德律-AOI-TR-7100程式撰写流程(炉後) - 第57页
將多功能框調整至適當大小並 移動到卻攫取影像定位的位置 點選 SetW arp 完成影像攫取的 動作 57 參數設定: 在完成所有元件檢測框的編輯流程後,開始設置每一種類 (T ype) 的參數值,可點選 上方快捷列上的 TYPE (如下圖所示) : 亦可攫取固定機械孔的影像來 做定位以及補償
56
由上圖可知,其編輯流程和 Lead_Align 是一樣的,故遇到 Lift_Void(Lift_Align)也是一樣的作
法,Align 主要在於提供快速又簡便的定位方法,但並非所有檢測框都適用,以下介紹另一種
定位方法(Set Warp),來提供使用者更彈性的運用。
Set Warp 定位方法:之前所述的 Align 是採取記錄 X,Y 方向的灰階變化來做定位,只適用在多
腳 IC 類( 因 X,Y 方向的灰階變化明顯),並且只能針對單一個檢測框組,
而 Warp 則是對整個圖像(FOV)所有的檢測框,利用影像比對來做定位
的效果。
一般而言,在 Front、Rear、Left、Right Camera 裡,除了有 Align 定位的檢測框,其他每一
個 FOV 裡都必須設 Warp,用來校正檢測框之偏移及作板彎的補償,而 Warp 所要攫取的定位
影像一般是設在 PCB 上固定的機械孔或者是元件本身的 IC 腳,實際設置過程如下圖所示:
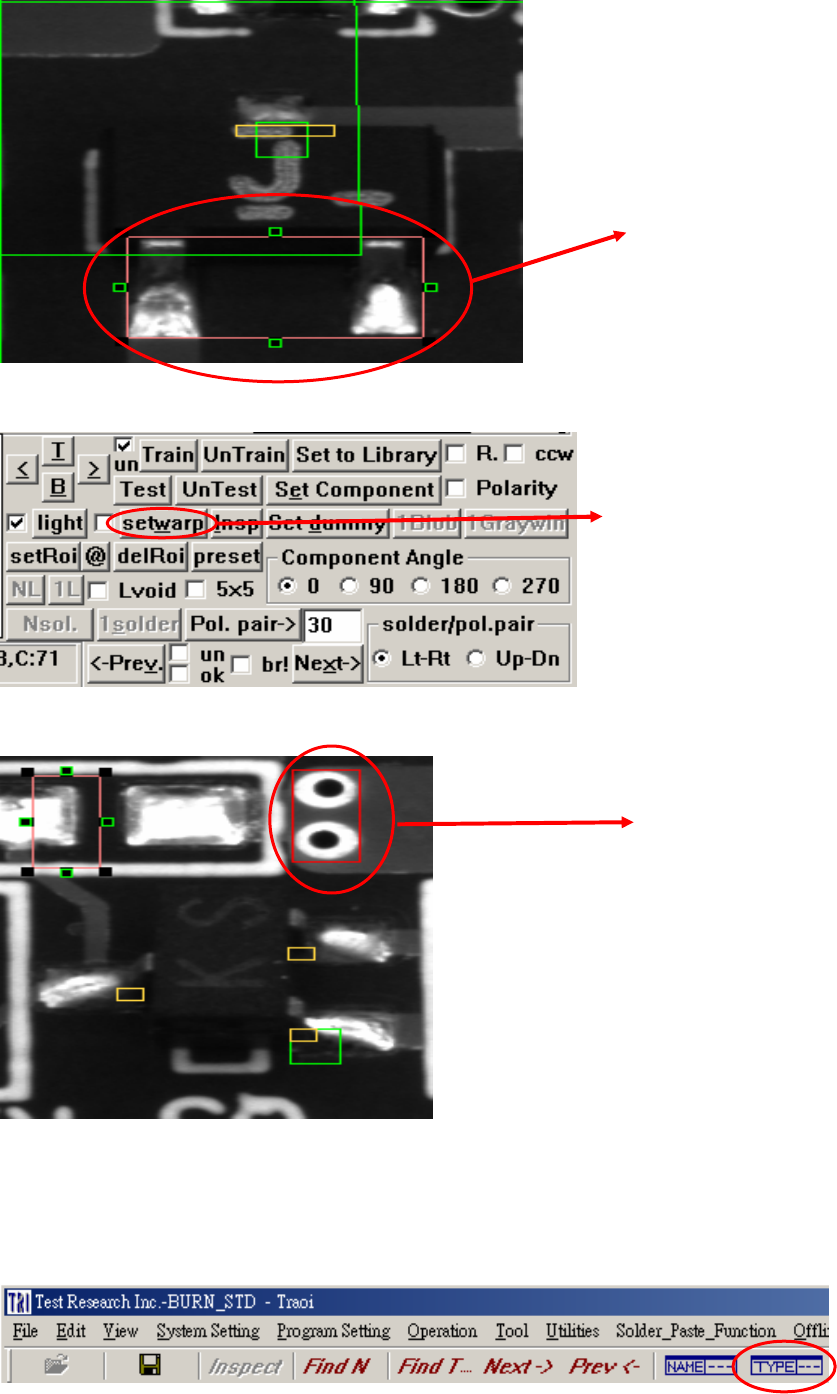
將多功能框調整至適當大小並
移動到卻攫取影像定位的位置
點選 SetWarp 完成影像攫取的
動作
57
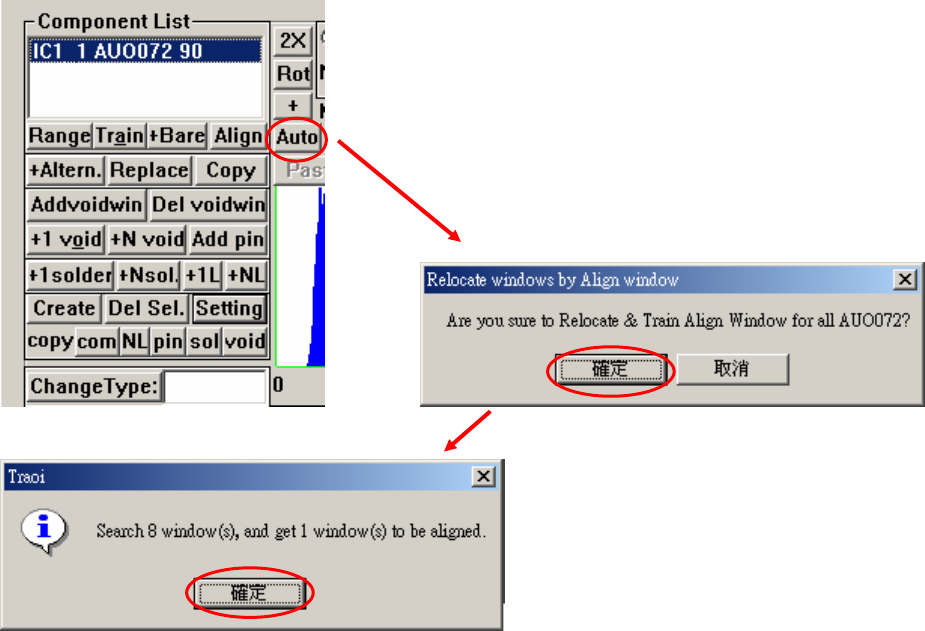
參數設定:在完成所有元件檢測框的編輯流程後,開始設置每一種類(Type)的參數值,可點選
上方快捷列上的 TYPE(如下圖所示):
亦可攫取固定機械孔的影像來
做定位以及補償
點選後出現如下圖所示狀態
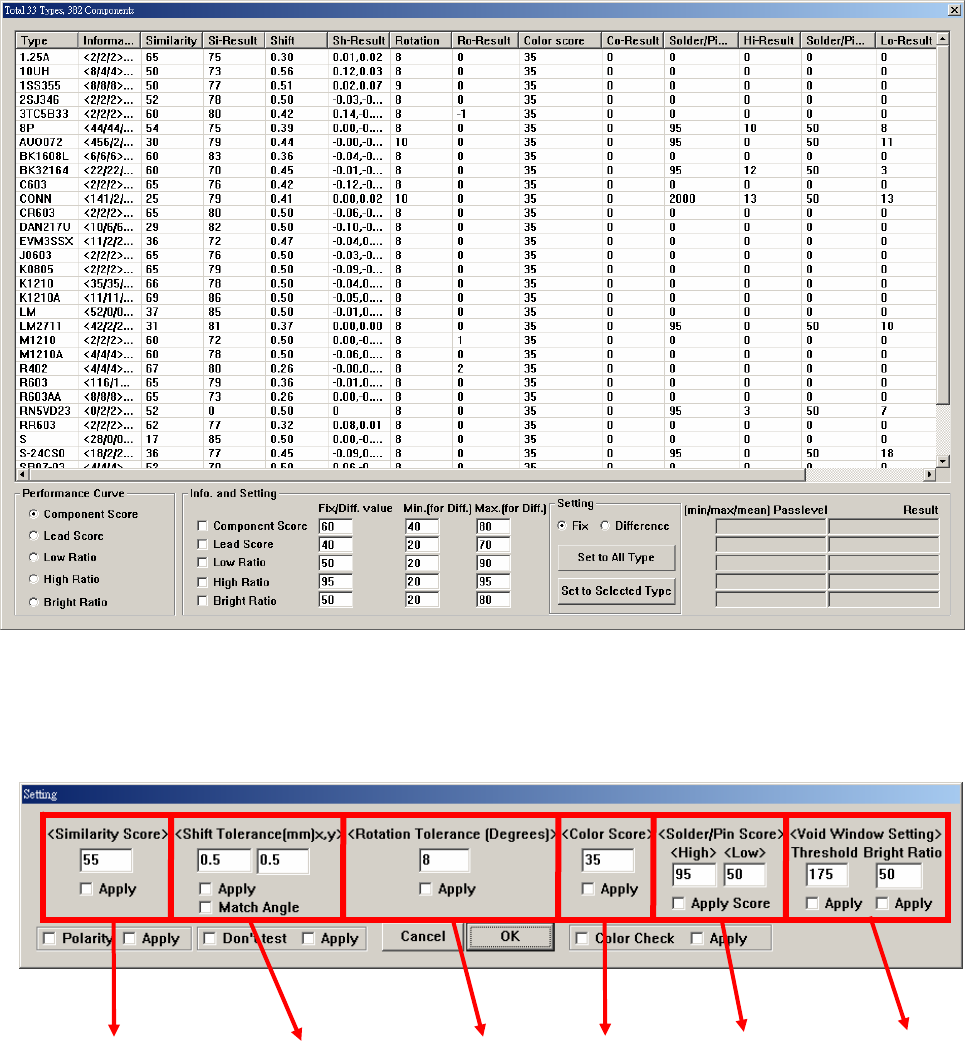
在所要改變參數的那一列中,點擊滑鼠左鍵兩下,即可出現該 Type 所有的參數值(如下圖所
示)。
影像相似度參數值,下
方 Polarity 勾選後,可
判別影像反 180 度,若
沒勾選,則系統會默認
反 180 度的影像亦可
(如 Chip 類)
元件 X,Y 偏
移量參數值
元件旋轉
角度參數
值
元件顏色
參數值
Pin_Window
面積上下限
參數值
Void_Windo
w 灰階、面積
參數值
註:每次在修改參數值後,必須點選 Apply,則修改後的數值才會套用進去。
58