00196512-02_UM_X-Serie_SR705_PL.pdf - 第132页
Dane techniczne automatu Instrukcja eksploatacji SIPLACE seria X G ł owica uzbrajaj ą ca Od wersji oprogramow ania SR.70x.xx Wydanie 01/2011 132 3.5.2.5 Pozycje mont a ż owe g ł owicy MultiSt ar w automatach 3.5.2.6 G ł …
Instrukcja eksploatacji SIPLACE seria X Dane techniczne automatu
Od wersji oprogramowania SR.70x.xx Wydanie 01/2011 Głowica uzbrajająca
131
– Zmieniacz Matrix Tray Changer
– TwinStar
3.5.2.3 Klasyfikacja przetwarzanej gamy podzespołów
3
3.5.2.4 Tryby uzbrajania głowicy MultiStar
Zależnie od klasy podzespołów głowica CPP działa w różnych trybach uzbrajania. Funkcja opty-
malizacji uzbrajania wybiera tryb uzbrajania o minimalnych czasach taktu. Poniższa tabela przed-
stawia związek między klasą podzespołów i trybem uzbrajania.
Tab. 3.5 - 2 Zależności między klasą podzespołów i trybami uzbrajania
3
Klasa
podzespołu
Wielkość
podzespołu
Pozycja
montażowa
a
głowicy CPP
Wysokość
podzespołu
Typ kamery do
podzespołów
Mały podzespół
K_BE
01005
b
-
27 x 27 mm²
górna do 8,5 mm
Kamera głowicowa,
typ 30
dolna do 6 mm
01005
b
-
16 x 16 mm²
dolna do 6 mm
Kamera głowicowa,
typ 38
Średni podzespół,
Typ M_BE_1
< 27 x 27 mm²
górna
między 8,5 i
11,5 mm
Stacjonarna kamera
do podzespołów,
typ 33
(patrz punkt 6.7.1
,
strona 406
)
dolna niemożliwe
Średni podzespół,
Typ M_BE_2
między
27 x 27 mm² i
32 x 32 mm²
górna 11,5 mm
dolna niemożliwe
Duży podzespół
G_BE
między
32 x 32 mm² i
50 x 40 mm²
górna do 11,5 mm Stacjonarna kamera
do podzespołów,
typ 33
dolna niemożliwe
Tab. 3.5 - 1 Klasyfikacja przetwarzanej gamy podzespołów
a) Przestrzegaj zasad dotyczących wysokości pozycji montażowych, zawartych w punkcie 3.5.2.2, strona 130.
b) Podzespoły 01005: typ kamery 30; kamera typu 38 zalecana przy wysokich wymaganiach jakościowych
Tryb uzbrajania Klasa podzespołów
Mały podzespółŚredni podzespół Duży podzespół
Tryb Collect&Place Tak Nie Nie
Tryb mieszany Tak Tak Nie
Rozszerzony tryb
Pick&Place
Tak Tak Tak
Czysty tryb
Pick&Place
Nie Nie Tak
Dane techniczne automatu Instrukcja eksploatacji SIPLACE seria X
Głowica uzbrajająca Od wersji oprogramowania SR.70x.xx Wydanie 01/2011
132
3.5.2.5 Pozycje montażowe głowicy MultiStar w automatach
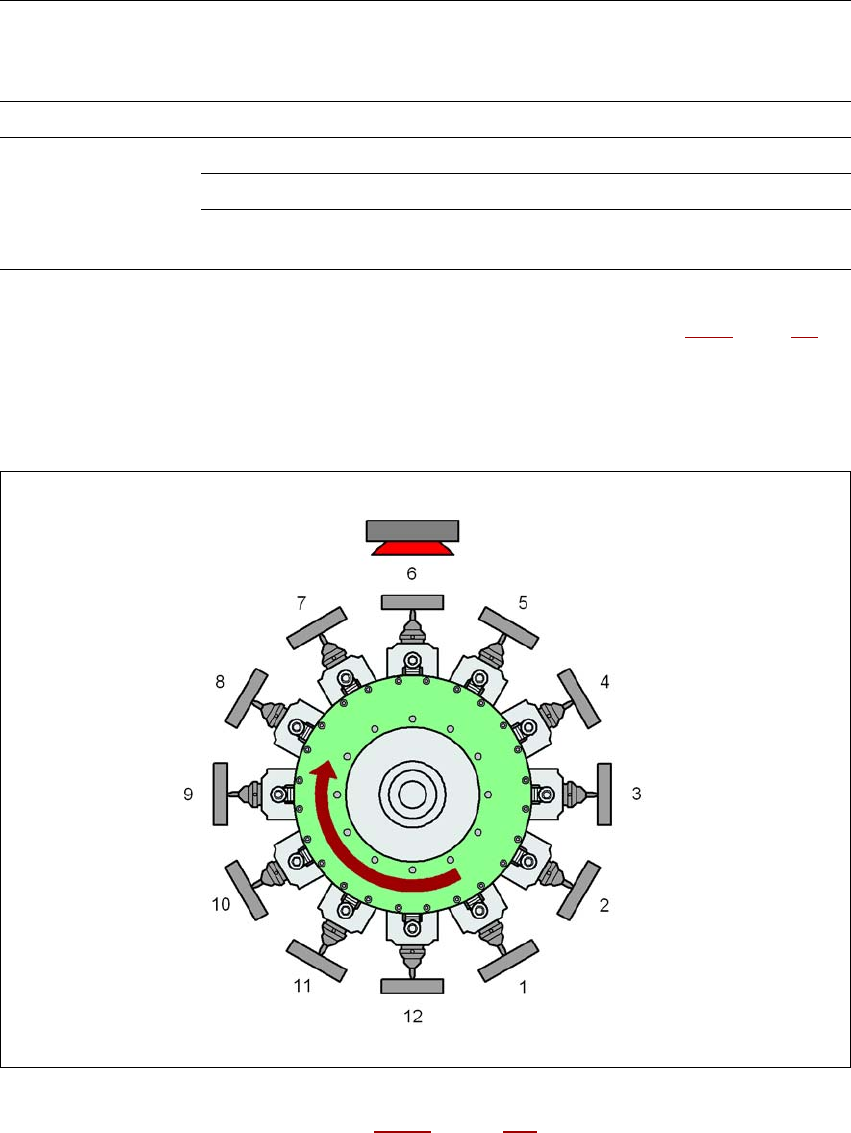
3.5.2.6 Głowica MultiStar w trybie Collect&Place
W tym trybie głowica MultiStar przetwarza małe podzespoły.
3
Rys. 3.5 - 6 Głowica MultiStar w trybie Collect&Place
K_BE Mały podzespół (patrz tabela 3.5 - 1, strona 131)
Typ 30/38 Kamera do podzespołów, typ 30 lub typ 38
1 ... 12 Kolejność pobieranych podzespołów
Automat do
uzbrajania
Pozycja
montażowa
a
głowicy CPP
Maksymalna
szerokość
podzespołu
Kamera
wizualizacyjna
SIPLACE X4I tylko dolna 6 mm Kamera głowicowa
SIPLACE X4, X3, X2 dolna 6 mm Kamera głowicowa
górna 8,5mm Kamera głowicowa
tylko górna 11,5 mm
Stacjonarna kamera do
podzespołów
Tab. 3.5 - 3 Pozycje montażowe głowicy CPP w automatach
a) Przestrzegaj zasad dotyczących wysokości pozycji montażowych, zawartych w punkcie 3.5.2.2, strona 130.
Typ 30/38
K_BE
Instrukcja eksploatacji SIPLACE seria X Dane techniczne automatu
Od wersji oprogramowania SR.70x.xx Wydanie 01/2011 Głowica uzbrajająca
133
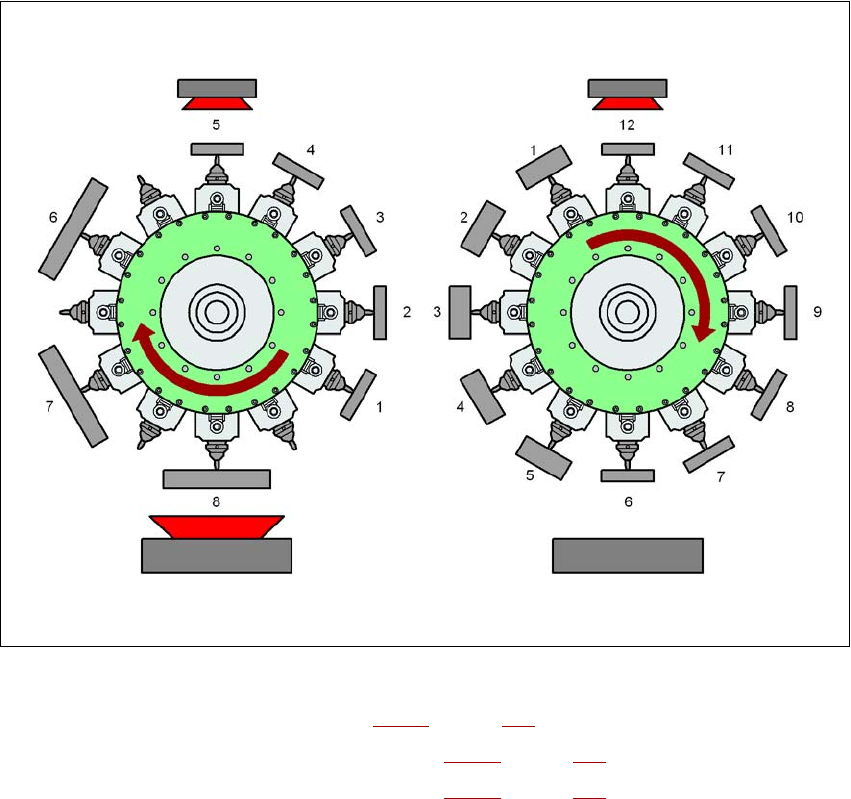
3.5.2.7 Głowica MultiStar w trybie mieszanym
W tym trybie przetwarzane są podzespoły małe do średnich.
3
Rys. 3.5 - 7 MultiStar - tryb mieszany
K_BE Mały podzespół, patrz tabela 3.5 - 1, strona 131
M_BE_1 Średni podzespół, typ 1 (patrz tabela 3.5 - 1, strona 131)
M_BE_2 Średni podzespół, typ 2 (patrz tabela 3.5 - 1
, strona 131)
Typ 30/38 Kamera do podzespołów, typ 30 lub typ 38
Typ 33 Stacjonarna kamera do podzespołów, typ 33
1 ... 8 Kolejność pobieranych podzespołów
1 ... 12 Kolejność pobieranych podzespołów
3
Sąsiadujące segmenty głowicy CPP nie mogą pobierać podzespołów typu M_BE_2, jeżeli prze-
kątna średniego podzespołu, typ 2 (M_BE_2) jest dłuższa niż 39,8 mm.
Typ 30/38 Typ 30/38
Typ 33 Typ 33
K_BE
M_BE_2
M_BE_1
K_BE