OM-1356-003_w.pdf - 第58页
6-9 0704-002 [2] 助熔剂 ( 助焊剂 ) 涂敷数据 动作模式 设定 “ 动作模式 ” 。 外形识别 : 球体 + 外形→涂敷→外形 凸块识别 : 球体→涂敷→球体 • 外形识别模式 涂敷助焊剂后不能识别凸块时,使用该模式。 在涂敷助焊剂前进行凸块识别和外形识别,涂敷后再次进行外 形识别。 根据涂敷前后外形识别的位置关系,算出凸块位置进行贴装动 作。 5.贴装 2.元件识别 (凸块、外形) 4.元件识别(外形) 1.元件吸…
6-80802-003
6.2 元件数据库
进行对应于助焊剂涂敷单元的元件的设定。
在
“
元件数据库编辑
”
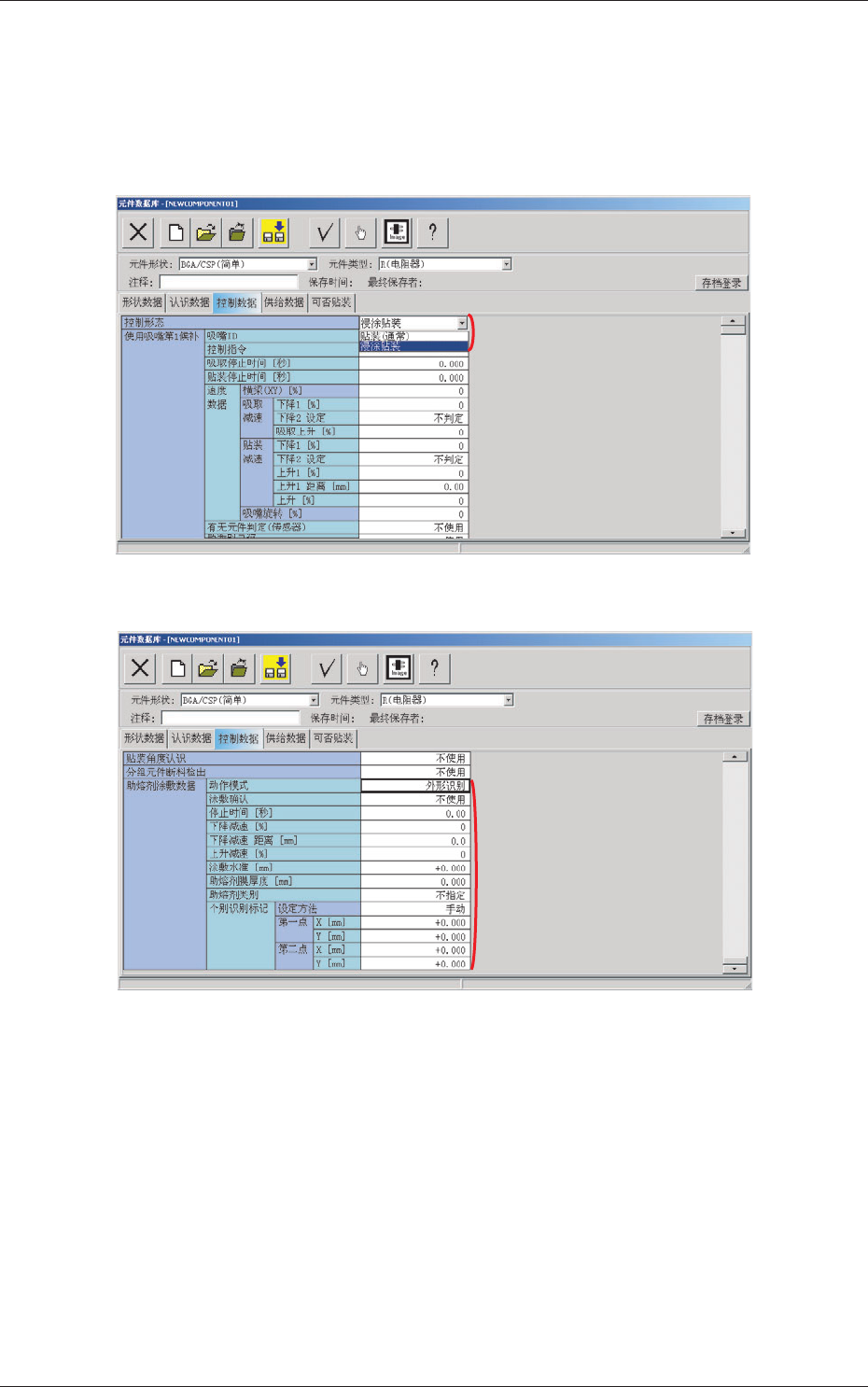
界面中,按 [ 控制数据 ]Tab,便显示
“
控制数
据
”
选项卡。
Fig.26
Fig.27
[1] 控制形态
从以下选择是否浸涂元件。
贴装 ( 通常 ) : 进行照常的元件贴装。
浸涂贴装 : 进行元件浸涂。
6.2 元件数据库
[1]
[2]
6-90704-002
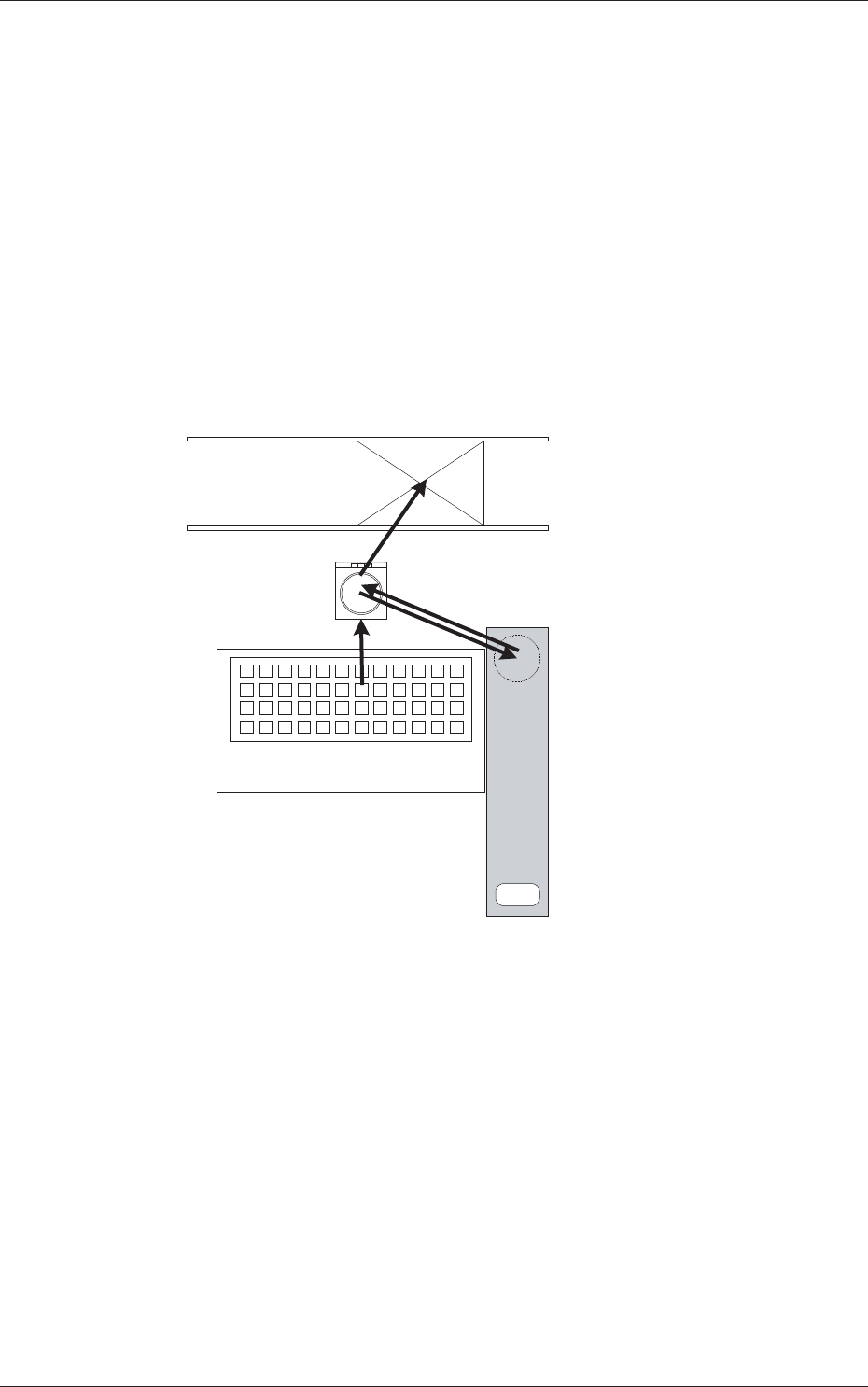
[2] 助熔剂 ( 助焊剂 ) 涂敷数据
动作模式
设定
“
动作模式
”
。
外形识别 : 球体 + 外形→涂敷→外形
凸块识别 : 球体→涂敷→球体
•
外形识别模式
涂敷助焊剂后不能识别凸块时,使用该模式。
在涂敷助焊剂前进行凸块识别和外形识别,涂敷后再次进行外
形识别。
根据涂敷前后外形识别的位置关系,算出凸块位置进行贴装动
作。
5.贴装
2.元件识别
(凸块、外形)
4.元件识别(外形)
1.元件吸取
多层盘式送料器
3.助焊剂涂敷
助焊剂涂敷装置
Fig.28
•
凸块识别模式
即使在涂敷助焊剂后也可以识别凸块时,使用该模式。
用
“
2. 元件识别 ( 凸块、外形 )
”
、
“
4. 元件识别 ( 外形 )
”
进行
各个凸块识别。
6.2 元件数据库
6-100704-002
涂敷确认
不使用、使用 (100%)、使用 (80%)、使用 (60%)
选择是否使用涂敷确认。
停止时间 [ 秒 ]
设定涂敷助焊剂时的下至点停止时间。
•
单位 : 秒
•
数据的设定范围 :0.00 ~ 1.00[ 秒 ]
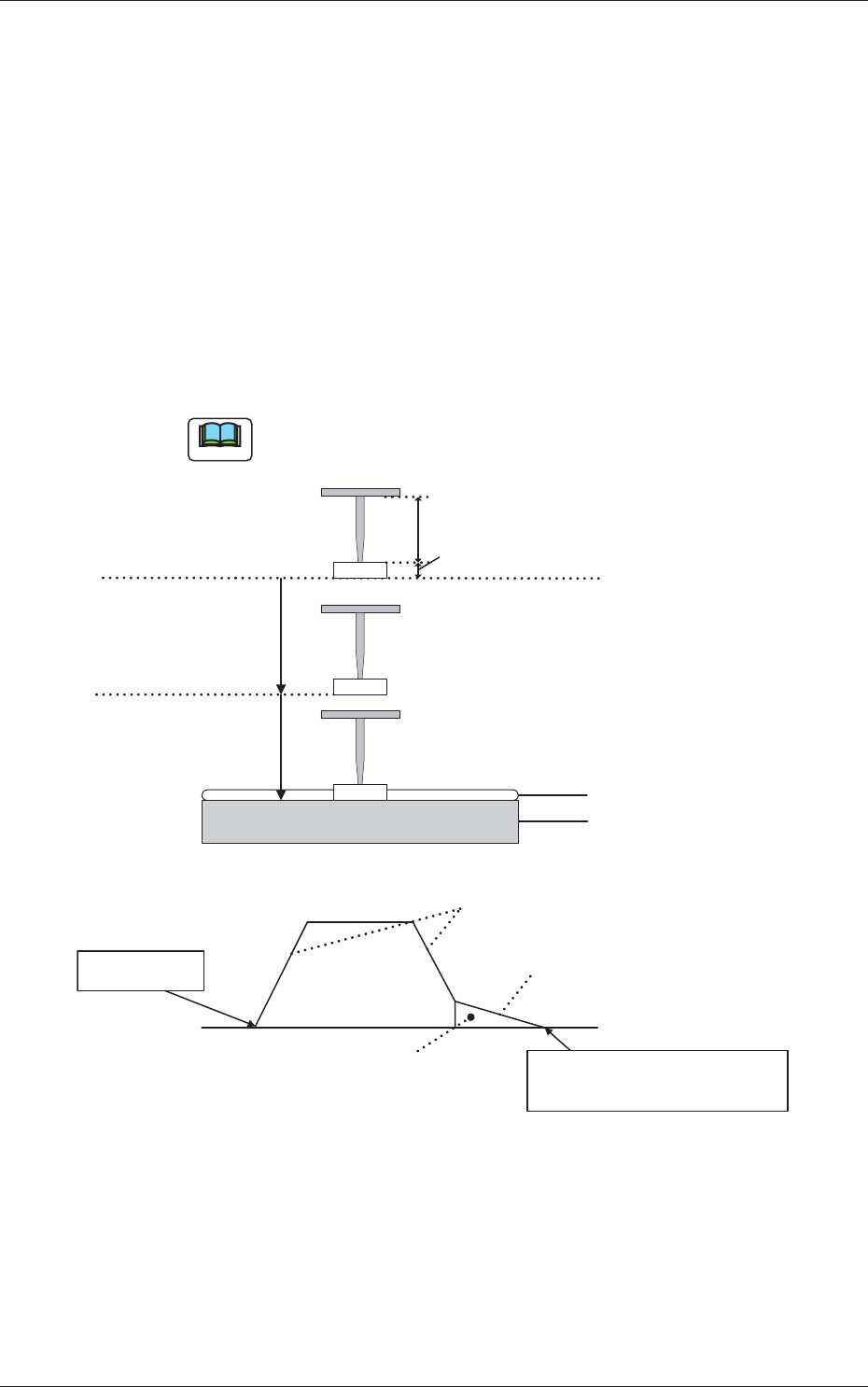
下降减速 [%]
设定 L 轴下降时第二层的减速值。
下图表示对于磁鼓涂敷面的 L 轴控制方式。
Note
L 轴下降时第一层的减速,适用
“
贴装减速 下降 [%]
”
。
上通过线
或
下通过线
吸嘴长度
元件厚度(t)
贴装减速 下降1[%]
助焊剂涂敷数据
下降减速[%]
助焊剂(膜厚度:数10
�m)
磁鼓(旋转盘)
贴装减速 下降1
助焊剂涂敷数据
下降减速
L轴下降开始
助焊剂涂敷数据
下降距离移动量
L轴定位完毕
磁鼓(旋转盘)设置面
Fig.29
6.2 元件数据库