DECAN_S2_维修手册(V4.1) - 第144页
1-122 Advanced Chip Shooter DECAN S 2 Troubleshooting Guide $a211 以前的 Vision 命令没有结束。 [EME R LEVEL] [ 原因 ] 由于 H/W 或 S/W 的异常状 况, Flying Camera 识别部品时发生错误。 [ 措施 方法 ] 执行 $a210 的措施方法。 $a212 Flying Camera 的识别 TimeOut Error …
1-121
MMI
错误码(
Error Code
)和问题解决
$a210 Flying Camera的识别动作没有结束。[EMER LEVEL]
[原因]
由于H/W或S/W的异常状况,Flying Camera识别部品时发生错误。
[措施 方法]
检查Flying Camera ,Cable, Vision Board 状态。为检查状态请与本公司指定的C/S
公司(STS) 或当地代理店(Local Agent)联系。
执行Camera Calibration。详细事项请参照 Administrator’s Guide的 “11.3.7 Head
& Camera Calibration” 部分。
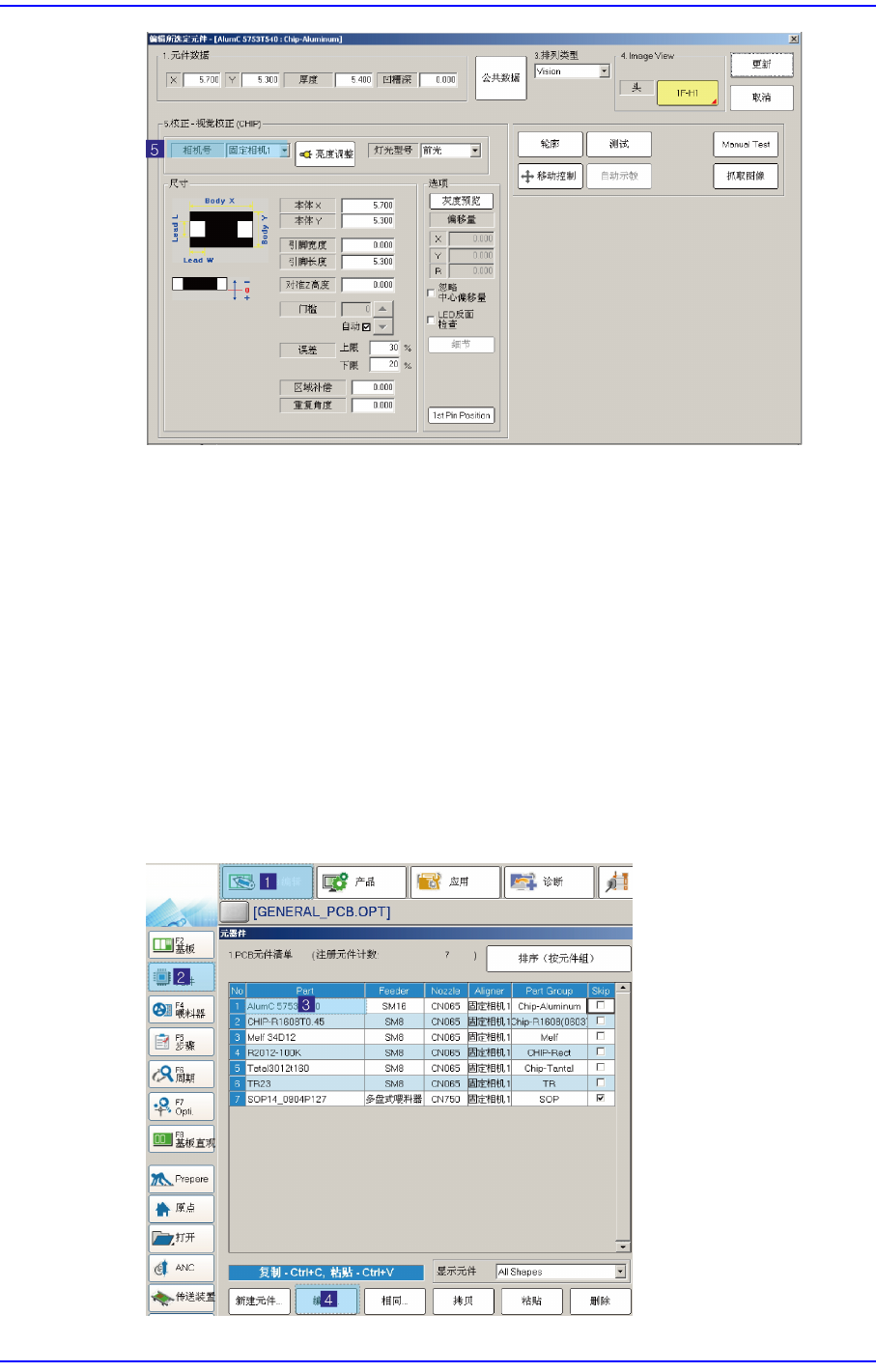
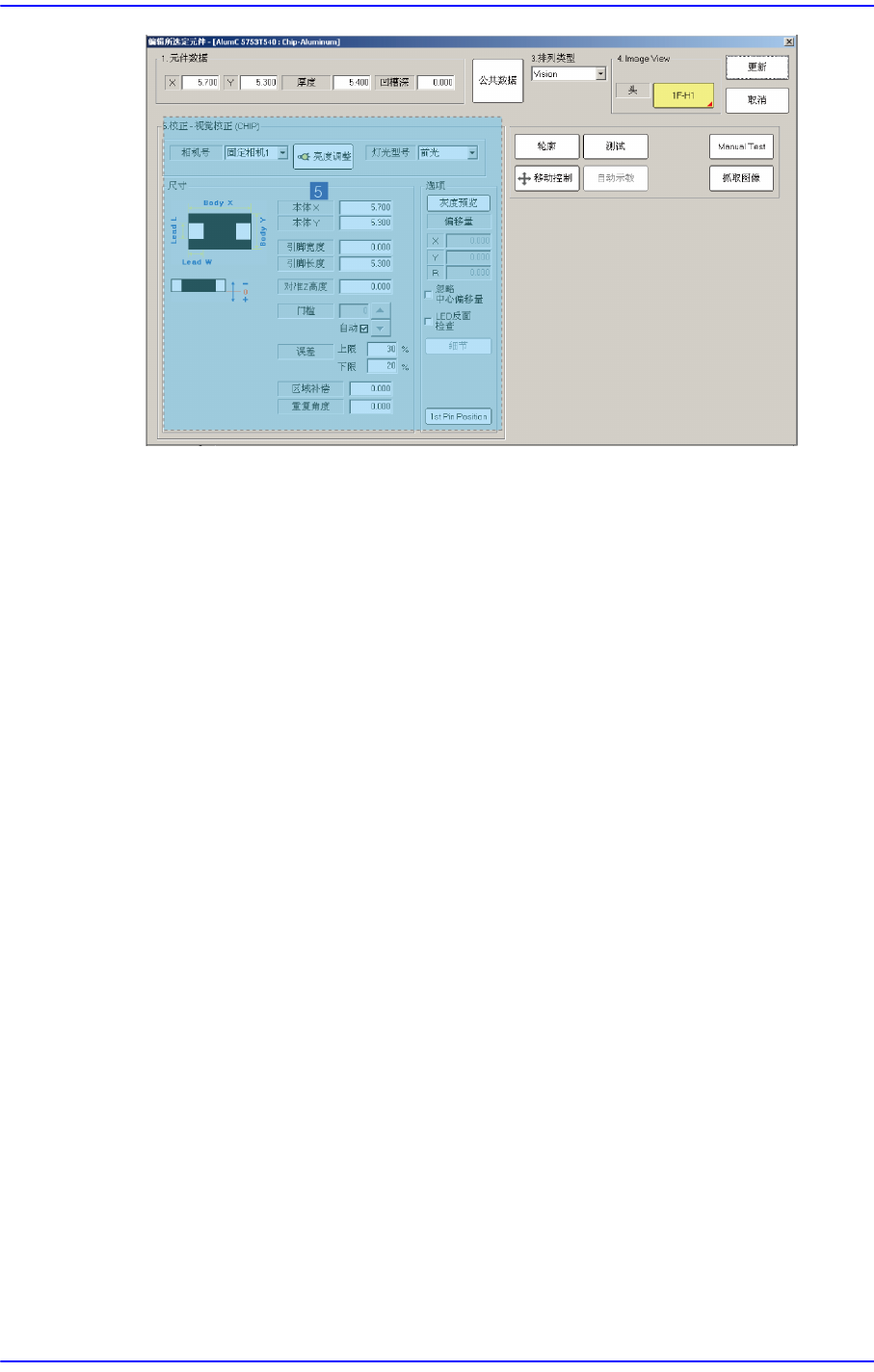
为确认部件数据是否正常,请在 PCB Edit 菜单 “Part”中的错误发生部件的
Profile确认 <Align Data> 领域的信息是否准确设定。
1-122
Advanced Chip Shooter DECAN S2 Troubleshooting Guide
$a211 以前的Vision 命令没有结束。[EMER LEVEL]
[原因 ]
由于H/W或S/W的异常状况,Flying Camera识别部品时发生错误。
[措施 方法 ]
执行$a210的措施方法。
$a212 Flying Camera的识别TimeOut Error。
[原因 ]
Flying Camera识别部品的时间超过24.000 Sec的情况。
[措施 方法 ]
执行$a210的措施方法。
$a213 Flying Camera的识别TimeOut Error。
[原因 ]
由于H/W或S/W的异常状况,Flying Camera识别部品时发生错误。
[措施 方法 ]
执行$a210的措施方法。

1-123
MMI
错误码(
Error Code
)和问题解决
$a220 Upward Camera的识别动作没有结束。
[原因]
由于H/W或S/W的异常状况,Flying Camera识别部品时发生错误。
[措施 方法]
正常关闭设备电源过 5秒后再连接电源重新启动。
$a221 Upward Camera进行识别时发生错误。
[原因]
由于H/W或S/W的异常状况,Flying Camera识别部品时发生错误。
[措施 方法]
确认部件数据是否正常。
确认照明是否适当。
确认Camera的 LED状态。
确认 Camera Cable状态。
$a300 以前的Vision命令没有结束。
[原因]
由于H/W或S/W的异常状况,Vision 命令没有结束的状态下进行其它的Vision 命
令的情况。
[措施 方法]
正常关闭设备电源过 5秒后再连接电源重新启动。
$a401 错误的摄像头ID。
[原因]
由于H/W或S/W的异常状况,受到错误的摄像头ID的情况。
[措施 方法
]
正常关闭设备电源过 5秒后再连接电源重新启动。
$a402 进行Vision 处理时,发生内部错误。
[原因]
由于H/W或S/W的异常状况,执行Vision 内部函数时发生错误的情况。
[措施 方法]
正常关闭设备电源过 5秒后再连接电源重新启动。