SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第84页
1 - 14 S tudent Guide SIPLACE HF/HF3 3 Communication and Control Edition 09/2005 14 Arbitration: st ate of matter diagram 3 Fig. 3.3 - 9 flow chart bus arbitration There are two bus states, called ’dom inant’ and ’recess…
1 - 13
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
13
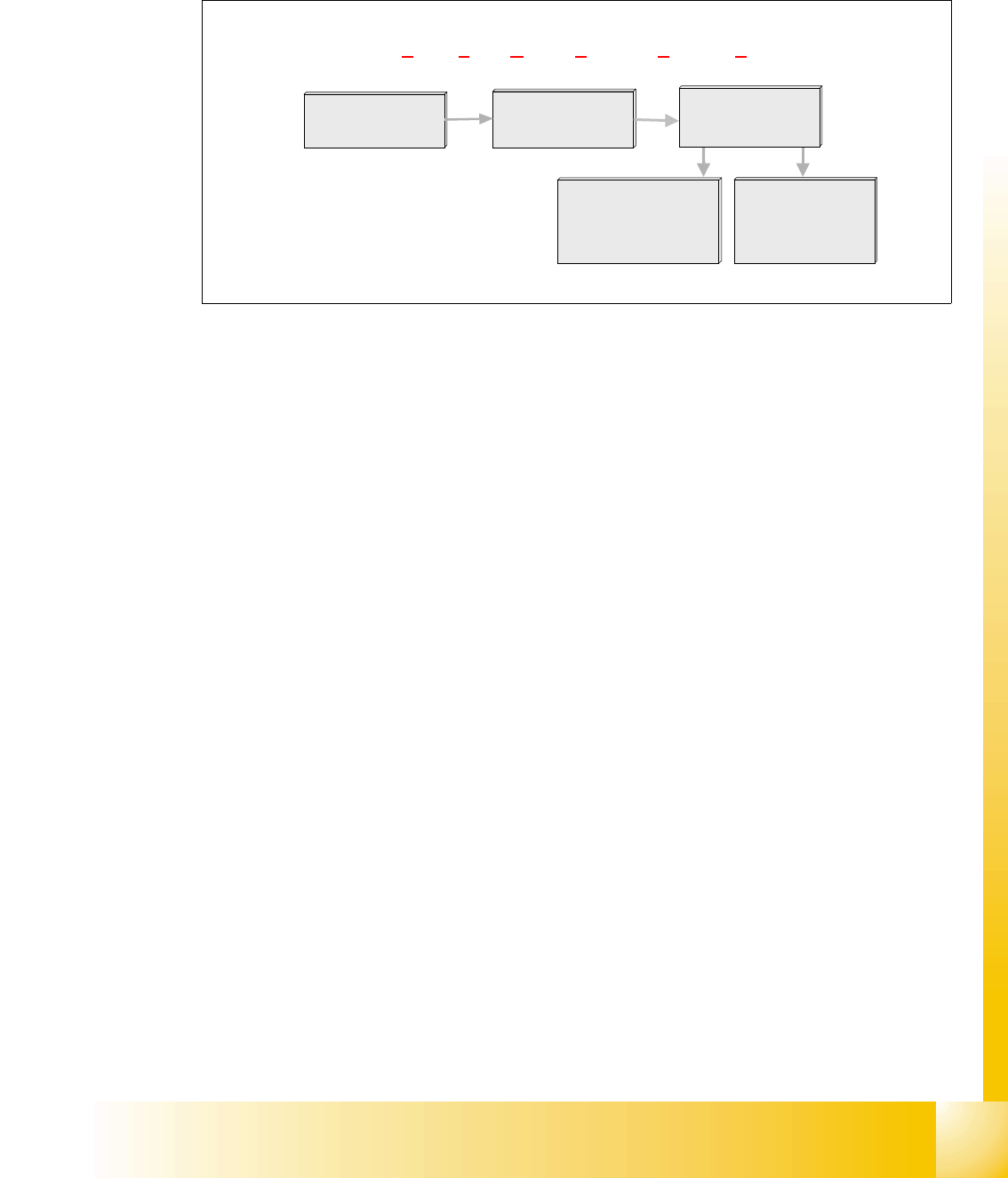
3.3.2.3 CSMA: Collusion Detectection
When the bus is free any unit may start to transmit a message. The unit with the message of the
highest priority is at first.
h
Fig. 3.3 - 8 CSMA: collusion detection
3.3.2.4 CAN Bus Arbitration
In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but
instead, prioritized messages are transmitted. A transmitter sends a message to all CAN nodes
(broadcasting). Each node decide on the basis of the identifier received whether it should process
the message or not. The identifier determines the priority that the message enjoys in competition
for bus access. The relatively simplicity of the CAN chips interlaces make applications program-
ming relatively simply.
Whenever the bus is free, any unit may start to transmit a message. If 2 or more units start trans-
mitting messages at the same time, the bus access conflict is resolved by bitwise arbitration using
IDENTIFIER.
The mechanism of arbitration guarantees that neither information nor time is lost. A DATA FRAME
prevails over the REMOTE FRAME. During arbitration every transmitter compares the level of the
bit transmitted with the level that is monitored on the bus. If these levels are equal the unit may
continue to send. When a recessive level is sent and a dominant level is monitored, the unit has
lost arbitration and must withdraw without sending one more bit.
Multi master:
When the bus is free any unit may start to transmit a message. The unit with the message of the
highest priority is transmitted at first.
bus access
low waiting time
for high prioritized
telegrams
CSMA / CD: Carrier Sense Multiple Access by Collusion Detection
in case of collusion,
the members with
the lower priority
start again later
Carrier Sense
Multiple Access
(CSMA)
ollision
C
Detection
(CD)
1 - 14
Student Guide SIPLACE HF/HF3
3 Communication and Control Edition 09/2005
14
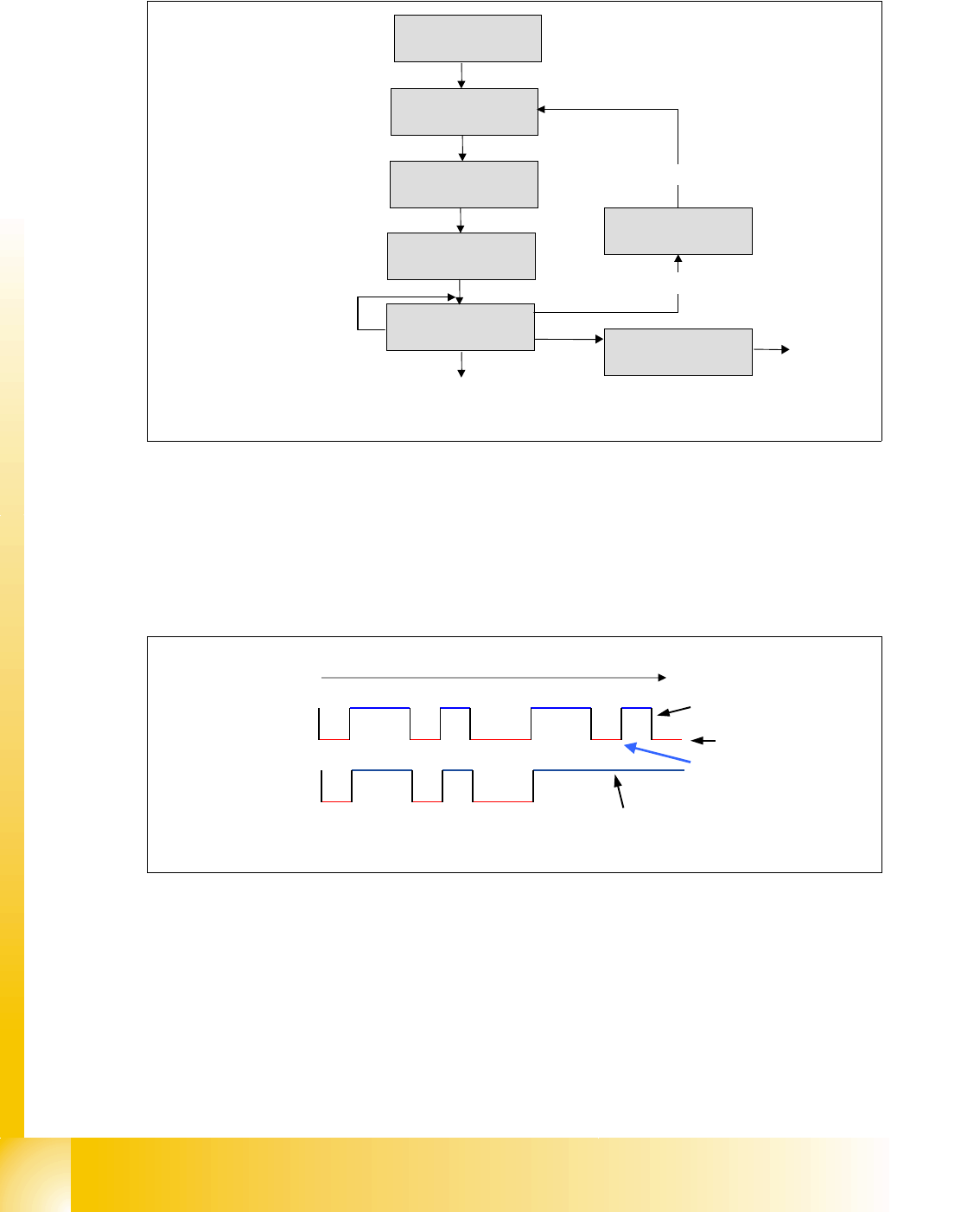
Arbitration: state of matter diagram 3
Fig. 3.3 - 9 flow chart bus arbitration
There are two bus states, called ’dominant’ and ’recessive’. The bus logic uses a ’Wired-AND’
mechanism, that is,
’dominant bits’ (equivalent to the logic level ’zero’) overwrite the ’recessive
bits’
(equivalent to the logic level ’one’).
Example: Arbitration with bit by bit detection of 2 member.
3
Fig. 3.3 - 10 CAN- bus arbitration with 2 member
waiting if bus is free
bit SoF
bus in receiving state
1st bit of arbitration
transmitted
compare transmitted bit
level with bus level
bus in error state
arbitration lost?
recessive bit on dominant bus state
all arbitration bits are transmitted,
send control field and data field
next bits
START: Any member
will send a message
11 10 9 8 7 6 5 4 3 2 1 0
recessive (logical high)
dominant (logical low)
member 1 wins arbitration here
member 2 looses arbitration here
and switch in receiving state
identifier member 1 1
Bit
identifier member 2 2
1 - 15
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
15
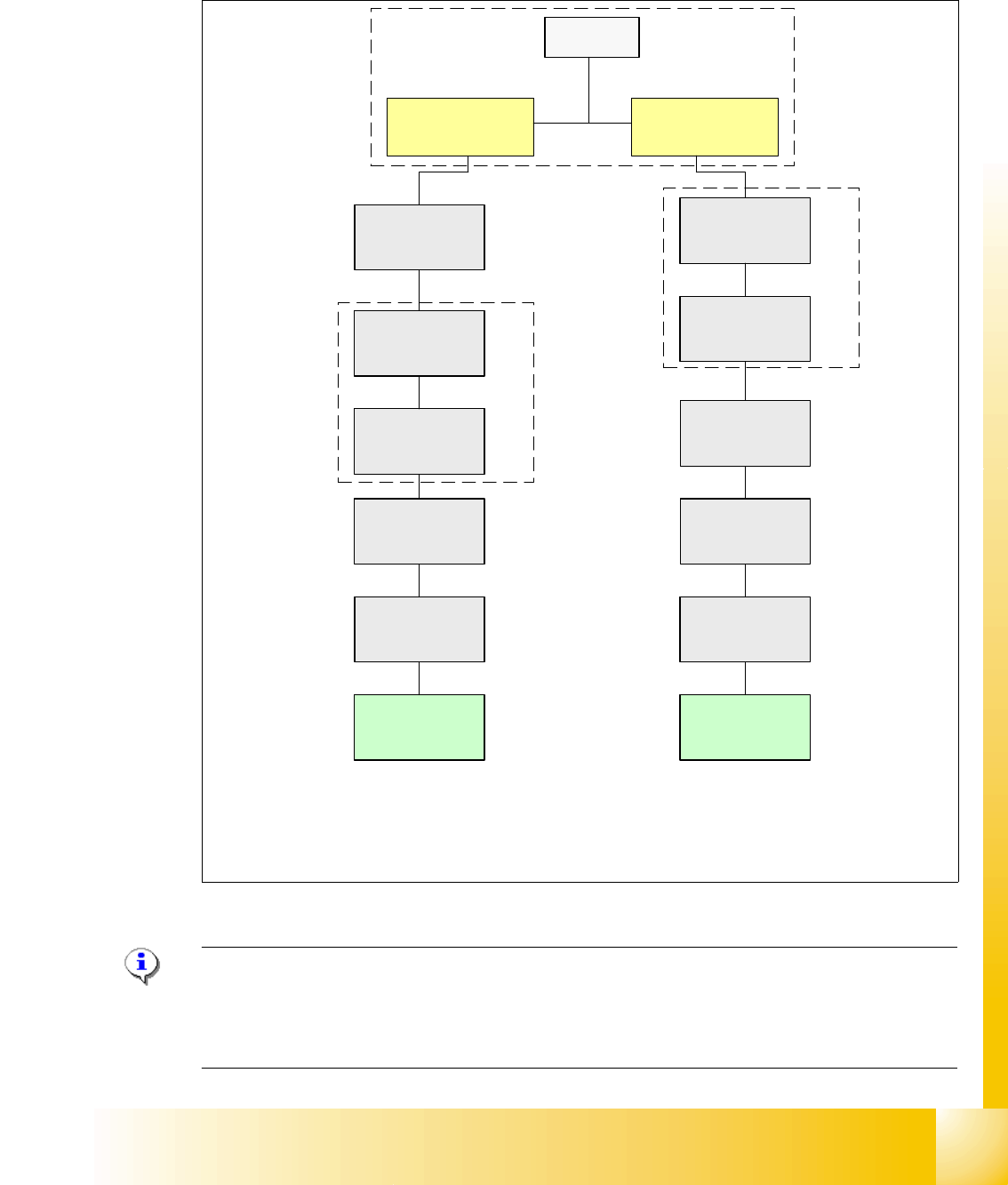
3.3.3 CAN Bus Concept on HF machine(up to MA.No. xx)
The placement machine SIPLACE HF uses a bus system with 1 Mbit/s transmission rate.The
CAN: Bus system begin at the Communication board and is split in 2 path. Every path is termi-
nated by a 120 ohm terminator on the CAN Bus board at the individual placement head.
Fig. 3.3 - 11 CAN Bus overall overview (new circuit diagrams)
Please Note: At SC/MC 505 update the gantry2 name change to gantry 3!!
The CAN- Wiring is changed that the cable went from COT3 to Gantry 3 and from Transport con-
trol to Gantry 1!! The CAN-Bus system is splited to 2 CAN-systems mean the second connector
at COMboard 1 is connected to COM 2!!
SMP BUS
MC
MC
Trailing cable-
Interface
Gantry 1
Trailing cable-
Interface
Gantry 2 *
CAN Bus cable 2
COT 3
Tape cutter
CAN Bus cable 1
Computer Unit
* SW Update 504 --> 505 Gantry 2 will be changed to gantry 3
old cable loop!
new circuit diagram!
Transport
Control
unit
COT 1
Tape cutter
Axis unit
PA 2
Vision
Section 2
CAN I/O
Main Module
Main Distributer Sektor 4
Control unit
Section 2
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN I/O
SUB Module
Section 4
Vision
Control unit
SUB Distributor Section 4
Section 4
COT 2 / MTC
Tape cutter
COT 4 / MTC
Tape cutter
COM Unit
(left)
COM Unit
(right)