RV-2_使用说明书 - 第353页
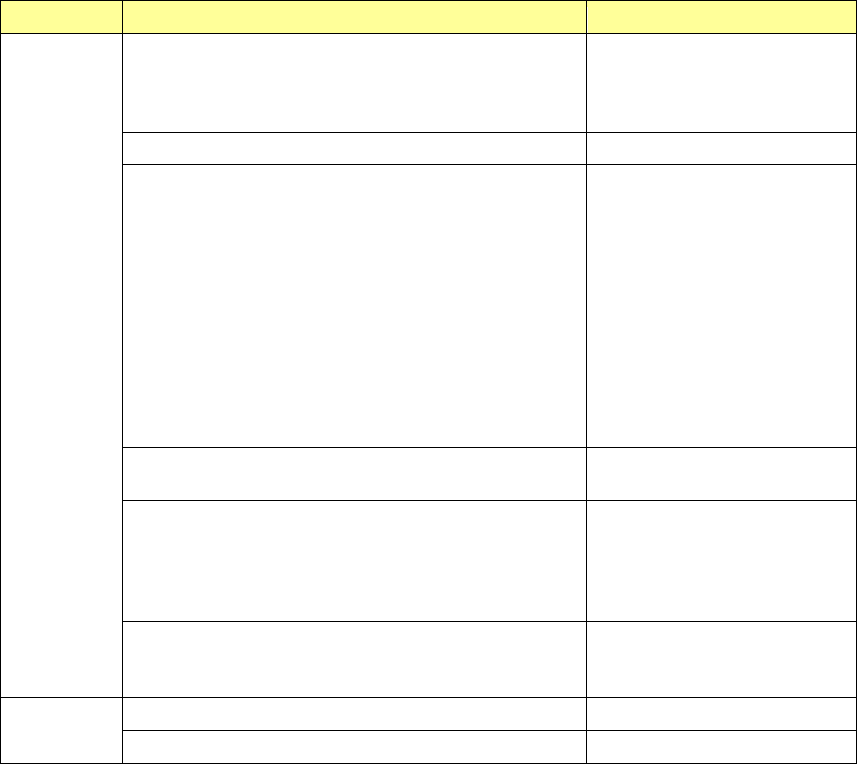
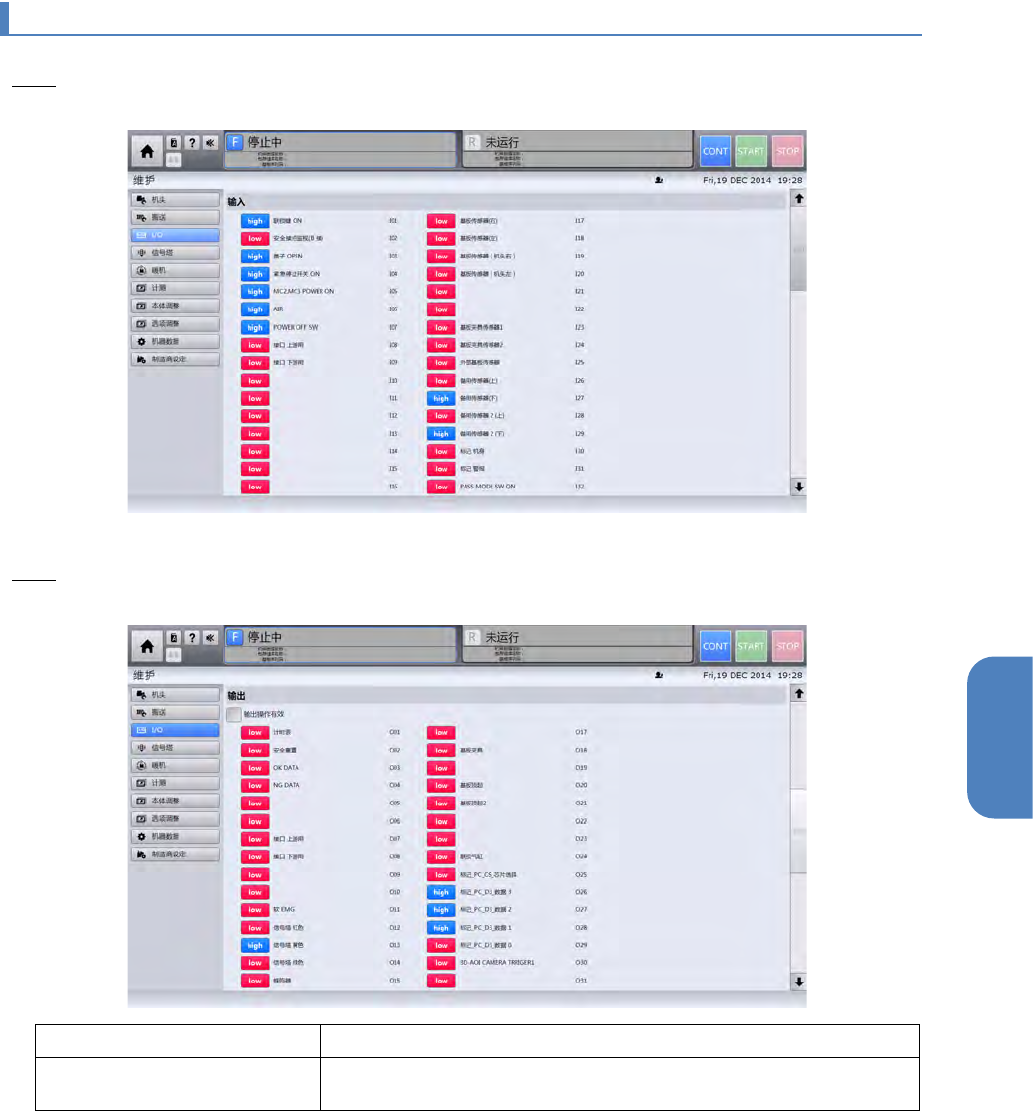
第 4 章 操作 篇 4- 8. 维护 273 4 4-8- 5. I/O 维护 输入 可确认设备输入信号的 状态。 输出 可确认和操作 设备 的输出信号。 输出操作有效 勾选后可操作。 high low 触摸按 钮进 行输出动 作。
第 4 章 操作篇
4-8. 维护
272
设定
分类
更多信息
输入范围、项目
前通道
阅读器
Handy
KEYENCE
Martrix2000
DATAMAN
通信端口
COM1
~
13
通信速度
600
1200
2400
4800
9600
14400
19200
38400
57600
115200
128000
256000
数据位
8
7
奇偶校验位
none
odd
even
mark
space
停止位
1
1.5
2
共用
超时
0
至
30000
(整数)
ms
间隔
0
至
30000
(整数)
ms
第 4 章 操作篇
4-8. 维护
273
4
4-8-5. I/O
维护
输入
可确认设备输入信号的状态。
输出
可确认和操作设备的输出信号。
输出操作有效
勾选后可操作。
high
low
触摸按钮进行输出动作。
第 4 章 操作篇
4-8. 维护
274
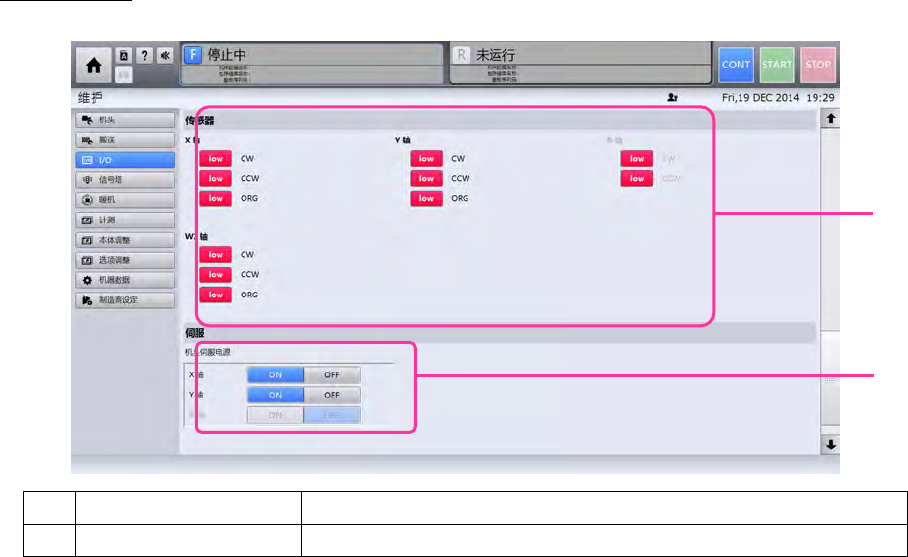
传感器、伺服
(a)
传感器
显示各轴的界限传感器,原点传感器的信息(状态)。
(b)
机头伺服电源
可以将
XY
轴输送带伺服的电源设为[
ON
]、[
OFF
]。
a
b