SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第191页
1 - 25 S tudent Guide SIPLACE HF/HF3 Edition 09/2005 5 Gantry 25 Please Note: Use an RC - filter to record the current curve. Measure the end signal on the ad apter board "a xis test box", with the switch press…
1 - 24
Student Guide SIPLACE HF/HF3
5 Gantry Edition 09/2005
24
5.5.2 Check dynamic X-axis
The inspection of dynamics occurs with the following signals:
– Deviation of position
– Nominal current
– End signal ( Adapter board Axis in target position)
– Actual position = nominal position ( Axis testbox Output end signal)
Please Note:
To check the axis dynamic, please use the "Adjustment manua HF platform".
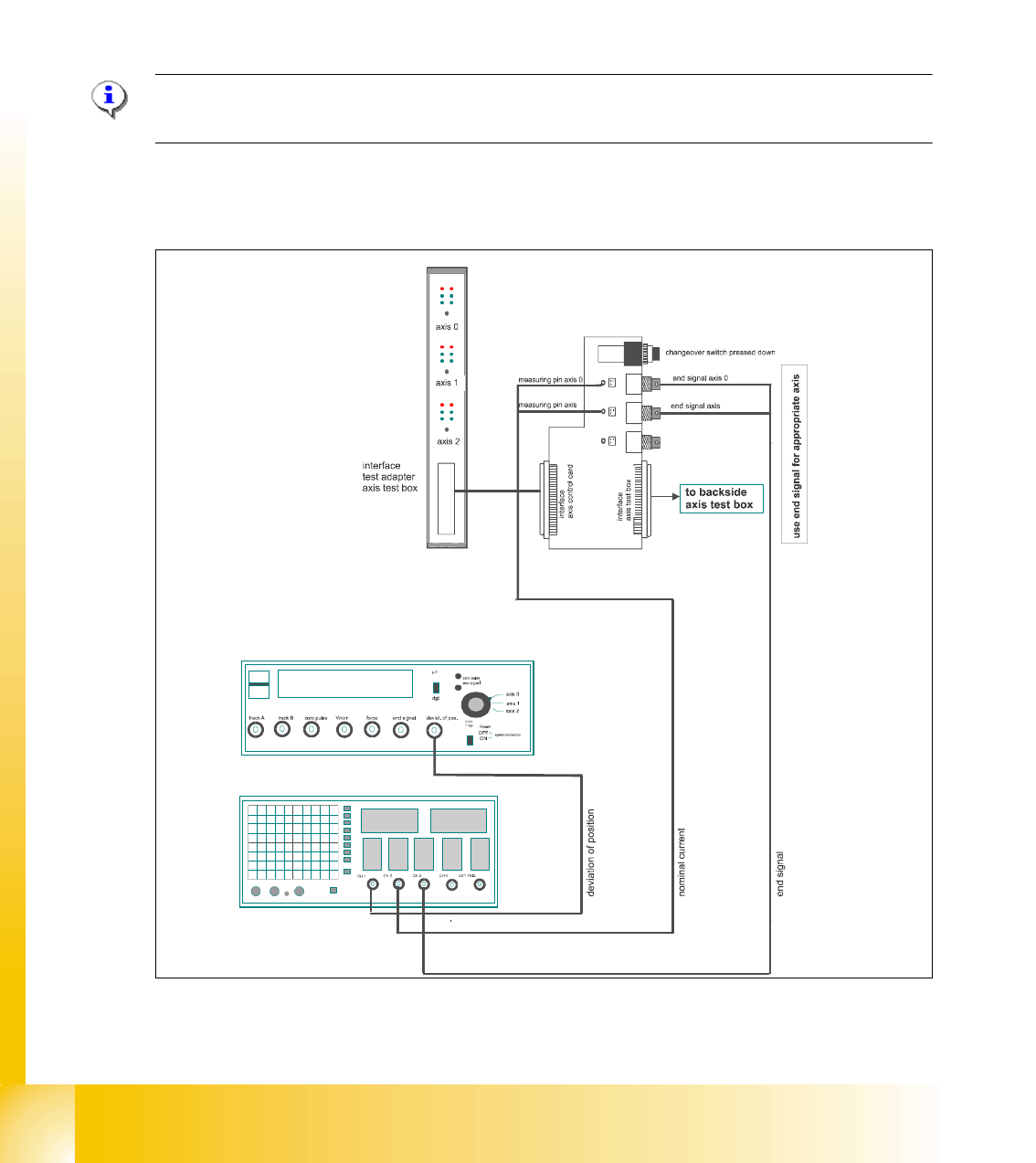
5.5.2.1 Test setup with Axis testbox
Fig. 5.5 - 2 Test setup to check the dynamic ,Gantry
– An additional connector on channel 4 is the actual pos.=nom.pos. signal from the axis testbox.
11
1 - 25
Student Guide SIPLACE HF/HF3
Edition 09/2005 5 Gantry
25
Please Note:
Use an RC - filter to record the current curve.
Measure the end signal on the adapter board "axis test box", with the switch pressed down. 5
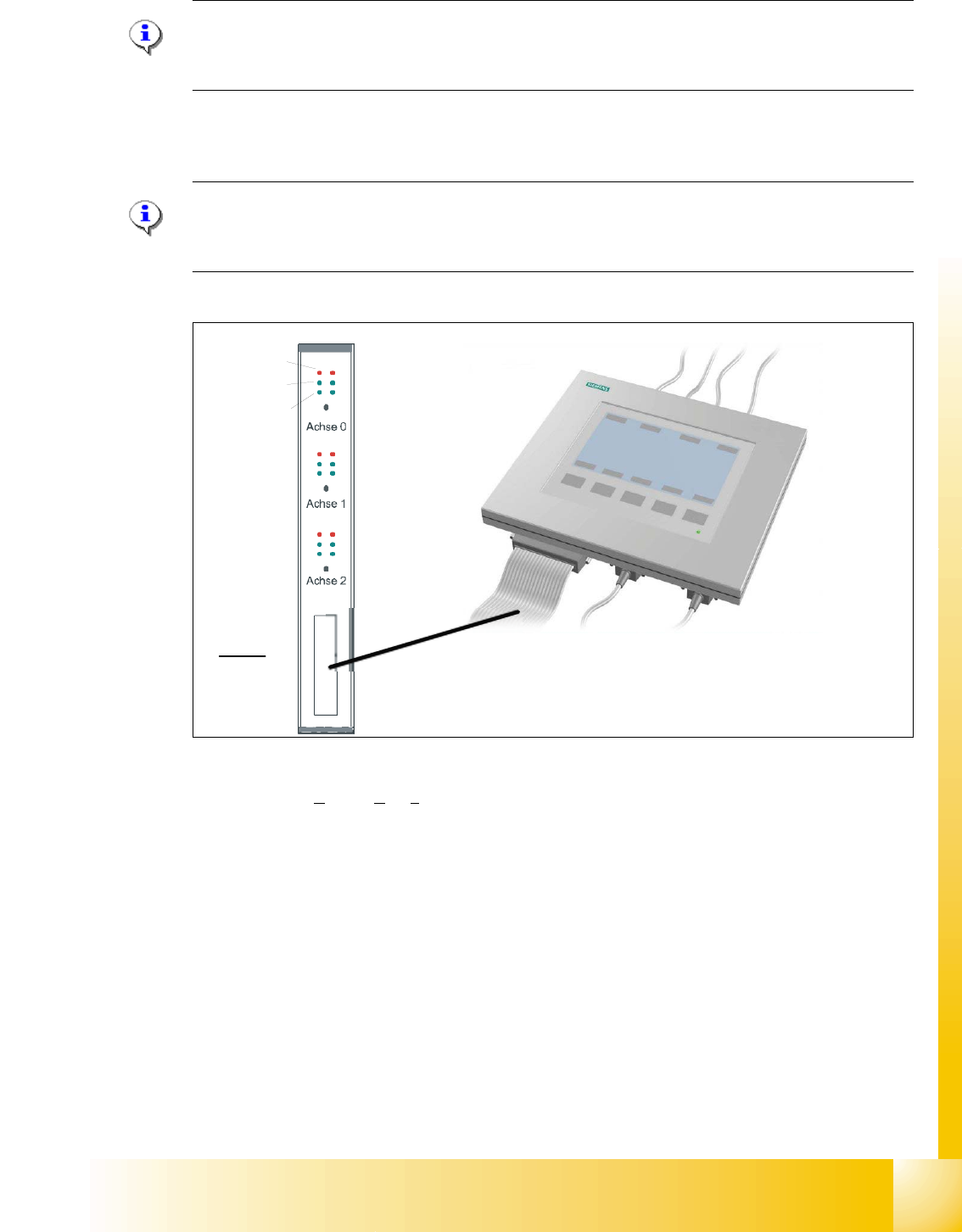
5.5.2.2 Test setup with SAT-Box
Please Note:
The setting on the SAT-Box together with the SITEST -Progam are described in the adjustment
manual. 5
Fig. 5.5 - 3 Test set up SAT-Box
Legend outputs Siplace Axis Tester to oscilloscope channels
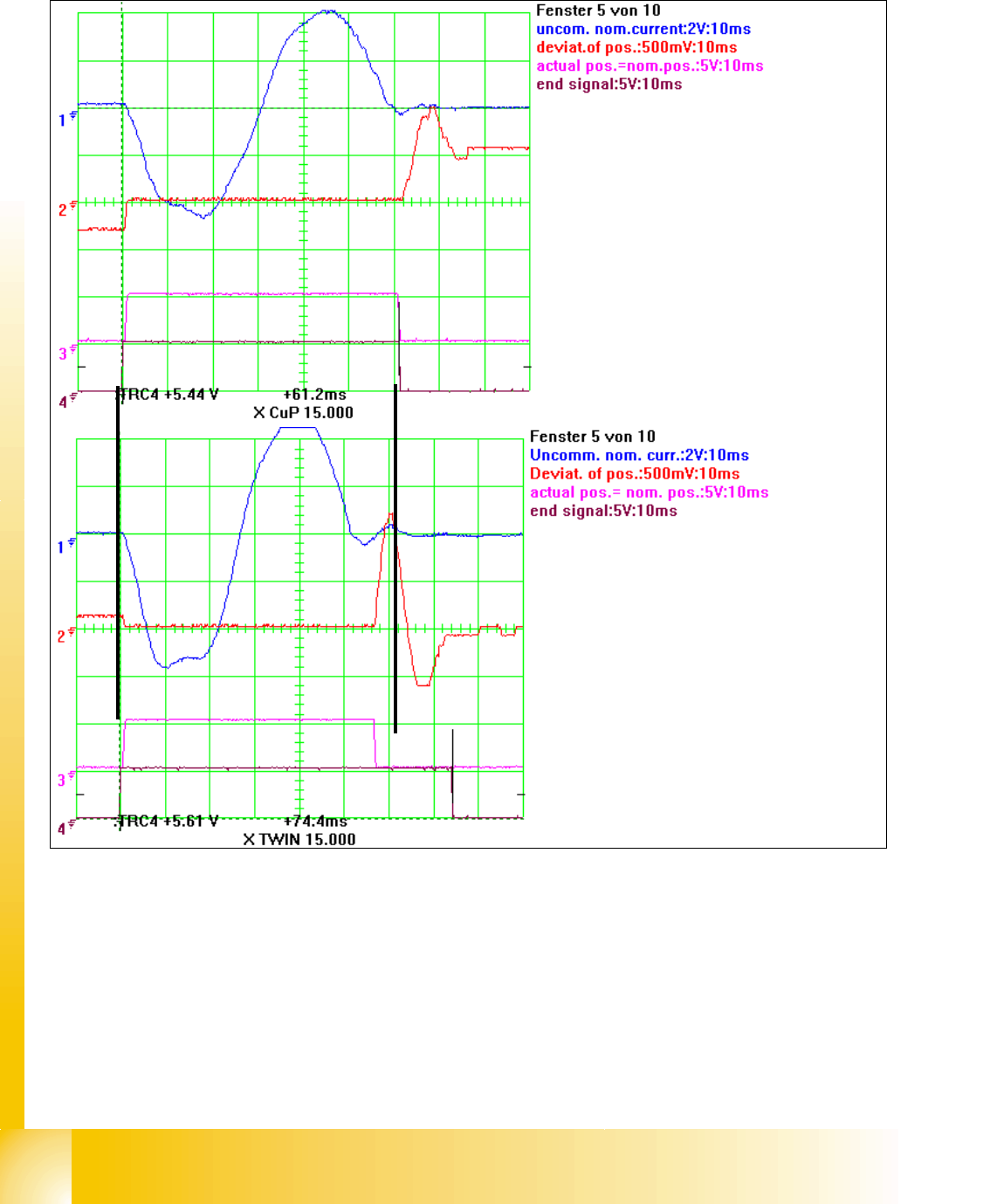
On account of the higher accuracy requirements at a gantry with Twin head, may be the X- and Y
axes with different controller parameters compared to a gantry with C&P head operated (see fol-
lowings diagrams).
(1) Nominal current (Vreg)
not connected to the scope for HF
(2) uncommutated nominal current
connect to CH2
(3) Deviation of position connect to CH1 (4) End signal connect to CH 3
Axis unit error
Servo ON
Initialize
Counter error
Zero puls
End signal
Interface:
Test adapter,
Axis test box,
SAT-Box
2
4
1
3
1 - 26
Student Guide SIPLACE HF/HF3
5 Gantry Edition 09/2005
26
Example travel profile X-axis for the twin head and C&P head in comparison 5
Fig. 5.5 - 4 Dynamic Signals at15000 digit distance for X-Axis C&P head on top and Twin head at bottom
Legend
3
21
(1) Start of the axis (2) Twin head reach the nominal position earlier, Overshot
control needs 11ms longer to trigger the end signal
(3) Overshot is higher than ’allowed deviation of position’ at the Twin head--> end signal delayed