SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第196页
1 - 30 S tudent Guide SIPLACE HF/HF3 5 Gantry Edition 09/2005 30 Please Note: The allowed deviation of position at the C&P head is 10µm and at the twin head 5µm. Fig. 5.5 - 7 Dynamic Signals at 20000 digit distance o…
1 - 29
Student Guide SIPLACE HF/HF3
Edition 09/2005 5 Gantry
29
5.5.3.1 Test setup
Please Note:
The test setup for the Y-Axis is the same as the X-Axis. 5
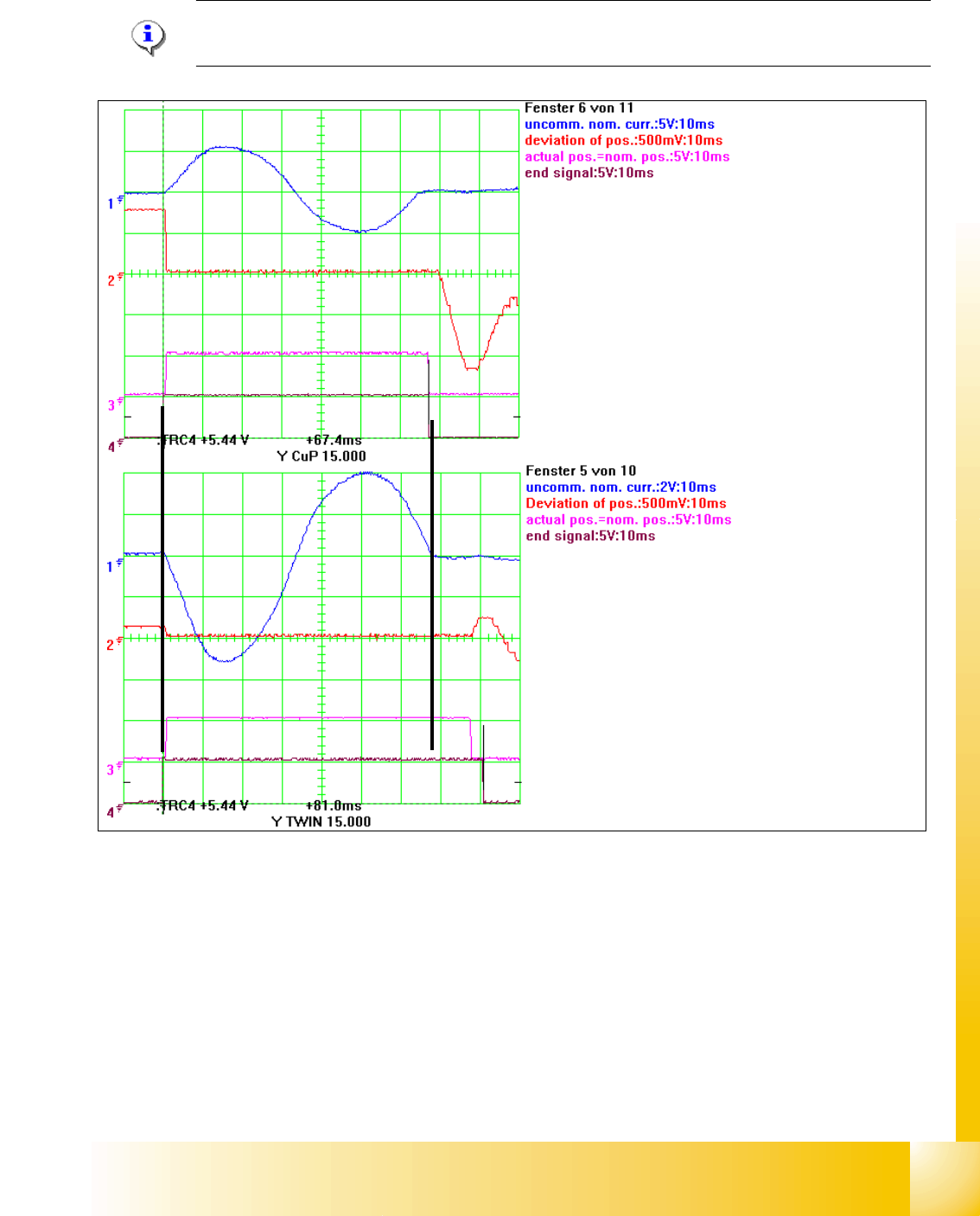
Fig. 5.5 - 6 Dynamic Signals at 15000 digit distance of Y-Axis C&P head on top and Twin head at bottom
Legend
3
2
1
(1) Start of the axis (2) Twin head reach the nominal position later,
(3) Overshot is smaller than the ’allowed deviation of posi-
tion at the Twin head--> end signal only a little delayed
1 - 30
Student Guide SIPLACE HF/HF3
5 Gantry Edition 09/2005
30
Please Note:
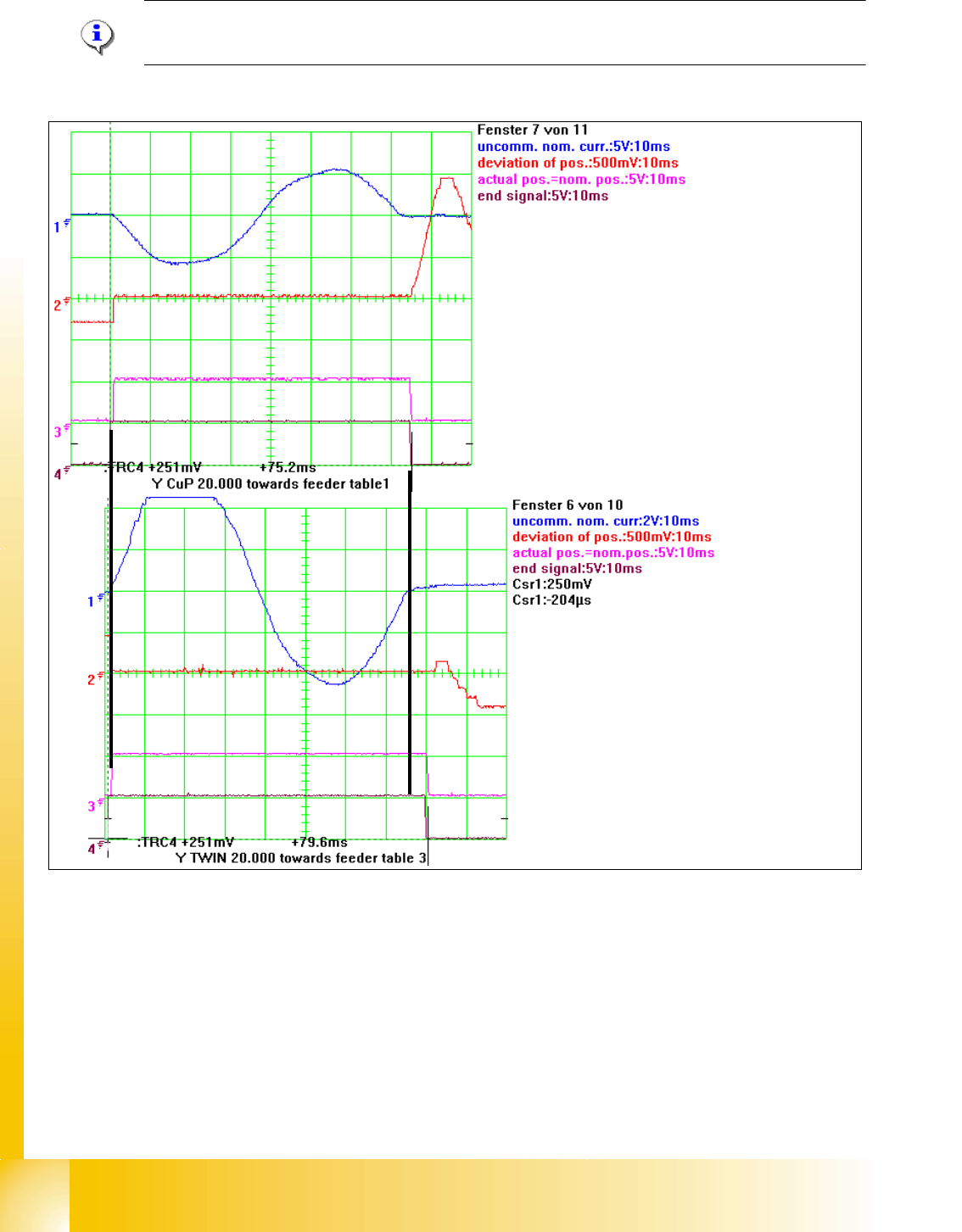
The allowed deviation of position at the C&P head is 10µm and at the twin head 5µm.
Fig. 5.5 - 7 Dynamic Signals at 20000 digit distance of Y-Axis C&P head on top and Twin head at bottom
Legend
3
2
1
(1) Start of the axis (2) Twin head reach the nominal position a little later,
Overshot control don‘t happen.
(3) actual pos. is nominal position signal and end signal at the same time following overshots smaller than
the allowed dev. of pos.
Student Guide SIPLACE HF/HF3
Edition 09/2005 Contents
1
Chapter
Table of Contents
6 Collect &Place-Head / DLM2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
6.1 Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
6.1.1 Technical Data 6/12 DLM2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
6.1.1.1 Technical Data: 6 Segment / 12 Segment C&P heads. . . . . . . . . . . . . . . . . . . . . 3
6.1.1.2 Camera modularity at the 6segment C&P head for example. . . . . . . . . . . . . . . . 3
6.1.2 Steps when picking up and placing components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
6.1.3 Position and function of the individual star stations. . . . . . . . . . . . . . . . . . . . . . . . . . . 4
6.1.4 Overview parts on the 12 Segment C&P head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
6.1.5 Pressure air supply DLM 2 C&P head. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.1.5.1 Vacuum generator DLM 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.1.6 Overview air kiss supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6.1.7 Overview vacuum supply. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6.2 Reference Run . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
6.2.1 Reference run C&P head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6.2.2 Initialize Valve Drive at Pick-up / Placement Position / Reject Position . . . . . . . . . . 15
6.2.3 Initialize Valve Drive at Reject Position which is not use on HF machine. . . . . . . . . 16
6.2.4 Initialize Valve Drive at DP-station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6.2.5 Preparing Z-axis Reference Run. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.2.6 Reference Run at Star-Axis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.2.7 Completion of the Z-axis Reference Run . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.2.8 Reference Run at Dp-axis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.2.9 Pollution and Components are Rejected / Nozzles Turned to 0° . . . . . . . . . . . . . . . 21
6.2.10 Height reference run . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.3 Placement sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.3.1 Working positions at the placement head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.3.2 12 nozzle Collect & Place head in home position 15°. . . . . . . . . . . . . . . . . . . . . . . . 24
6.3.3 PCB position recognition run to the PCB nominal position . . . . . . . . . . . . . . . . . . . . 24
6.3.4 PCB position recognition centering of the PCB fiducials. . . . . . . . . . . . . . . . . . . . . . 25
6.3.5 Turn nozzle 1 to Pick up angle (0° or 90°). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.3.6 Check nozzle length for component recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.3.7 Pick up first Component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.3.8 Pick up 6th component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.3.9 Pick up 7th component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6.3.10 Pick up 8th component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6.3.11 Pick up 9th Component. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.3.12 Component recognition at the 1st Segment in Component Sensor . . . . . . . . . . . . 29
6.3.13 Pick up 12th component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30