IPC-7095D-CHINESE NP 2019.pdf - 第60页
IPC-7095D-W AM1 CN 2019 年 1 月 44 4.8.2 焊球空洞 空洞可能在焊球连接工艺之前就出 现在焊料球体中 (由于焊球的制造工艺) ,在焊球连 接工艺中引发 (由助焊剂的使用造成) ,并在印制板 组装前出现 。如图 4-38 所示 ,这样的空洞可能会也 可能不会在板级组装过程中消散。 附录 A 提供了工艺控制特性的一些建议,以降低组装 前的空洞发生。 对于组装后焊球空洞的工艺控制标准,参见 7.5.1 。 4…
IPC-7095D-WAM1 CN2019 年 1 月
43
对于需要有稳定电源或接地层的应用,需要的基板层数至少为四层。与双层封装相比,四层基板有较低的热阻
抗和较高的功率耗散。对散热加强型 BGA,内部装有铜制散热片,散热片通常可作为接地层,通过通孔到散
热片连接接地线,散热片变成有源载流接地层。
4.7.2 信号完整性
有三种会影响信号完整性的主要 BGA 封装设计考量:
1) 传输线中特性阻抗的不连续导致反射。
2) 由动态线和静态线之间的耦合噪声产生的相邻线路之间的串扰。
3) 由多路输出同时开关而产生的开关噪声,通常被称为 ΔI 噪声或同步开关输出(SSO)噪声。多路 SSOs 需
要电源和电源线间有一个较低的等效电感(Leff):
BGA 的有效电感取决于与芯片上电源和接地焊盘相关的电源和接地引脚的数量和布置方式,通过对电源和接
地引脚适当分配和借助于商用信号完整性分析工具,Leff 和 ΔI 可以最小化。
4.7.3 封装内置散热片
当芯片功率超过封装基板所支持的最大功耗消散能力时,封装内部可整合安装散热
片。由于大多数层压板材料的热导率较低,集成电路产生通过铜导体、镀覆通孔和焊球散热。通过在芯片安装
区域下面配置一个铜平面或铜区域,散热片就整合到封装中了。
封装设计时很重要的是要尽可能维持热平衡以避免温度变化期间过度翘曲。对于 CBGA,它的散热可通过高导
热性 CuW 材料(其 CTE 与氧化铝基板材料匹配)替代低导热的铝基陶瓷材料来实现。
4.8 封装的接收标准和运输方式
关于 BGA 封装接收标准存在一些问题。这些包括鉴定或制造过程中采用的
工艺控制策略,鉴定时常用抽样计划来定义产品的不合格水平。主要问题有:
• 焊球缺失
• 焊球中空洞
• 焊球连接完整性
• 封装与焊球共面性
• 湿敏性
• 运输介质
• 焊球合金(含铅和无铅)
• 焊球尺寸与形状
• 模块平面度 / 封装弓曲
• 污染物的存在
• 分层(C 模式扫描声学显微镜)
4.8.1 焊球缺失
当 BGA 进料时,焊球触点的缺失或
损坏是不可接受的。图 4-37 提供了 BGA 封装中的焊球
缺失的示例。
注:
对于焊球缺失,请核对器件设计规范,以确保缺失
的互连不是空缺方案的一部分。出于电气优化、布线增
强和机械稳健性改善等目的,先进的器件设计可能在选
定的区域内有内置阵列空缺。
图 4-37 BGA 焊球缺失的示例
IPC-7095D-WAM1 CN 2019 年 1 月
44
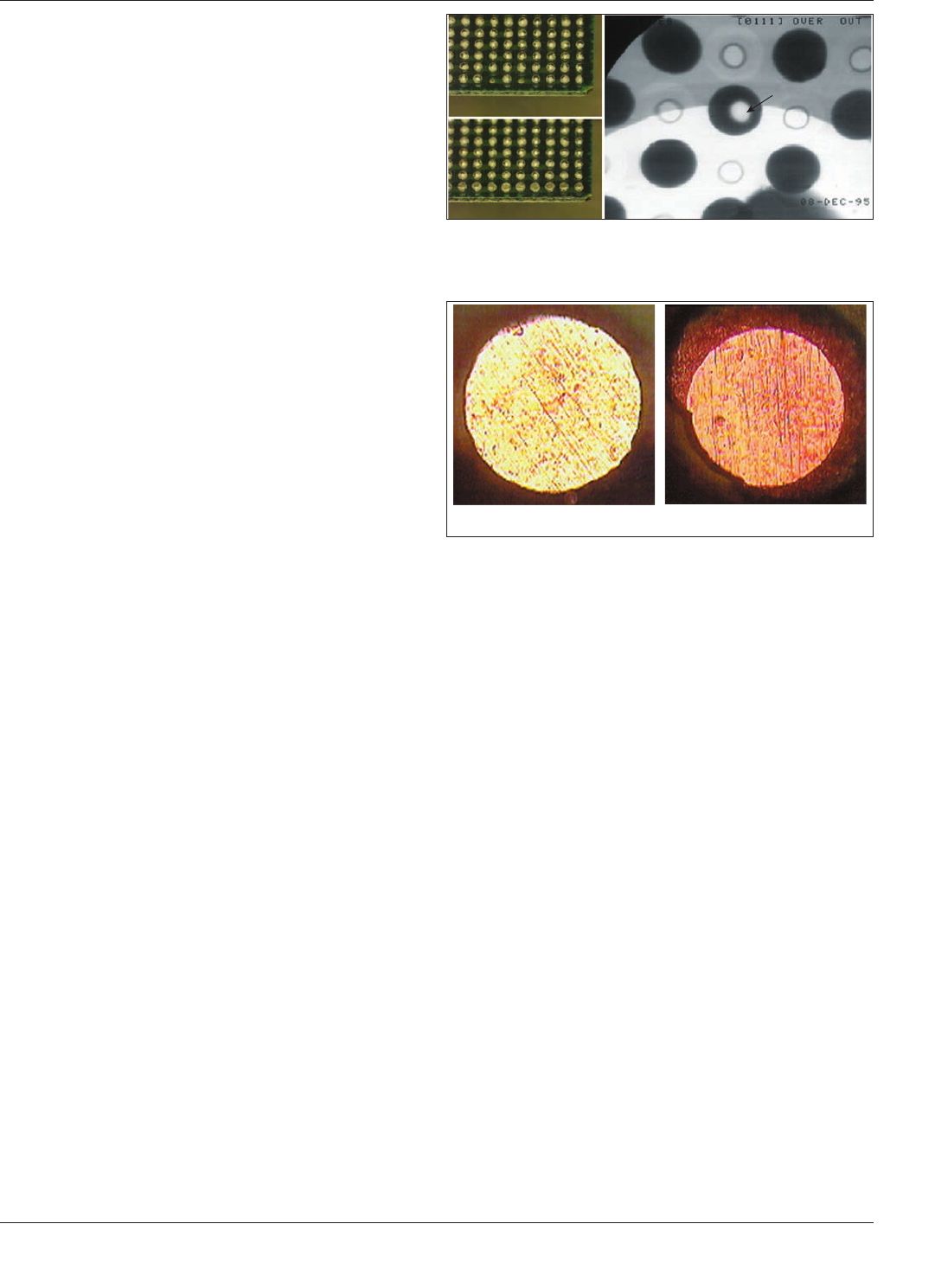
4.8.2 焊球空洞
空洞可能在焊球连接工艺之前就出
现在焊料球体中(由于焊球的制造工艺),在焊球连
接工艺中引发(由助焊剂的使用造成),并在印制板
组装前出现。如图 4-38 所示,这样的空洞可能会也
可能不会在板级组装过程中消散。
附录 A 提供了工艺控制特性的一些建议,以降低组装
前的空洞发生。
对于组装后焊球空洞的工艺控制标准,参见 7.5.1。
4.8.3 焊球连接完整性
可靠的焊球连接是 BGA 封
装成功依赖的因素之一。焊球需要在可接受尺寸公差
内连接,连接后它们的高度和宽度需在规定和 / 或可
接受限值内。最重要的是,它们需要与基板上的连接
盘之间形成适当的金相结合。所有焊球需要能经受确
保润湿而达到最佳连接的温度曲线。如果焊点不润
湿,焊球将无法获得适当的连接也不能保证必需的机
械和电气互连。这样的焊球会在运输和操作时会脱
落,或者在电气测试时会出现失效或间歇性失效。
图 4-39 显示了焊球和连接盘表面。左图为焊球的平
整底部,右图为焊球连接后的 FBGA 焊盘。
如果连接工艺温度不足以形成适当的金相结合,此时
由于焊球和焊盘之间仅靠机械粘合维系,所以只需要
很小的力就可以将焊球从焊盘剥离。
焊球连接完整性可通过焊球剪切或焊球拉动来评估。可获得剪切和拉动的人工和自动剪装置。不建议手动方式
扭曲,剥离和撬动焊点,因为其产生的结果再现性不够,且失效模式不一致。对于剪切和拉动测试,脱离力(通
过剪切或拉动)和失效模式都是重要的参数。焊接界面的失效,表现为焊点从 BGA 树脂基材或印制板连接盘
处撕开,是湿润良好的积极信号。对于良好的连接,不应该有任何未被湿润的区域。焊球拉动和剪切测试方法,
分别参考 JESD22-B115 和 JESD22-B117。
4.8.4 封装和焊球共面性
封装共面性是下列因素共同作用的结果:
• 封装厚度、节距和散热要求
• 基板设计、材料和制造工艺
• 器件(芯片)数量、尺寸和厚度
• 无源元件数量、尺寸和厚度
• 组装材料和制造工艺
一般室温下规定的共面性不总能保证该元器件在 SMT 加工时形成良好的焊点。无论室温共面性怎样,再流焊
接过程中的封装行为(动态翘曲)决定了与焊料接触的好坏。封装的动态翘曲取决于封装 CTE(封装尺寸、
芯片尺寸、封装材料)。如 JESD-B112 所描述,动态翘曲的标志可通过诸如阴影叠纹技术,三维数字图像相关、
条纹投影和各种形式的线扫描或高分辨率聚焦技术等方法来表征。
A
图 4-38 进料检验时共晶焊球中的空洞示例
A – 空洞
AB
图 4-39 焊球和连接盘表面状况示例
A – 焊球平整的底部
B – 焊球连接后 FBGA 上的焊盘
IPC-7095D-WAM1 CN2019 年 1 月
45
封装最终共面性是本节开头提及的因素非常复
杂的组合结果。之前提到的因素 1 和因素 2 对
于封装共面性的影响占很大百分比(达 70%)。
焊球的使用类型决定了封装成品组装到印制板
期间,封装总体共面性的可接受程度。塌陷式
共晶焊料和锡合金基焊球是最普遍的,因为它
们可以弥补较大的封装不共面的问题。
JEDEC 设计指南以其最大直径来定义焊球触点
直径(b),如用平行于底座面即基准面 C 的平
面量测(见图 4-40)。 图 4-40 所示的细节定义了控制共面性(ccc)的轮廓公差带以及封装顶表面(bbb)和底
座面(基准面 C)之间的平行度限值。
封装的高度是从封装上表面到封装底座面(这里是焊球与主印制板安装接触面)量测到的距离。封装的上表面
保持与底座面平行是重要的,因为它要适应测试、检验和组装时对元器件的操作。平行度的双边公差带(bbb)
参考封装表面相对于基准 C(底座面)的平行度。
4.8.4.1 密节距 BGA(FBGA)共面性示例
随着焊球直径增加,共面性公差极限变化很小。表 4-12 显示的
是按焊球尺寸的可控共面性(ccc)。关于具体的共面性公差,咨询 BGA 制造商。
表 4-12 按照焊球尺寸的受控共面性
焊球 (mm) 受控共面性 (mm)
0.3 0.08
0.4 0.1
0.5 0.12
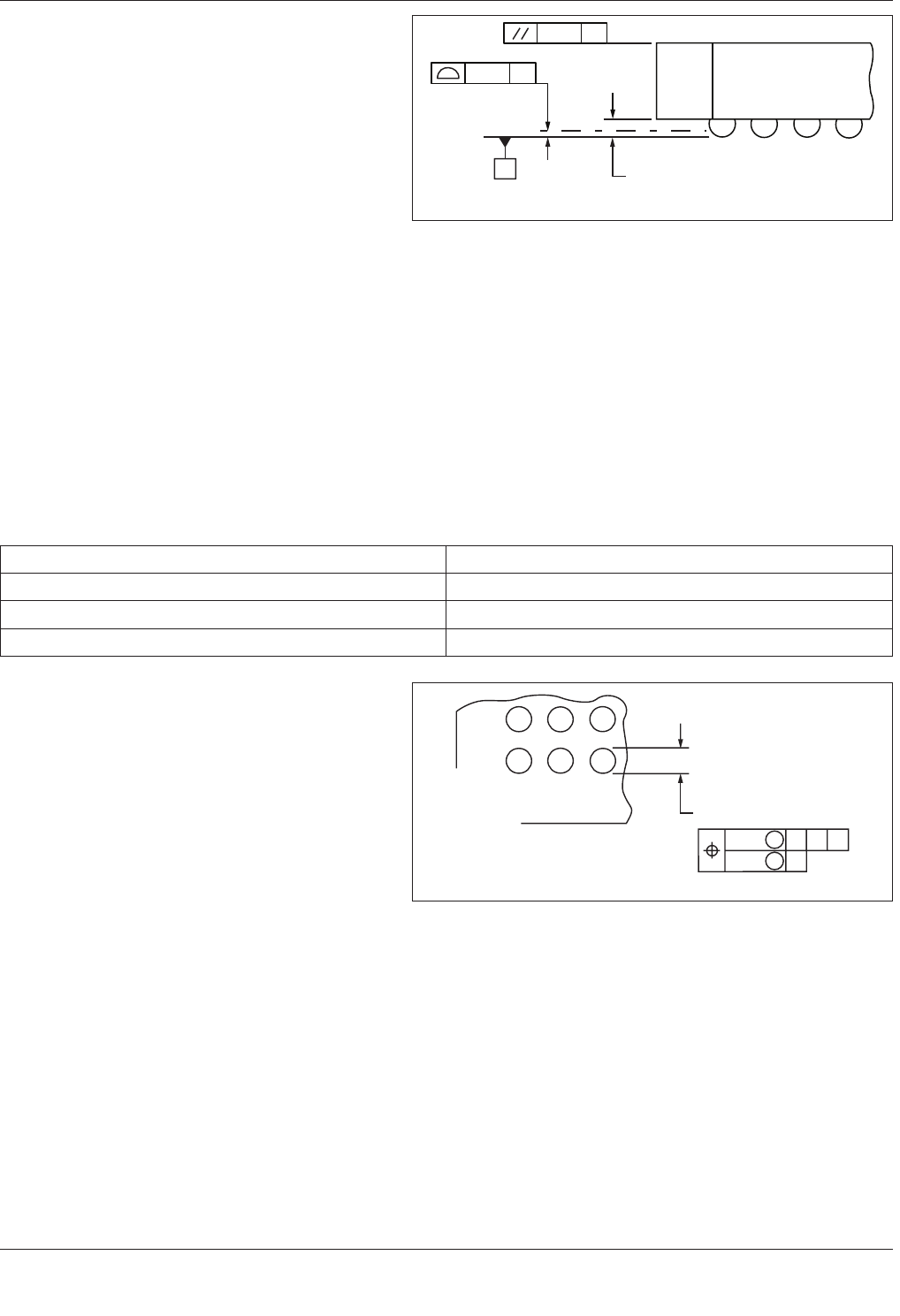
单向轮廓公差带(ccc)由底座面向上延伸,焊
球触点的最低点必须要在公差带内。每个焊球
都有一个与其直径“b”相关的公差带,它通过
基准面 A和基准面 B准确定位并与基准C垂直。
每个焊球中心必须位于公差带内。焊球触点的
位置公差通过关于封装轮廓基准 A、基准 B 和
基准 C 来定义,如图 4-41 所示。
与焊球直径(b),基本节距的间距(e)相关的
公差带阵列控制了焊球的位置。设计指南允许
阵列关于公差带“ddd”上下浮动;然而,焊球
中心必须同时位于两个公差带内。关于 BGA 测量的更多细节,参见 JEP95,章节 4.17。
4.8.5 湿度敏感性(烘烤、贮存、操作、再烘烤)
J-STD-020 和 J-STD-033 规定了湿度敏感要求。J-STD-033
也提供了关于湿度敏感元器件操作的信息。
元器件湿敏性可分成如表 4-13 所示的八种级别。这些分级定义了元器件从密封包装袋取出后在生产车间可以
存放的时间。在环境空气中暴露超过规定时间的元器件,使用之前必须再烘干,以排出过多已吸收的湿气。
许多 BGA 为湿度敏感器件;尤其是 TBGA 和倒装芯片 PBGA。CBGA/CGA 通常对湿气不敏感。J-STD-020 限
制了封装允许吸收湿气的时间,但建议 BGA 至少满足等级 3 的规范。站在制造操作的角度,特别不希望湿敏
等级 5 和等级 6 的器件,因为它们会导致对车间和元器件操作的额外管控。
nX
ccc
C
bbb
C
C
A1
IPC-7095d-4-40-cn
图 4-40 建立 BGA 共面性要求
A B
C
C
ddd
eee
M
M
b nX
IPC-7095d-4-41-cn
图 4-41 焊球触点位置公差