00197910-03_UM_X-Serie-S_PL - 第148页
3 Dane techniczne i zespo ł y Instrukcja eksploatacji SIPLACE seria X 3.5 G ł owica monta ż owa Od wersji oprogramowania 710.0 Wydanie 12/2016 148 3.5.6.1 Opis G ł owica MultiS tar stanowi po łą czenie dwóc h przeciwstaw…
Instrukcja eksploatacji SIPLACE seria X 3 Dane techniczne i zespoły
Od wersji oprogramowania 710.0 Wydanie 12/2016 3.5 Głowica montażowa
147
3
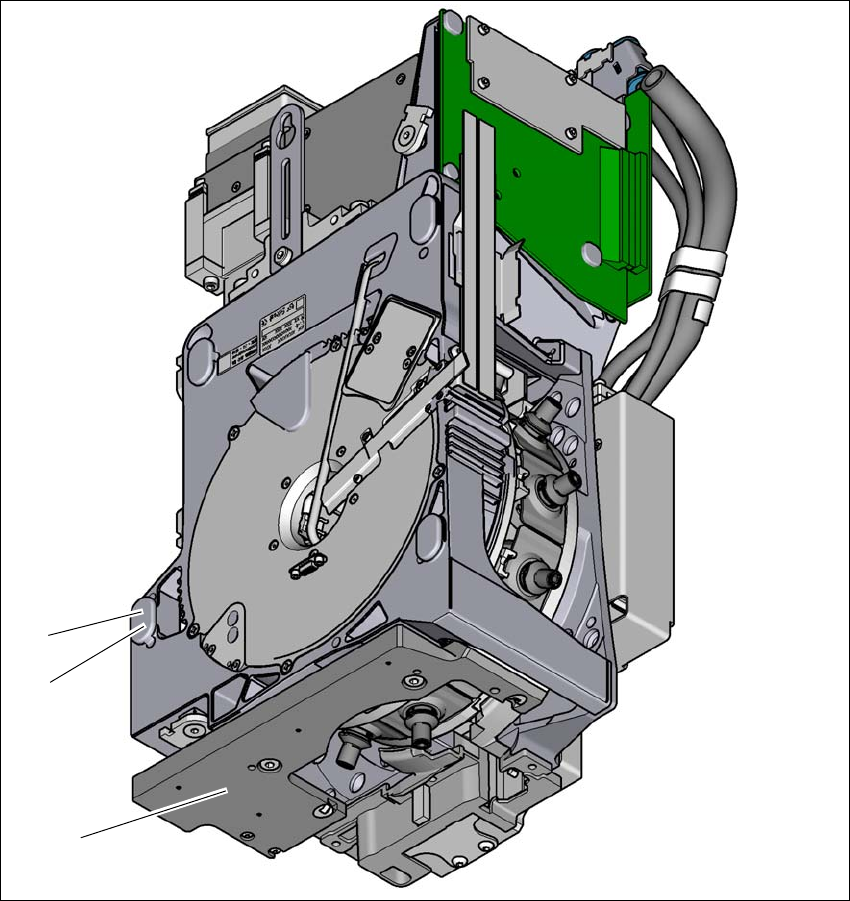
Rys. 3.5 - 9 SIPLACE MultiStar - widok z przodu, zespoły funkcjonalne część 3
(1) Czujnik podzespołów
(2) Pozycja montażowa do wysokości podzespołów do 11,5 mm
(3) Pozycja montażowa do wysokości podzespołów do 6 mm
(3)
(2)
(1)
3 Dane techniczne i zespoły Instrukcja eksploatacji SIPLACE seria X
3.5 Głowica montażowa Od wersji oprogramowania 710.0 Wydanie 12/2016
148
3.5.6.1 Opis
Głowica MultiStar stanowi połączenie dwóch przeciwstawnych właściwości: wysokiej wydajności
uzbrajania z elastycznością. W przypadku małych podzespołów, do 27 mm x 27 mm, MultiStar
pracuje metodą Collect&Place, tzn. z wysoką wydajnością montażu. W tym celu podzespoły są
centrowane za pomocą zintegrowanej kamery podzespołów. W przypadku dużych podzespołów,
do 50 mm x 40 mm, głowica montażowa pracuje metodą Pick&Place, przy czym podzespoły są
optycznie centrowane kamerą stacjonarną.
MultiStar otrzymała swoją nazwę z połączenia obu metod montażu C&P i P&P. Jest ona nazy-
wana w skrócie głowicą CPP.
12 segmentów głowicy CPP jest rozmieszczone w układzie gwiazdy. Silnik momentowy o wyso-
kim momencie obrotowym obraca gwiazdę wokół osi poziomej, osi gwiazdowej.
Każdy segment ma własny nap
ęd DP do obracania pipety. Dzięki temu pipety nie muszą być ob-
racane do prawidłowej pozycji tylko na jednej stacji głowicy. Mogą być w każdej chwili i niezależnie
od siebie obracane do pozycji uzbrajania.
Każdy segment posiada własną wytwornicę próżni. Dzięki temu udało się znacznie skrócić czas
przełączania między próżnią i nadmuchem. Poza tym w układzie trzymania może być wykony-
wana kontrola próżniowa każdej indywidualnej pipety.
Napęd osi Z segmentów jest wykonany w postaci silnika liniowego z liniowym układem pomiaru
położenia, dzięki czemu jest niezwykle precyzyjny. W pozycji odbioru/uzbrajania napęd osi Z
przesuwa segmenty do dołu lub do góry w osi pionowej.
Jak we wszystkich głowicach SIPLACE Collect&Place w głowicy zintegrowana jest cyfrowa ka-
mera podzespołów. Brak dodatkowych przesuwów do wycentrowania optycznego przyczynia się
do uzyskania wysokiej prędkości przetwarzania.
Czujnik podzespołów na spodzie gł
owicy uzbrajającej mierzy podzespoły w pozycji odbioru/
uzbrajania. Dla każdego ruchu osi Z można wykonywać pomiary na czubku pipety i na tej podsta-
wie ocenić, czy w pipecie znajduje się podzespół i jaka jest jego wysokość.
3.5.6.2 Pozycje montażowe głowicy SIPLACE MultiStar
Głowica CPP może być montowana w uchwycie głowicy w dwóch różnych pozycjach:
– MultiStar w górnej pozycji montażowej
W tym położeniu można montować wszystkie podzespoły do wielkości 50 mm x 40 mm i wy-
sokości do 11,5 mm. 3
– MultiStar w dolnej pozycji montażowej
W tym położeniu głowica CPP montuje podzespół metodą Collect&Place do wielkości
27 mm x 27 mm, przy wysokości podzespołów 6 mm. 3
Instrukcja eksploatacji SIPLACE seria X 3 Dane techniczne i zespoły
Od wersji oprogramowania 710.0 Wydanie 12/2016 3.5 Głowica montażowa
149
Ustalając pozycję montażową, przestrzegaj następujących zasad:
Wysokość głowicy w określonej sekcji uzbrajania musi być identyczna dla wszystkich głowic
uzbrajających.
Instaluj głowicę CPP zawsze w górnej pozycji montażowej, gdy współpracuje ona z następu-
jącymi zespołami:
– Stacjonarna kamera podzespołów
– Zmieniacz Matrix Tray Changer
– TwinStar
3.5.6.3 Klasyfikacja obsługiwanego zakresu podzespołów
3
Klasa
podzespołu
Wielkość
podzespołu
Pozycja
montażowa
*a
głowicy CPP
Wysokość
podzespołu
Typ kamery
podzespołów
Mały podzespół
K_BE
01005-
27 mm x 27 mm
górna do 8,5 mm
kamera głowico-
wa, typ 30
dolna do 6,0 mm
Mały podzespół
K_BE
01005-
16 mmx16 mm
górna do 8,5 mm
kamera głowico-
wa, typ 38
dolna do 6,0 mm
średni podze-
spół, Typ
M_BE_1
< 27 x 27 mm
górna
między 8,5 i
11,5 mm
stacjonarna kame-
ra podzespołów,
typ 33
dolna niemożliwe
średni podze-
spół, Typ
M_BE_2
pomiędzy
27 mm x 27 mm
i
32 mm x 32 mm
górna 11,5 mm
dolna niemożliwe
Duży podzespół
G_BE
pomiędzy
32 mm x 32 mm
i 50 mm x 40 mm
górna do 11,5 mm stacjonarna kame-
ra podzespołów,
typ 33
dolna niemożliwe
Tab. 3.5 - 1Klasyfikacja obsługiwanego zakresu podzespołów
*)a Przestrzegać zasad wysokości pozycji montażowej, podanych w rozdziale 3.5.6.2
, strona 148.