SM431说明书.pdf - 第169页
Head Module 4-45 4.7.4. Motor 替换次序 1. 执行 ”4.7.3 T iming belt (Page4-3)” No.1~No.4 的第③项目之前的过程 2. 参考下图拆卸需要更换马达的对 应连连接线。 . CN1 : 4 个 Motor Power 传送 Connector CN2 : 4 个 Motor Encoder 传送 Connector CN3 : Z1 Motor Power & E…
Samsung Component Placer SM431 Service Manual
4-44
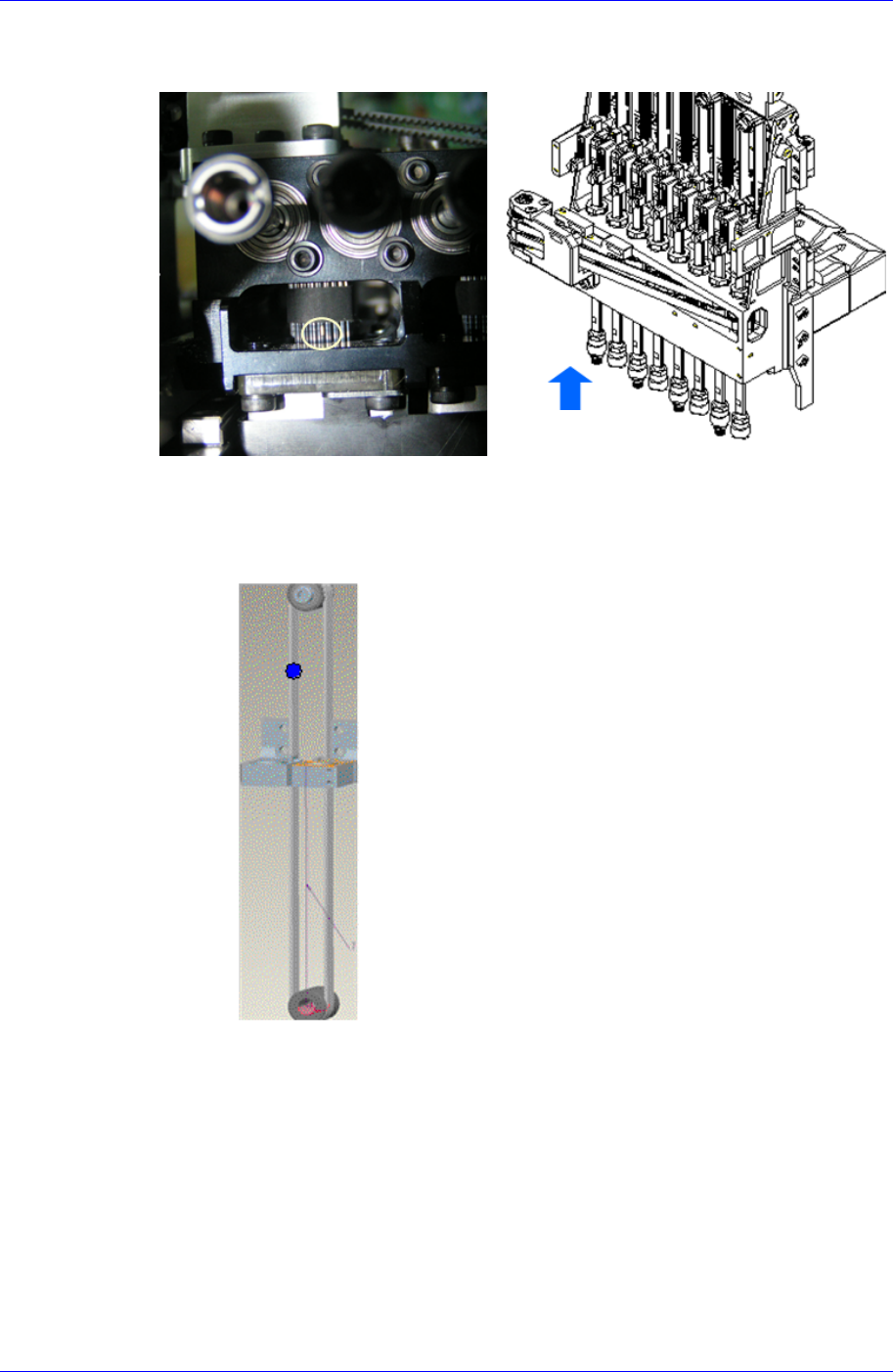
5. 各Nozzle的高度相同时,如下图使Pulley上Z相标记的部分置于12点方向组装传
送带。
6. 利用测定仪,设置张力的方法如下。
z 请利用Unitta测定仪,在皮带的中央测定同步齿型带张力。(检查基准:
-270~330Hz)
7. 需要以下的Calibration作业。
Head Z/R Axis Offset 执行 (请参照“3.1.10.2 Head Z / R Offset Calibration
(Page3-3)”).
请确认ANC是否正常工作。
Head Offset Calibration 执行 (请参照“3.1.10.3 Head Offset Calibration
(Page3-3)”).
R Axis Offset Calibration 执行 (请参照“3.1.10.7 R-Axis Offset Calibration
(Page3-3)”).
View Direction
•
Measujrement Position
Head Module
4-45
4.7.4. Motor 替换次序
1. 执行”4.7.3 Timing belt (Page4-3)” No.1~No.4的第③项目之前的过程
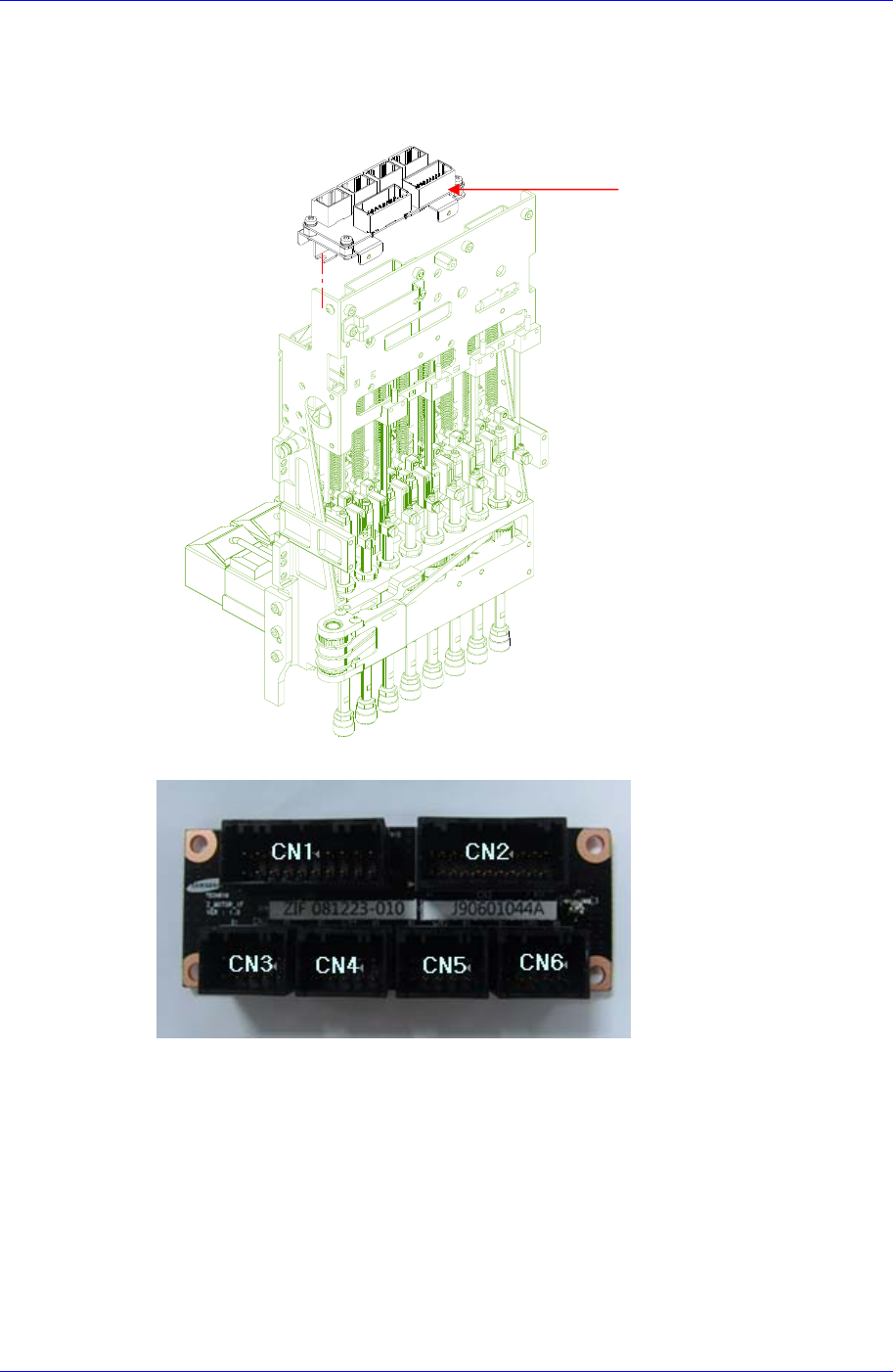
2. 参考下图拆卸需要更换马达的对应连连接线。
.
CN1 : 4个 Motor Power 传送Connector
CN2 : 4个 Motor Encoder 传送Connector
CN3 : Z1 Motor Power & Encoder
CN4 : Z2 Motor Power & Encoder
CN5 : Z3 Motor Power & Encoder
CN6 : Z4 Motor Power & Encoder
Z-Motor IF Board
Samsung Component Placer SM431 Service Manual
4-46
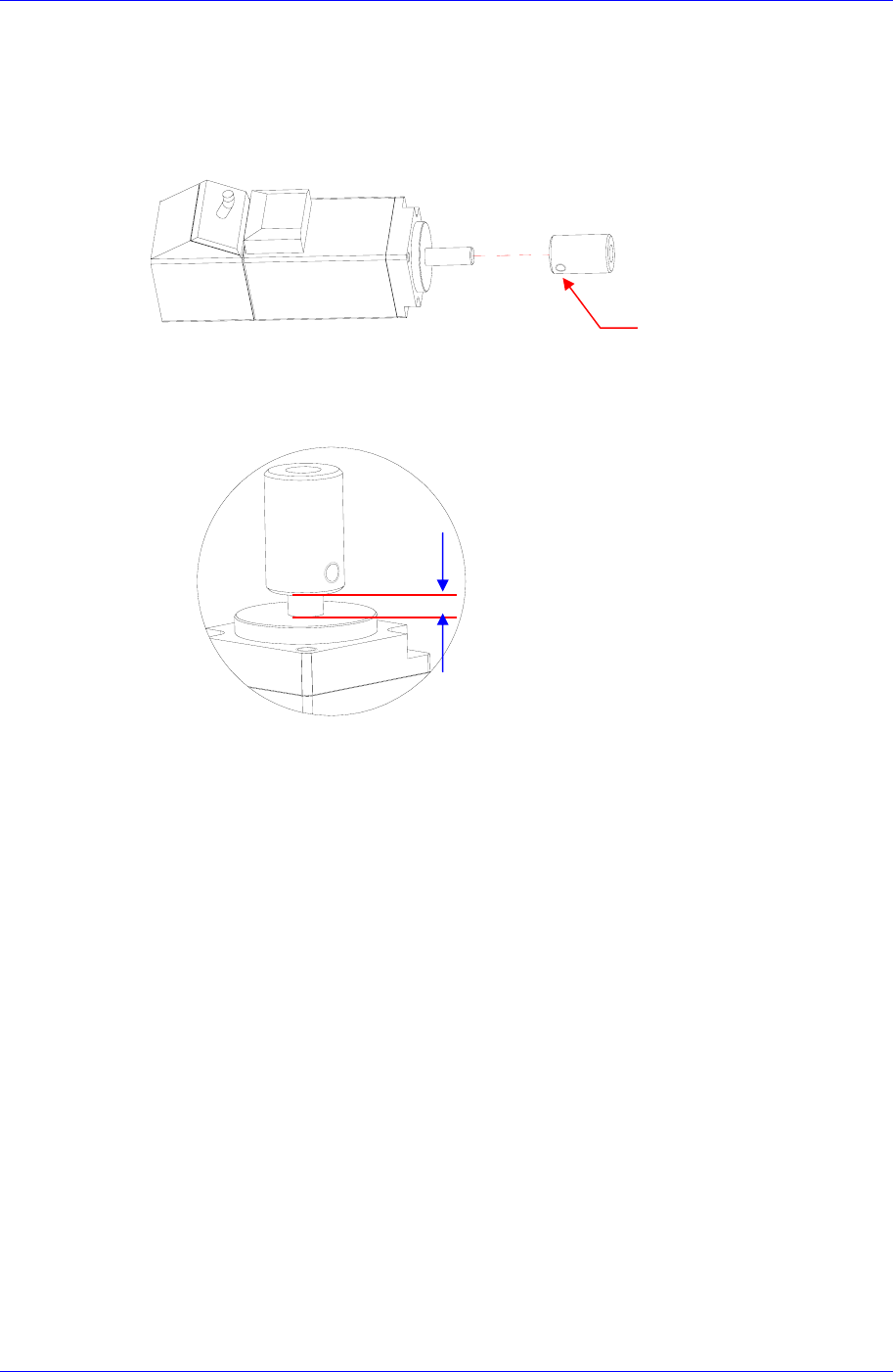
3. 拧开固定螺丝(4-M3*8)后分离马达.
4. 利用扳手除去Set Screw后分离电动机皮带轮。
5. 如下图把皮带轮组装到电动机上,重新连接电动机电缆。
6. 利用固定螺丝(4-M3*8)把马达固定在Head机体上。之后,参考更换同步齿形
带的5号措施组装同步齿形带。
7. 完成,则打开设备前面的Main Switch,启动PC。
8. 确认Ball spline Nut周边有无污渍,利用真空清扫仪清扫干净。如果 Ball spline
Nut中流入污渍,将影响到设备的性能。
9. 请执行 “4.6.3 R-Axis Motor/Timing belt(Motor axis) (Page4-3)” 的7号Z相的搜
索过程。
10. 需要以下 Calibration作业。
Head Z/R Axis Offset 执行. (请参照“3.1.10.2 Head Z / R Offset Calibration
(Page3-3)”.)
请确认ANC是否正常工作。
Head Offset Calibration 执行. (请参照“3.1.10.3 Head Offset Calibration
(Page3-3)”.)
R Axis Offset Calibration 执行. (请参照“3.1.10.7 R-Axis Offset Calibration
(Page3-3)”.)
11. 确认马达驱动器的电源是否有异常。没有另外的Display窗口只能用驱动器上面
中间的LED1的亮灯状态来确认电源是否有异常。(只有开启设备的READY
Switch状态下才能供应驱动器的电源)
12. 为确认是否正常贴装部件,请执行测试。
1.5 m
m
Set Screw