IPC-7095D-CHINESE NP 2019.pdf - 第108页
IPC-7095D-W AM1 CN 2019 年 1 月 92 对于需要较厚焊料量的带有非塌陷焊球(铜制焊球或 PbSn10 )的 CBGA ,可能需要使用阶梯式模板。阶梯尺 寸通常为 0.04mm 至 0.08mm ,它可以在印制板表面施加两种不同的焊膏厚度。当阶梯尺寸为 0.04mm 时, 金 属刮刀可正常使用。如果使用了阶梯模板,则阶梯线离开任何印刷开孔的距离应该至少 3.75mm 。 因为高铅焊球不会塌陷,所以有充足的焊膏量是…
IPC-7095D-WAM1 CN2019 年 1 月
91
需要一个特殊的刮刀以实现空腔内成功印刷。可以设计具
有 10mm 至 15mm 缝隙的狭缝金属刮刀(见图 7-5),印刷
期间当它进入腔体时裂口区域弯曲成不同的角度。在机器
设置过程中,将机器上刮刀的横向位置调整到空腔的精确
位置是很重要的。
7.1.1.4.1 腔体印刷隔离区
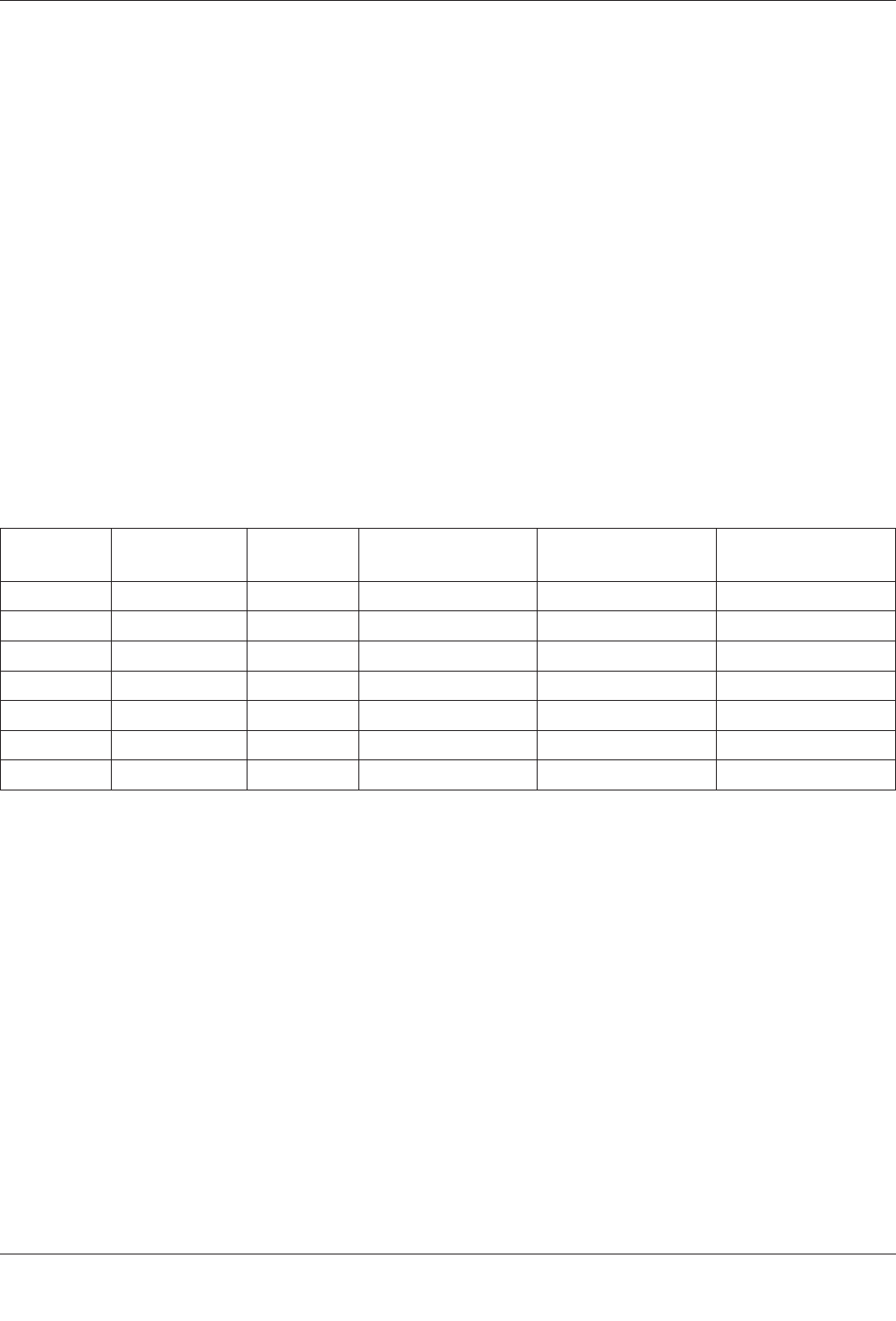
作为设计指导通则,对于一
个简单的 3D 模板(传统的阶梯减薄模板),每 0.025mm[
0.98mil] 的阶梯减薄厚度,从台阶边缘到最近的开孔(图
7-6 中的 Z1)的距离应该是 0.9mm[35.4mil](另见 IPC-
7525)。当需要 3D 腔体印刷模板来进入更深的凹槽时,对
于 Z1 的设计指南是腔体深度加上 1.27mm[50mils],包括制
作的模板侧壁斜率、印制板壁公差和刮刀的调准。
图 7-6 中的 Z2 是开孔和空腔的水平距离。通常这个隔离区
没有 Z1 保守,加上铜箔厚度至少需要 150
μ
m(6mils)。
除了印刷所需的隔离区之外,设计者需要考虑封装轮廓尺
寸以及 BGA 外围焊球与封装边缘之间的距离。设计者还
需要考虑贴装公差、返工和所需的底部填充空间。这可能
会增加腔体所需的隔离区。
7.1.1.3 焊膏量的重要性
对于塑封 BGA,其大部分焊
料是由元件本身的焊球提供的,而焊膏量并不是那么关
键。对于节距超过 0.8mm的塑封 BGA(锡铅或无铅配方),
模板厚度取决于印制板组件中使用的其它类型的元器件。
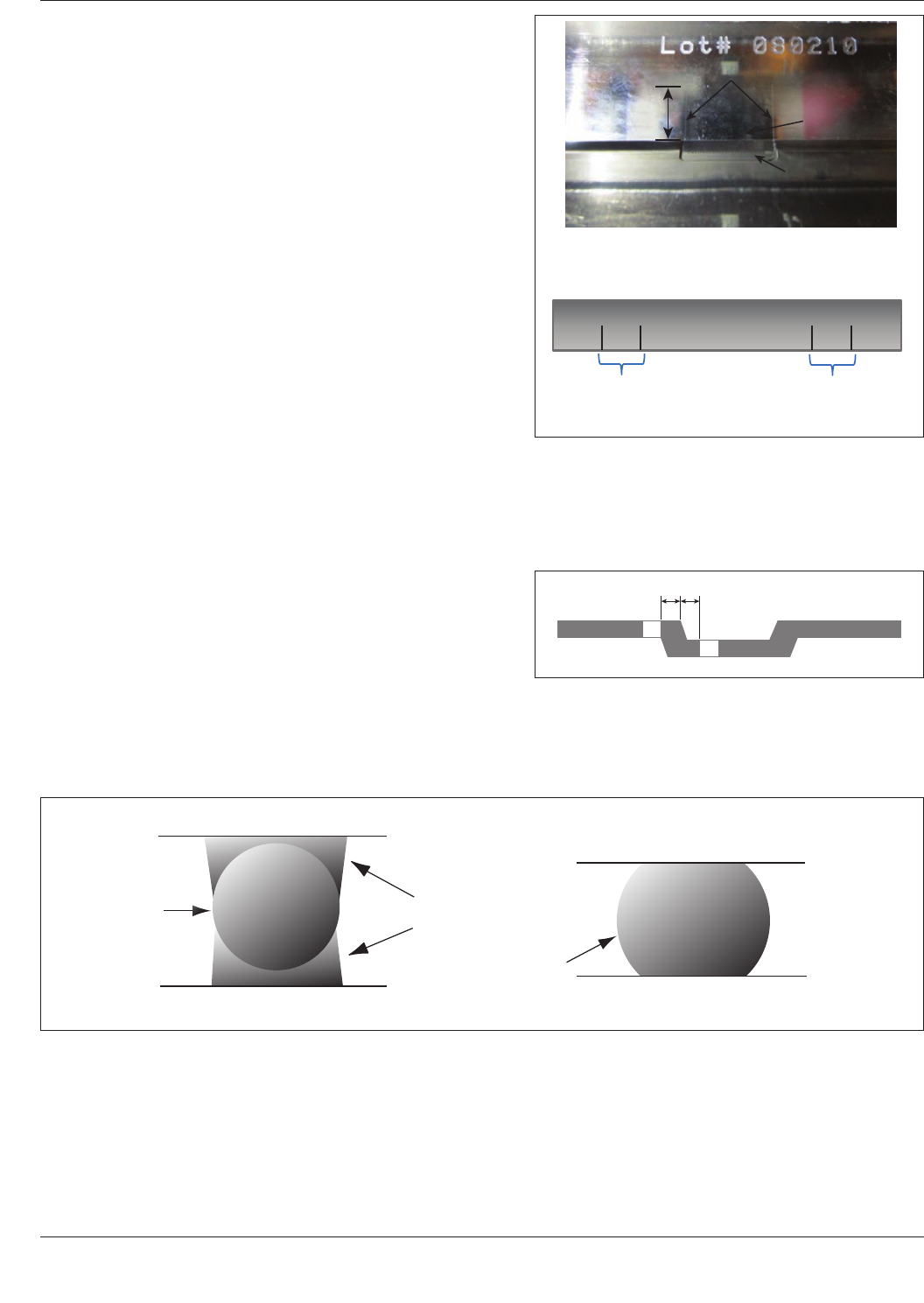
焊料量和模板厚度对于带有非塌陷铜焊球或高温 PbSn10
焊球(熔点为 302°C)的陶瓷 BGA 更为关键。用于陶瓷
BGA 的焊球在通常的再流焊过程中不会塌陷(见图 7-7)。
A
B
C
D
EE
IPC-7095d-7-5-cn
图 7-5 狭缝金属刮刀
A– 裂缝长度 D– 腔体
B– 狭缝 E– 空腔区域
C– 翻门
图 7-6 腔体隔离区
Z2 Z1
IPC-7095d-7-6-cn
图 7-7 高铅和共晶焊球及其焊点比较
A–CBGA 基板
B–PBGA 基板
C– 印制板
D– PbSn10 焊球
E–SnPb 共晶锡铅焊料
F– SnPb36Ag2 焊球
A
D
F
E
B
C
C
IPC-7095d-7-7-cn
IPC-7095D-WAM1 CN 2019 年 1 月
92
对于需要较厚焊料量的带有非塌陷焊球(铜制焊球或 PbSn10)的 CBGA,可能需要使用阶梯式模板。阶梯尺
寸通常为 0.04mm 至 0.08mm,它可以在印制板表面施加两种不同的焊膏厚度。当阶梯尺寸为 0.04mm 时,金
属刮刀可正常使用。如果使用了阶梯模板,则阶梯线离开任何印刷开孔的距离应该至少 3.75mm。
因为高铅焊球不会塌陷,所以有充足的焊膏量是至关重要的。因此除了使用阶梯式模板,模板开孔也应远比连
接盘大以达到非塌陷焊球所需的焊膏量。连接盘和焊球之间的焊料填充取决于焊膏量。CBGA 和 CGA 需要有
一个最低焊膏量以实现可靠焊点。许多供应商拥有此技术能为封装提供特定焊膏量。表 7-6 展示某些陶瓷封装
(使用了锡铅或无铅(SAC)焊膏)焊膏体积要求的范例。
对于锡铅和无铅焊膏,焊膏量要求应该是相同的。另外铜制焊球或高温焊球的焊膏量要求也是相同的,因为这
两种焊球在再流过程中都不发生塌陷且所有焊料填充要求必须通过焊膏来满足。
一些 CBGA 不使用非塌陷焊球而使用在再流焊中会发生塌陷的无铅(SAC)焊球,它对焊点填充形成的贡献
如同锡铅焊球在 PBGA 中一样。
为了使含有非塌陷焊球(铜或 PbSn10)的陶瓷封装获得正确的锡膏量,有必要用开孔放大的模板外扩印刷连
接盘或使用较厚的模板来印刷。对带有 CBGA 的印制板上的其它元器件,需要对开孔尺寸进行调整以抵消由
较厚的模板带来的影响,可能有必要使用阶梯模板。举例来说,对于 1.27mm 节距的 BGA 和 CGA 而言,正确
的焊膏量分别为 78,660,000
μ
m
3
[4,800 mil
3
] 和 114,700,000
μ
m
3
[7,000 mil
3
]。
表 7-6 陶瓷阵列封装焊膏体积要求示例
器件类型
节距(mm)
[mil] 组装合金
最小焊料体积(
μ
m
3
)
[mil
3
]
标称焊料体积(
μ
m
3
)
[mil
3
]
最大焊料体积 (
μ
m
3
)
[mil
3
]
CBGA 1.27 [50] SnPb 78,657,600 [4,800] 90,128,500 [5,500] 163,870,000 [10,000]
CBGA 1.0 [39.37] SnPb 40,967,500 [2,500] 57,354,500 [3,500] 75,380,200 [4,600]
CCGA 1.27 [50] SnPb 49,161,000 [3,000] 81,935,000 [5,000] 124,541,200 [7,600]
CCGA 1.0 [39.37] SnPb 32,774,000 [2,000] 65,548,000 [4,000] 81,935,000 [5,000]
SAC CBGA 1.27 [50] SAC 24,580,500 [1,500] 36,870,750 [2,250] N/A
SAC CBGA 1.0 [39.37] SAC 13,109,600 [800] 28,677,250 [1,750] N/A
Cu CGA 1.0 [39.37] SAC 57,354,500 [3,500] 81,935,000 [5,000] 106,515,000 [6,500]
7.1.2 元器件贴装影响
采用 BGA 技术需要一些新的组装能力。取决于贴片机系统的类型,需要改变封装运
载机构而将封装从矩阵托盘转移至需要贴装的位置。基准点可帮助视觉系统辨识 BGA连接盘图形的确切位置,
这就如同在密节距外围引脚元件中所用的方式一样。取决于器件本体的尺寸,卷带料上大型 BGA 元件需要
44mm 和 56mm 的供料器,而最常见的 BGA 供料器是 JEDEC 托盘。
7.1.3 BGA 贴装视觉系统
贴装精度是 BGA 工艺十分关键的要求。强烈建议在机器贴装之后不要移动
BGA,因为这可能会造成相邻焊点间的桥连,而连接情况不能通过肉眼观察到。贴片机的精度很大程度取决
于视觉系统和吸嘴把持元器件的能力。
视觉系统与实际应用的匹配性也是很重要。视觉系统在贴装之前决定了元器件的 X、Y 坐标和补偿角
θ
。除了
确定元器件的补偿,视觉系统也可以检测元器件的尺寸完整性和焊球缺失。基于电荷耦合器件(CCD)摄像头
的系统采用两种照明方法,分别称为二进制与灰阶。这两种方法对对比度和光亮度的变化都是很敏感的。
灰阶系统使用前置照明,从底部照亮元器件。表面特征会反映至 CCD 摄像头以供处理。二进制系统使用背光
照明,从上方照亮元器件。元器件的轮廓被投影至 CCD 摄像头以供处理。二进制成像是这两种方法中较早的
一种,使用黑白图像的差异来对特征进行定位。灰度值系统通常可以体现出 256 级对比。这两种系统都采用一
种算法来确定元器件的中心。相对于灰阶成像,二进制成像对于计算能力的要求较低。
IPC-7095D-WAM1 CN2019 年 1 月
93
灰阶成像基于焊球位置进行 BGA 元器件贴装,而二进制成像则根据元器件轮廓进行 BGA 元器件贴装。在某
些情况下,BGA 外形和焊球之间的公差很大。因为可以减少由元器件外形变化而导致的贴装误差,灰阶成像
更适合于贴装 BGA 元器件。
选择贴装设备的吸嘴是很重要的,这需要有足够表面积能把持元件同时避免在贴装过程中的偏移。吸嘴必须要
紧贴元件,不允许有真空泄漏,接触感应装置是需要的,它有助于控制 Z 轴方向(垂直)的主轴行程,因为
它可防止元器件在真空吸嘴和基板之间受到挤压。
7.1.3.1 贴片机处理非标准阵列 BGA 元器件的能力
本章节描述了焊球布于非标准栅格的面阵列元器件贴装
工艺,也称作焊球随布设计(见 6.2.6)。面阵列元器件的贴装是在 SMT 生产线上采用贴片机器同其它元器件
一起完成的。
为使得贴片机能贴装偏离栅格的面阵列元器件,尤其是 BGA,需要进行离线教学和在线生产(见 7.1.3.1.1 和
7.1.3.1.2)。
7.1.3.1.1 离线教学
在一个元件供给机器贴装前,需创建元件描述。教学使用的摄像头和在线生产的一样。
元件描述通过一个高分辨率摄像头来教授。描述提供了以下细节:
• 精确的长度、宽度和各焊球间的节距
• 每个焊球尺寸
• 每个焊球的精确位置和元件的外形,包括引脚 1 的标记
另一个方法是通过输入每个焊球实际 X-Y 位置创建元件描述,将以上设置提供给摄像头以检验所有各自位置
的焊球。
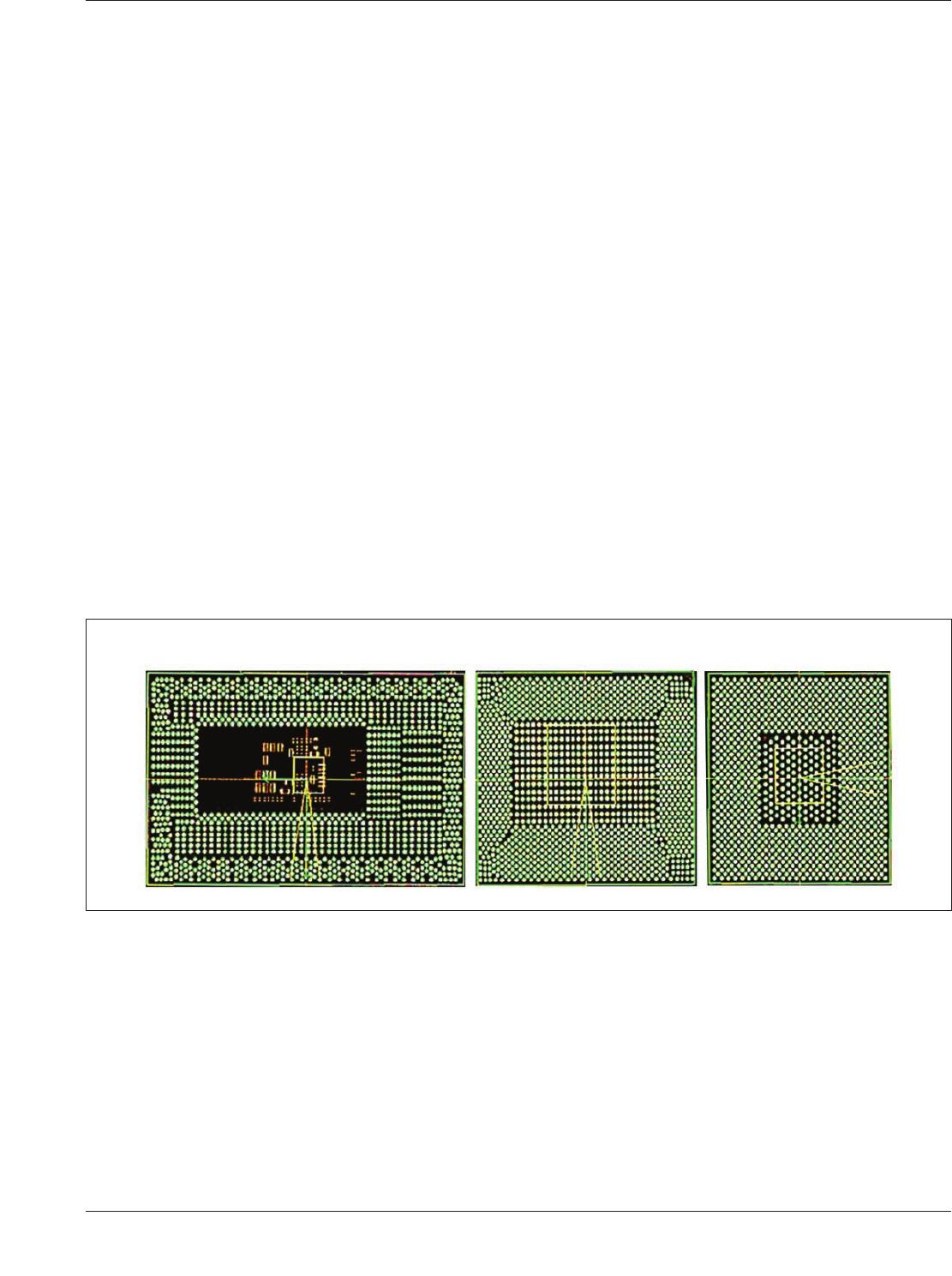
图 7-8 显示了三种不同的焊球随布阵列设计以及在离线教学站如何教授元件描述。
图 7-8 用于离线教学的焊球随布图像捕获
A– 元器件 A
B– 元器件 B
C– 元器件 C
ABC
IPC-7095d-7-8-cn
7.1.3.1.2 在线生产
在生产中,贴片头上的吸嘴将吸取元件并使用摄像头重叠元件描述中提供的细节和图像。
如果图像与元件描述没有任何形式的匹配(如焊球缺失、焊球破碎或两个焊球之间的不规则节距),摄像头将
显示视觉错误并指出位置。这种视觉错误可以借助视觉辅助查看和确认。如果没有错误,设备将把元件移至板
上的 X-Y 位置,并放置在所提供的位置。
通常在每次生产贴装第一片印制板时,操作人员会监控所有 BGA 元器件以及其它大型元器件(如,屏蔽框和
插座)。在贴片头将元件放置到位之前,下视摄像头会提供元件将要放置到板上的位置图像。这个图像将与元