SOM-1935-001_w.pdf - 第12页
9 Tg 1410 -ID-SO 0704-001 3.2.2 基板の準備 基板 B面 A面 Fig. 3 手順 (1) バックアップピン位置ティーチングする面 (A 面 ) を上向 きに反転して、基板を L コンベアにセットします。 このとき基板は手前から奥へ反転させてセットしてくださ い。 B面 A面 Fig. 4 注 意 (a) 左右に回転させて裏向けた場合は間違った座標をティーチ ングしてしまいます。 (b) 必ず両面とも部品搭…
8
Tg1404-ID-SO
0704-001
3.2 生基板からのティーチング手順
基板認識カメラを基板上で移動させ、カメラ画像から、基板バック
アップピンがセット可能な位置を教示します。
3.2.1 データの準備
バックアッププレートの種類を選択します。
手順
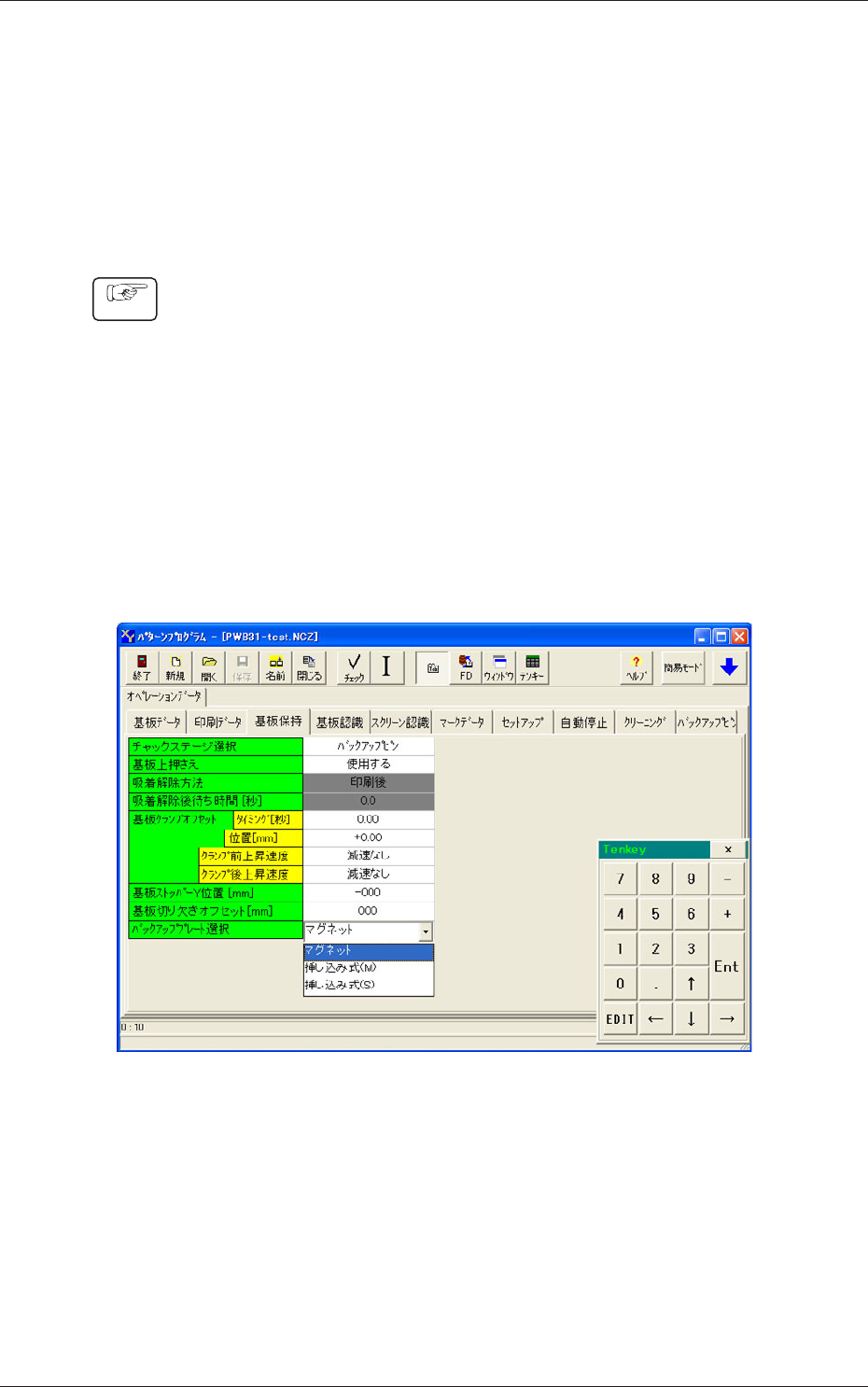
(1) パターンプログラム編集画面で“オペレーションデータ”
タブの“基板保持”タブを押します。
(2) “チャックステージ選択”で“バックアップピン”を選択
します。
(3) “バックアッププレート選択”で、使用するプレートの種
類を選択します。
マグネット
挿し込み式 (M) : 336 × 250
挿し込み式 (S) : 256 × 200
Fig. 2 “基板保持”タブシート
3.2 生基板からのティーチング手順
9
Tg1410-ID-SO
0704-001
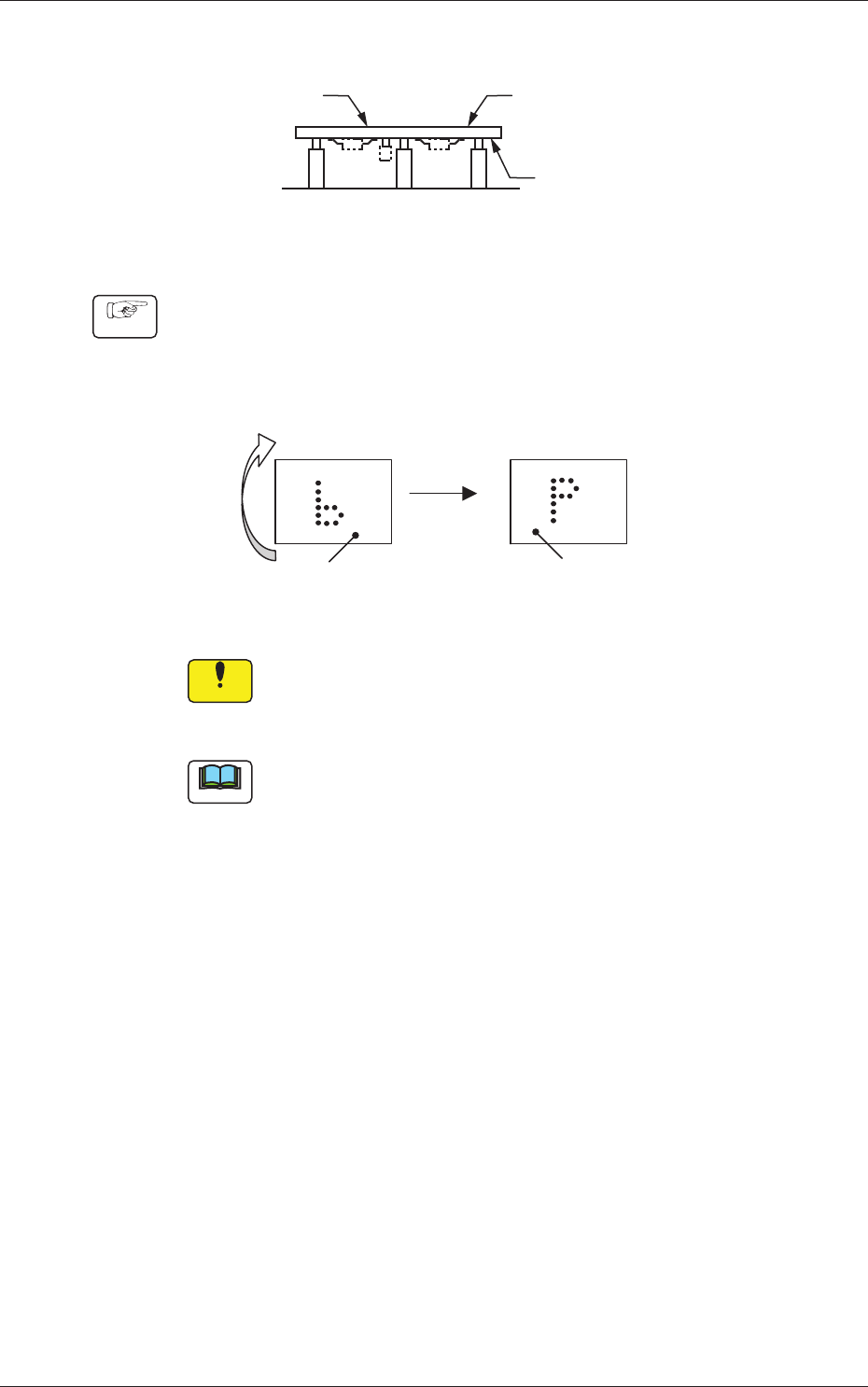
3.2.2 基板の準備
基板
B面
A面
Fig. 3
手順
(1) バックアップピン位置ティーチングする面 (A 面 ) を上向
きに反転して、基板を L コンベアにセットします。
このとき基板は手前から奥へ反転させてセットしてくださ
い。
B面 A面
Fig. 4
注 意
(a) 左右に回転させて裏向けた場合は間違った座標をティーチ
ングしてしまいます。
(b) 必ず両面とも部品搭載前の基板を使用してください。
ノート
“運転方法設定”画面での選択により、テーブル、R コンベア
にセットする場合もあります。
(2) “バックアップピン座標教示”タブシートの [ 基板位置決
め ( 始動 )] ボタンを押し、前面操作パネルの [ 始動 ] ボ
タンを押します。
L コンベアから基板を取り込み、位置決めを行います。
3.2 生基板からのティーチング手順
10
Tg1404-ID-SO
0704-001
3.2.3 カメラの移動操作
手順
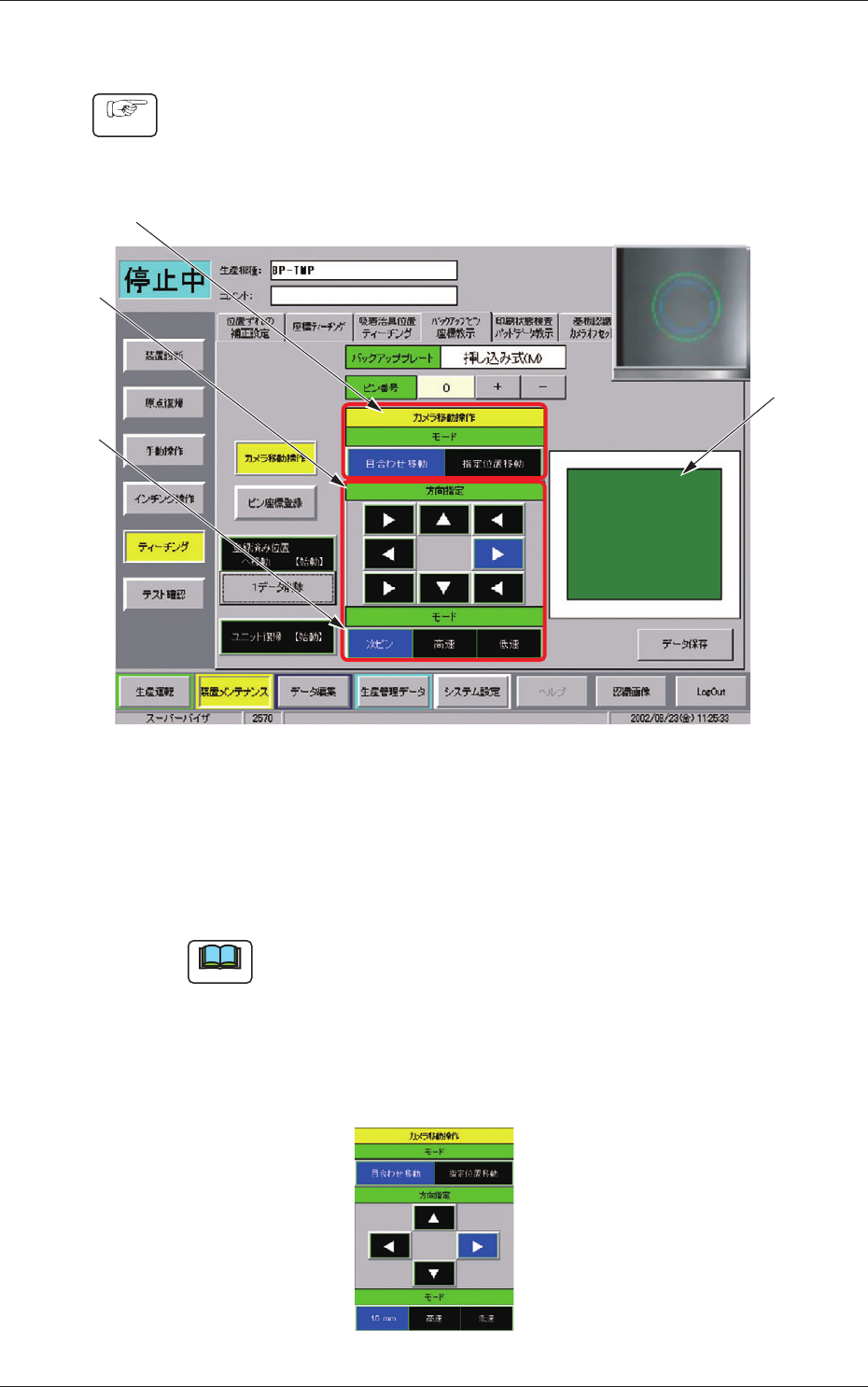
(1) “バックアップピン座標教示”タブシートの [ カメラ移動
操作]ボタンを押して、“カメラの移動操作”ウィンドウ
を表示させます。
[1]
[2]
[3]
[4]
Fig. 5
(2) “[1] カメラ移動操作”の [ 目合わせ移動]ボタンを押し、
“[2] 方向指定”の矢印ボタン、“[3] モード”の [ 高速 ]
または [ 低速 ] ボタンで基板認識カメラを基板上の基板
バックアップピンがセット可能な位置へ移動します。
ノート
(a) [ 指定位置移動 ] ボタンを押して、[4] に表示されている“基
板モデル”をタッチすることでおおまかな位置を指定して、
カメラを移動させることもできます。
(b) マグネットプレートを使用している場合は、[ 目合わせ移
動 ] ボタンを押すと、“モード”に [10 mm] ボタンが表示
され、10 mm ずつの移動ができます。
Fig. 6
3.2 生基板からのティーチング手順