RV-2_使用说明书 - 第346页
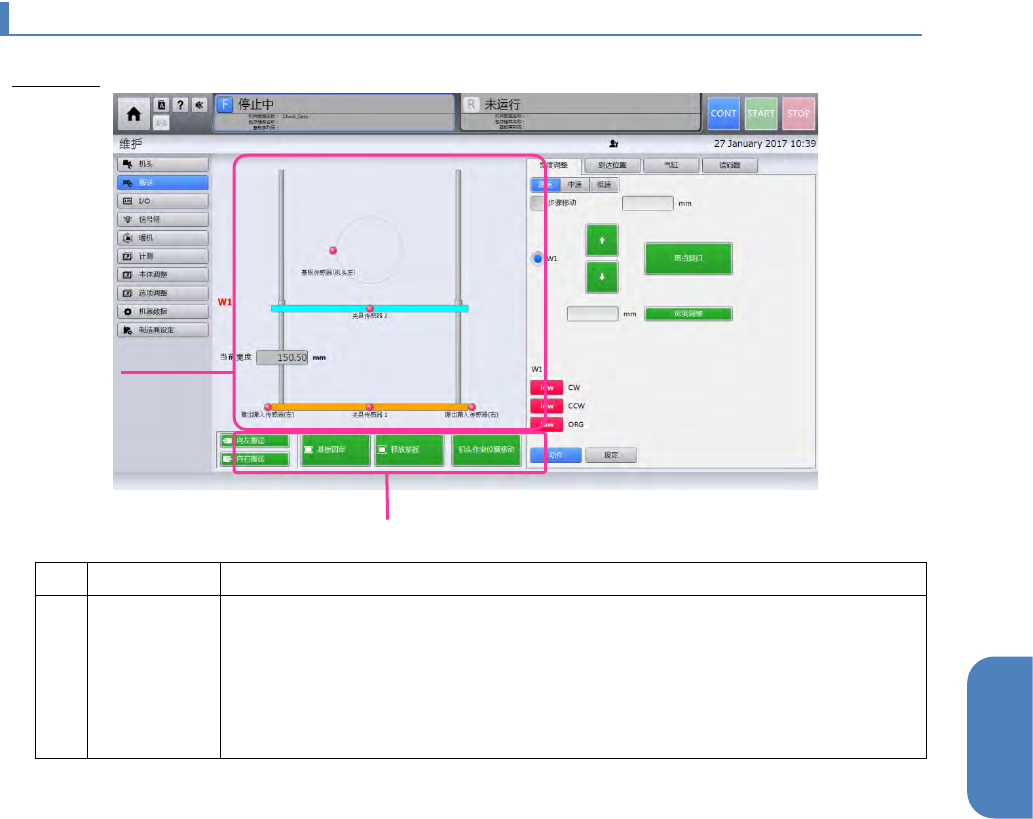
第 4 章 操作 篇 4- 8. 维护 266 宽度调整 (a) 宽度调整动作 可以操作轨道宽度。 (b) 传感器输出 显示各传感器的状态。 a b
第 4 章 操作篇
4-8. 维护
265
4
4-8-4.
搬送维护
通用功能
(a)
状态
可以确认基板搬送轨道的当前位置,当前宽度的显示,各传感器状态的画面。
(b)
向左搬送
向右搬送
基板固定
释放基板
机头作业位
置移动
触摸各按钮后,可以进行向左搬送
,
向右搬送
,
基板搬入
,
基板固定
,
基板释放
,
机头作业位置移动。
a
b

第 4 章 操作篇
4-8. 维护
266
宽度调整
(a)
宽度调整动作
可以操作轨道宽度。
(b)
传感器输出
显示各传感器的状态。
a
b
第 4 章 操作篇
4-8. 维护
267
4
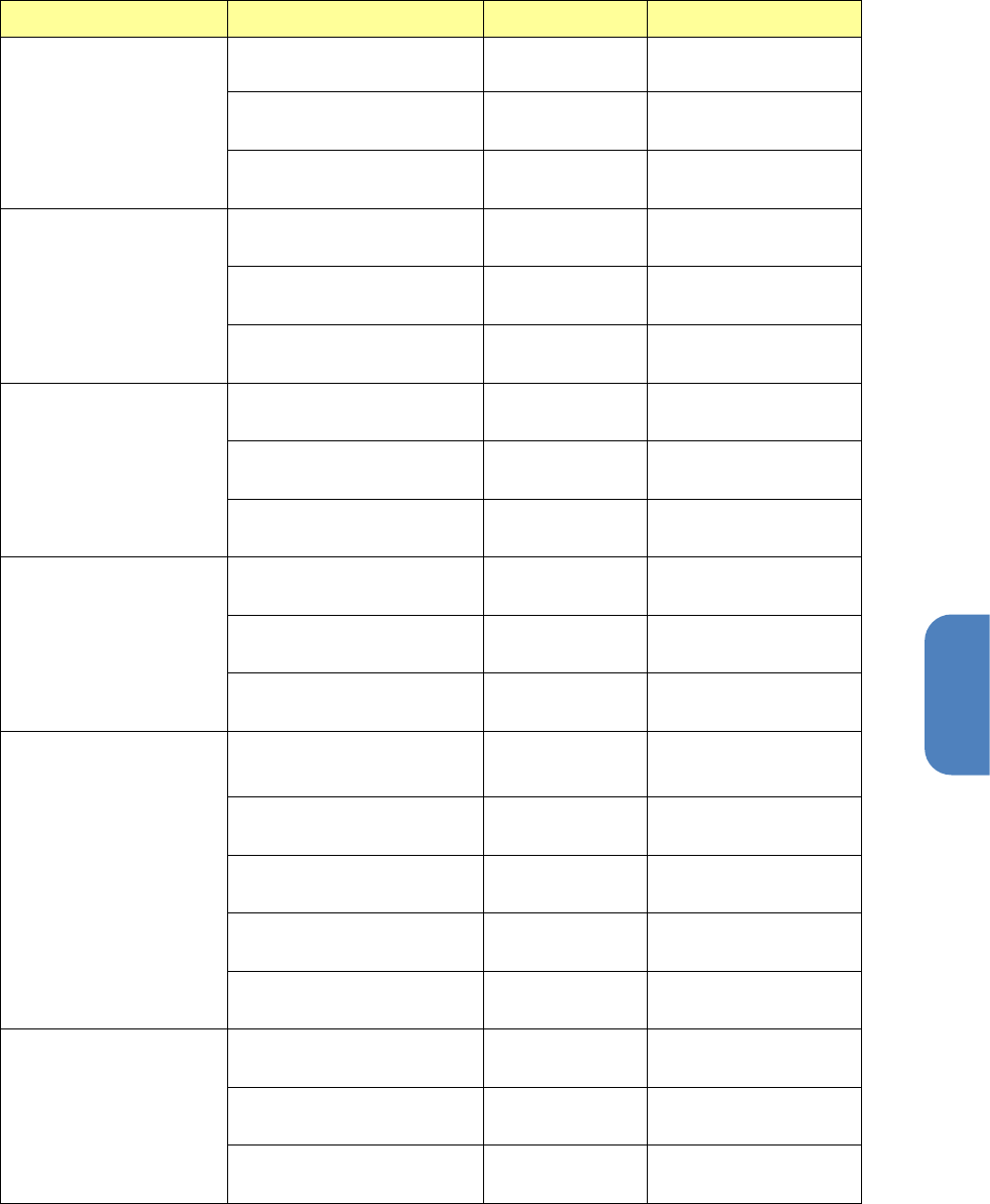
设定
分类
详细、单位
初始值
输入范围、项目
设定调整宽度时的速度
速度
W1 [mm/s]
30
1
至
999
(整数)
加速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
减速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
微动高速移动时的速度
设定
速度
W1 [mm/s]
20.000
0.000
至
99.999
(小数点后
3
位)
加速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
减速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
微动中速移动时的速度
设定
速度
W1 [mm/s]
5.000
0.000
至
99.999
(小数点后
3
位)
加速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
减速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
微动低速移动时的速度
设定
速度
W1 [mm/s]
0.500
0.000
至
99.999
(小数点后
3
位)
加速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
减速度
W1 [mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
原点复归设定
原点复归速度
W1 [mm/s]
30.000
0.000
至
99.999
(小数点后
3
位)
原点复归加速度
W1
[mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
原点复归减速度
W1
[mm/s
2
]
50.000
0.000
至
99.999
(小数点后
3
位)
原点复归近点速度
W1
[mm/s
2
]
3.000
0.000
至
99.999
(小数点后
3
位)
原点位置
W1 [mm]
369.000
-999.999
至
999.999
(小数点后
3
位)
设定高速搬送时的速度
速度
Front [mm/s]
460.000
0.000
至
999.999
(小
数点后
3
位)
加速度
Front [mm/s
2
]
125.000
0.000
至
9999.999
(小数点后
3
位)
减速度
Front [mm/s
2
]
400.000
0.000
至
9999.999
(小数点后
3
位)