RV-2_使用说明书 - 第350页
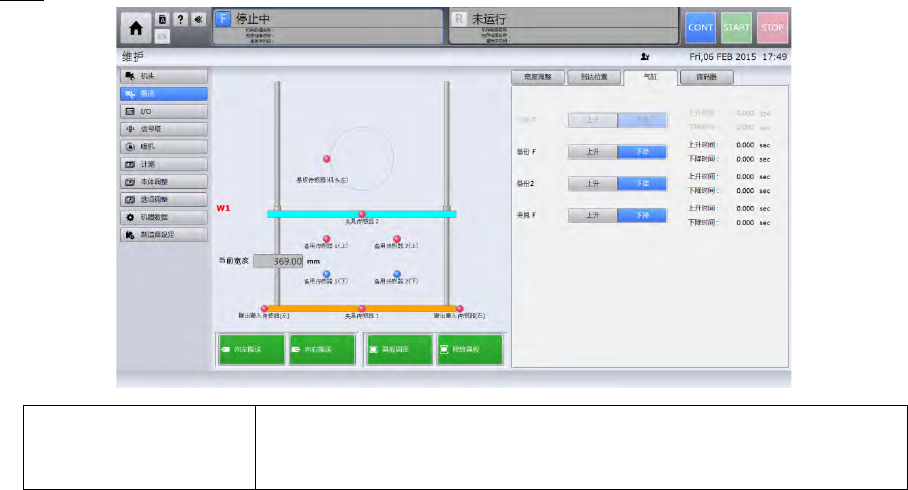
第 4 章 操作 篇 4- 8. 维护 270 汽缸 挡块 支撑 夹具固定 • 触摸[上升],[下降 ] 后, 对应的轴开始动作。 • 将同时测量和显示上升 时间,下降 时间 。
第 4 章 操作篇
4-8. 维护
269
4
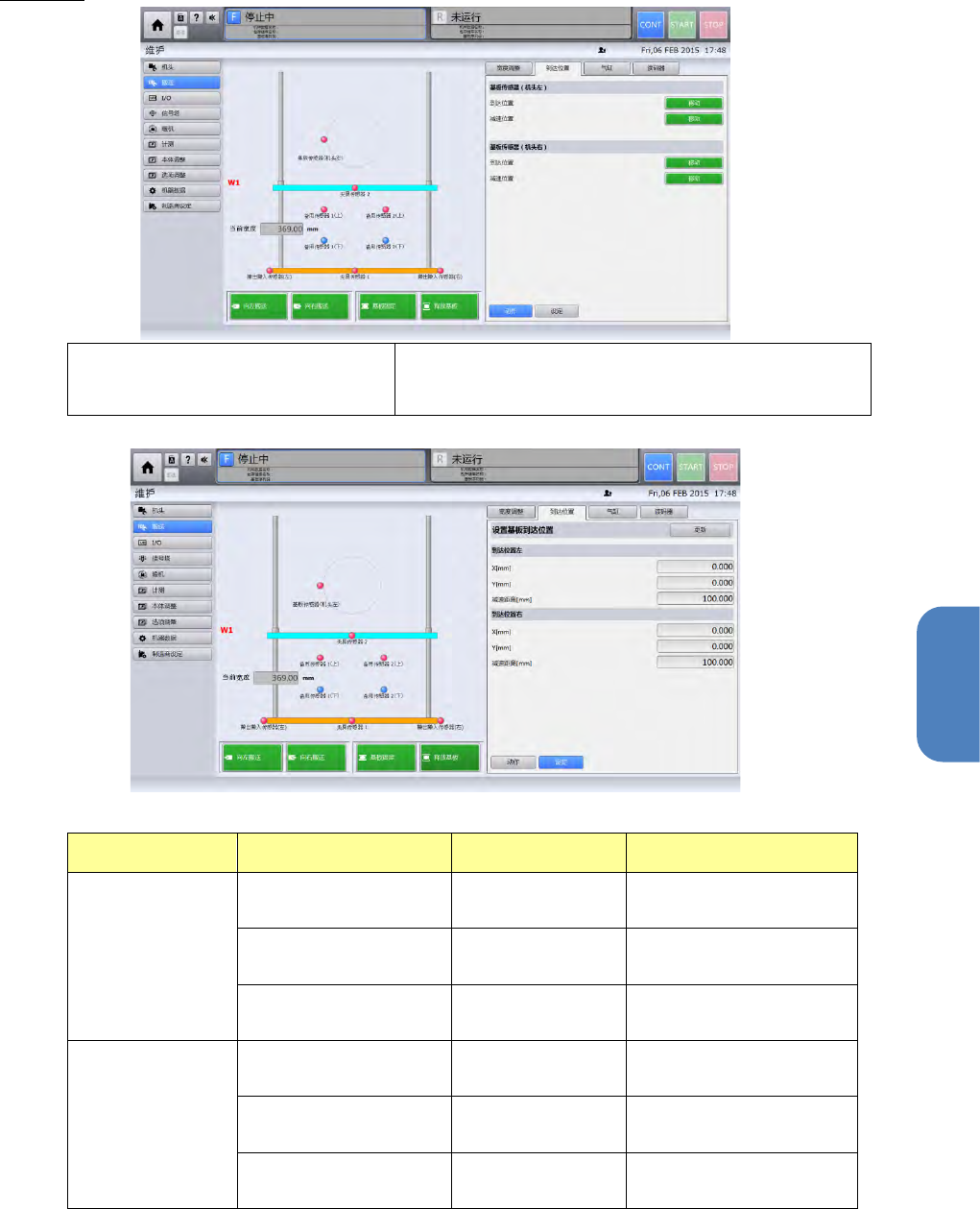
到达位置
基板传感器(
Head
右)
基板传感器(
Head
左)
•
触摸[移动至到达位置]、[移动至减速位
置],将基板传感器移动到指定的位置。
设定
分类
详细
・
单位
初始值
输入范围
・
项目
到达位置左
X[mm]
0.000
0.000
~
999.999
(小数点以下
3
位)
Y[mm]
25.000
0.000
~
999.999
(小数点以下
3
位)
减速距离
[mm]
50.000
0.000
~
999.999
(小数点以下
3
位)
到达位置右
X[mm]
400.000
0.000
~
999.999
(小数点以下
3
位)
Y[mm]
25.000
0.000
~
999.999
(小数点以下
3
位)
减速距离
[mm]
50.000
0.000
~
999.999
(小数点以下
3
位)
第 4 章 操作篇
4-8. 维护
270
汽缸
挡块
支撑
夹具固定
•
触摸[上升],[下降]后,对应的轴开始动作。
•
将同时测量和显示上升时间,下降时间。
第 4 章 操作篇
4-8. 维护
271
4
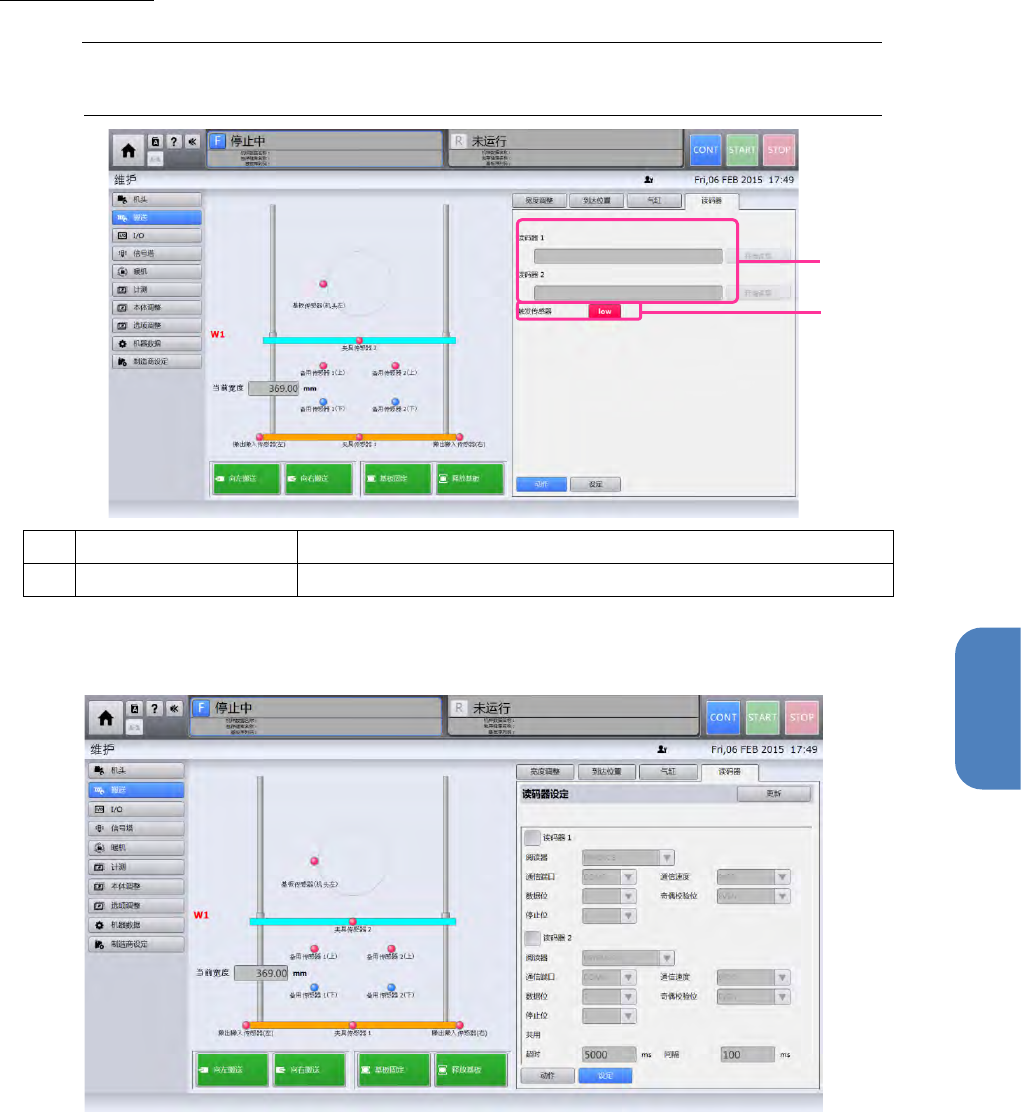
读码器(选配)
Tips
•
序列码读码器为选配件,未选择配件时不显示。
(a)
读码器
1
、读码器
2
显示读入序列码读码器的字符串。
(b)
触发传感器
显示传感器状态。
使用前部和后部装有的条形码读取器可以读取条形码。触摸[开始读取]后读入条形码。
a
b