德律-AOI-TR-7100程式撰写流程(炉後) - 第52页
將 滑鼠指標點到 Lead_Align 定位框 ,再點選單顆元件編輯區內的 Auto , 系統會告知是否做自 動定位,點選確定後,此時此顆 IC 同一種類所有的 Lead 、 Lead_V oid 檢測框,會依據這個 Lead_Align 定位框內 X,Y 方向的灰階變化,完成自動定位( Relocate )和轉換( T rain )的動 作,並顯示搜尋到( Search )幾個而完成了( get )幾個 Lead_Align 定位框,…
Train(影像攫取、轉換)
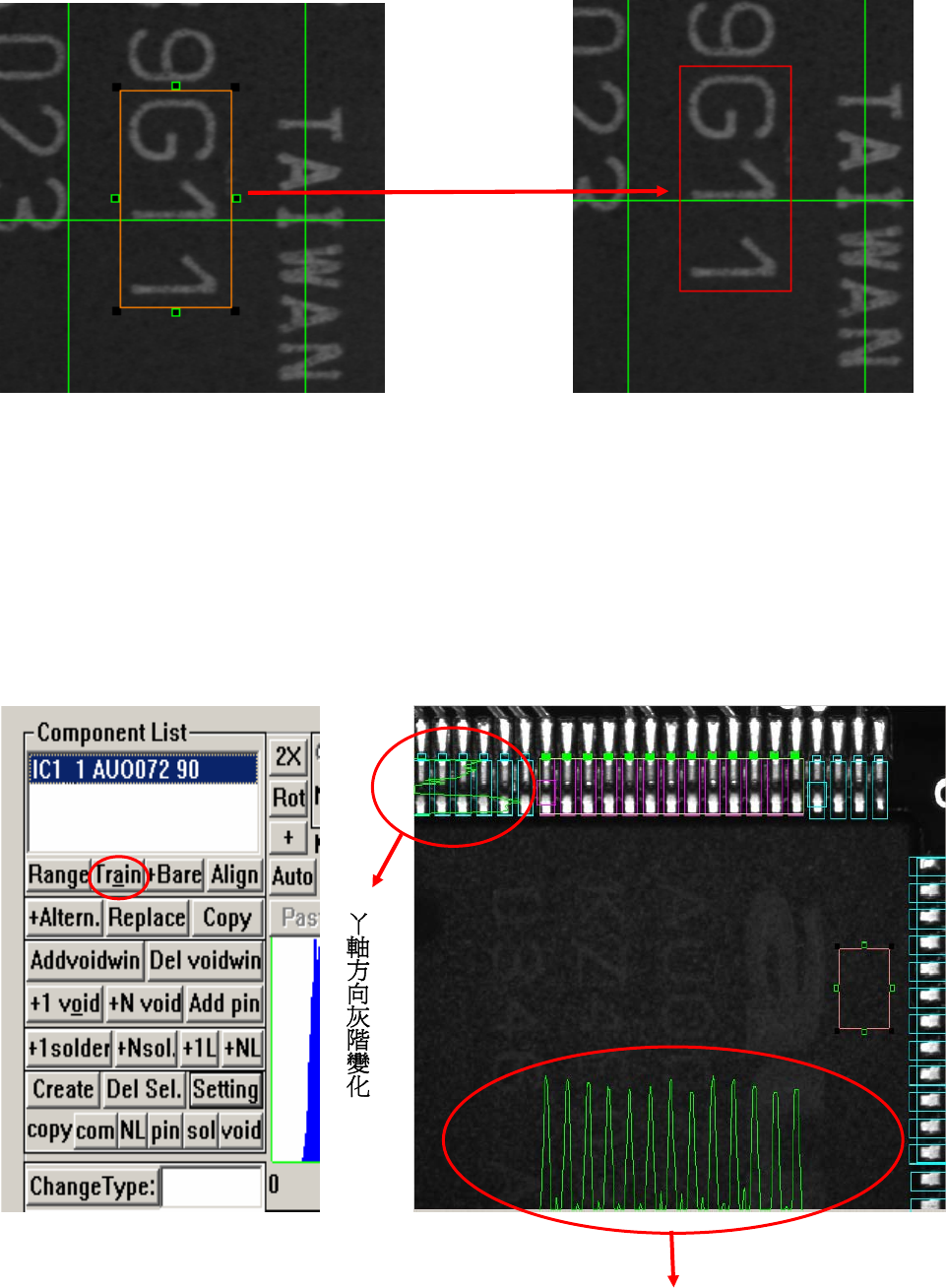
確認此檢測框大小及位置後,點選單顆元件編輯區內的 Train,可將檢測框內的影像攫取下來
(註:所有未轉換(Train)過的檢測框,並不會做檢測的動作)。
關於 Lead、Lead_Void 檢測框以及 Lead_Align 定位框,在 Library 就己調整好檢測框的大小
以及腳與腳之間的間距,在此只須將檢測框直接拖曳至欲檢測的位置,點選單顆元件編輯區內
的 Train,此時 Lead_Align 定位框會同時記住框內 X,Y 方向的灰階變化(如下圖所示)
X 軸方向灰階變化
51
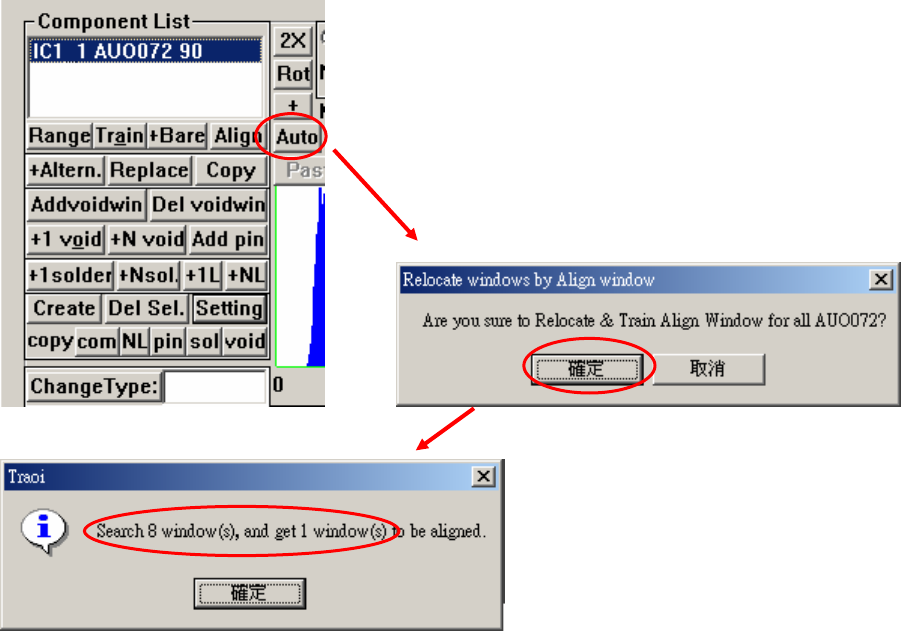
將滑鼠指標點到 Lead_Align 定位框,再點選單顆元件編輯區內的 Auto,系統會告知是否做自
動定位,點選確定後,此時此顆 IC 同一種類所有的 Lead、Lead_Void 檢測框,會依據這個
Lead_Align 定位框內 X,Y 方向的灰階變化,完成自動定位(Relocate)和轉換(Train)的動
作,並顯示搜尋到(Search)幾個而完成了(get)幾個 Lead_Align 定位框,編輯流程如下圖
所示:
52
註1:若滑鼠指標沒有點到 Lead_Align 定位框,系統不會知道你要做自動定位的動作,此時
點選 Auto 就不會有任何反應。
註2:Align 是記錄 X,Y 方向灰階變化的自動定位系統,當你轉換(Train)它時,所教導 X
(或 Y)方向的灰階是 10 隻腳,則它只能搜尋到 1~9 隻腳的 Align,因它無法預測未知
的灰階變化(如 11 隻腳以上),故當我們在做 Align 定位時,可選擇腳數較多的去做搜
尋和比對。
一般而言,在 Top Camera 下對 Chip 類的元件使用的光源和 IC 類不同(燈光值敘述如下),
但一張圖像(FOV)裡可能存在著 Chip 類元件以及 IC 類元件,卻又只能使用一種光源,以下
提供兩種方法來解決。
Top Front Rear Left Right
Chip 類元件 50~70 50~70 50~70 50~70 50~70
IC 類元件 100~150 0 0 0 0
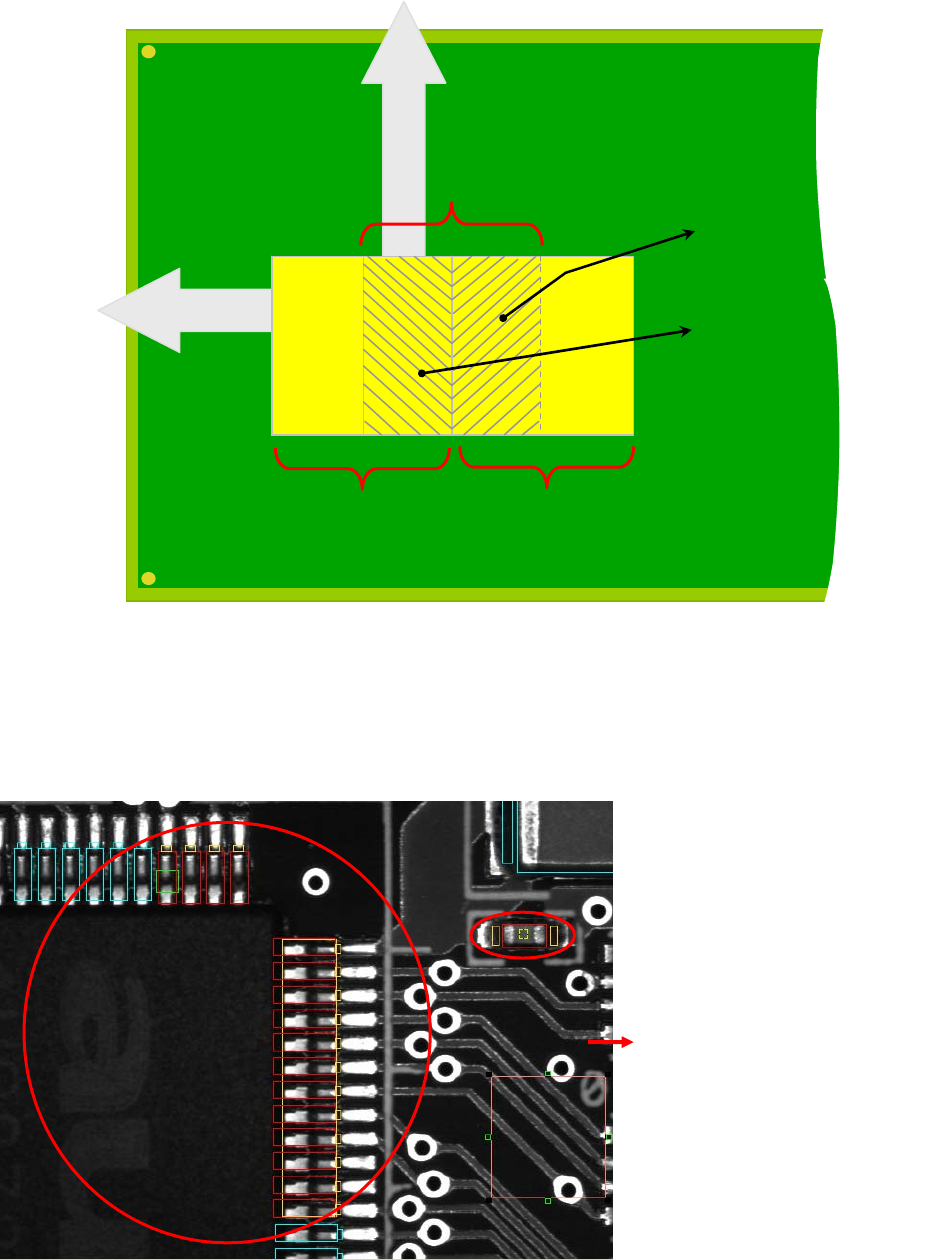
1.檢測框搬移:因為系統在分割圖像時,每一張圖像左右各重疊 1/2(上下並沒有),如下圖所
示,
FOV 1
FOV 3
FOV 2
FOV 1 & 2 間重疊的部
FOV 2 & 3 間重疊的部
垂直方向
水平方向
所以當我們遇到同一個 FOV 存在著 Chip 類元件以及 IC 類元件時,可將其中
一類的元件搬移到左右的 FOV 裡(搬移編輯流程如下圖所示),以達到光源的
一致性。
此FOV裡 Chip類和IC
類同時存在(燈光值
Top100 其他0)
53