (Spalte 1), Kopf – Segment (Spalte 2) und Kamera-
typ (Spalte 3).
Es erscheint ein Eingabefenster in dem Sie den ermittelten Offset mit Vorzeichen eintragen.
Diese Werte erscheinen dann in den Spalten „Abweichung…“
Beim anschließenden »Speichern« werden die Werte dann mit denen der Spalten „Gesp.
Wert…..“ verrechnet.
1. Spalte auswählen.
2. An der Achse die
korrigiert werden
soll, hier klicken
ASM AVS - BEDIENUNGSANLEITUNG
SEITE 161 VON 182
7.1.2.6 Plattform 0 -> SPLACE S15, F3
Bei Maschinen der Generation S15, F3, gibt es 2 Möglichkeiten den Offset zu korrigieren.
Methode 1: In der Datei „Real.ma“ wird der Offset an der Kamera, bzw. an der Nullpunkt-
korrektur der Achse korrigiert. Diese Methode hat den Nachteil, dass der
eingetragene Offset nach einer einfachen Kalibrierung wieder überschrieben
wird.
Bei dieser Methode muss außerdem auf die Reihenfolge der Einträge geachtet werden.
Es muss erst Portal 2 geändert werden. Für dieses Portal, sowie für den RV-Kopf bei F3 Ma-
schinen, muss der LP-Kamera-Offset korrigiert werden.
Dieser Eintrag erfolgt in µm, d.h. der Eintrag kann ohne Umrechnung erfolgen.
Bei Portal 1 (nur S15) wird die Offset-Korrektur an der Nullpunktkorrektur der jeweiligen
Achse, in der Real.ma, eingetragen.
Da dieser Eintrag in DIGIT anstatt in µm erfolgt, muss vorher der gemessene Wert in DIGIT
umgerechnet werden, indem er durch 2,5 geteilt wird.
S15 / F3
Real.ma
Methode 1
SW-Version (alle)
Global
machine type
head
X / Y Portal 2
X / Y Portal 1
Winkel
Real.ma /
Kamera_Offset_
Real.ma \
Achsparameter 1 \
Portal 1 \
Nullpunktkorrektur
Real.ma /
Kamera_Offset_
Winkel
special
Korrektur in Digit !
X0 = Xgem / 2,5
S15
RV12-Kopf
X
new
= X
alt
- X
0
X
neu
= X
alt
- X
0
F3
RV12-Kopf
X
neu
= X
alt
- X
0
IC-Kopf
X
neu
= X
alt
+ X
0
O
neu
= O
alt
- O
0
G2
Kopf 3
X
neu
= X
alt
- X
0
Kopf 1 und 2
Kopf-Offset in Re-
al.ma
X
neu
= X
alt
+ X
0