ServiceManual_UR10_zh_3.2.6.pdf - 第26页
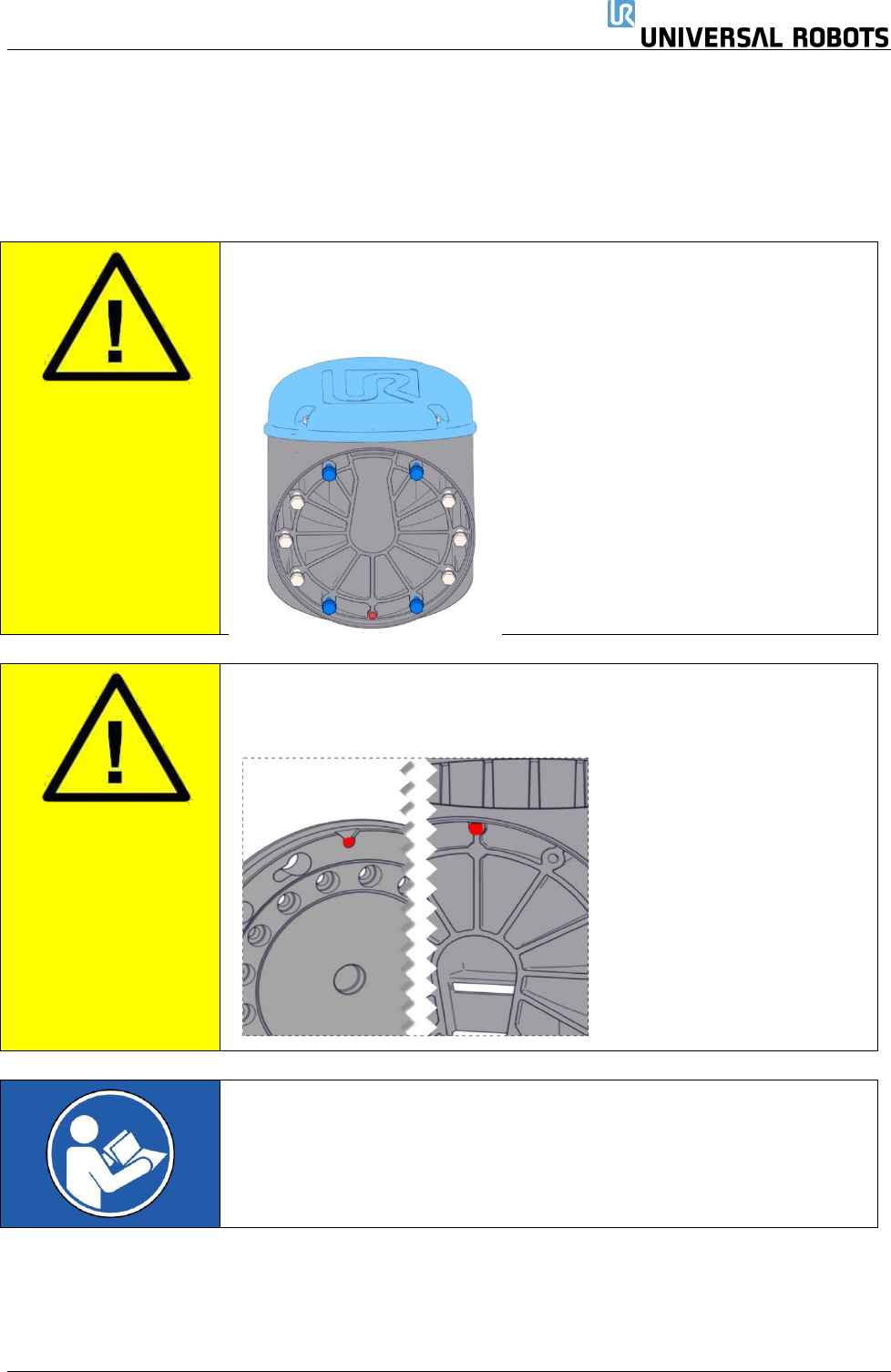
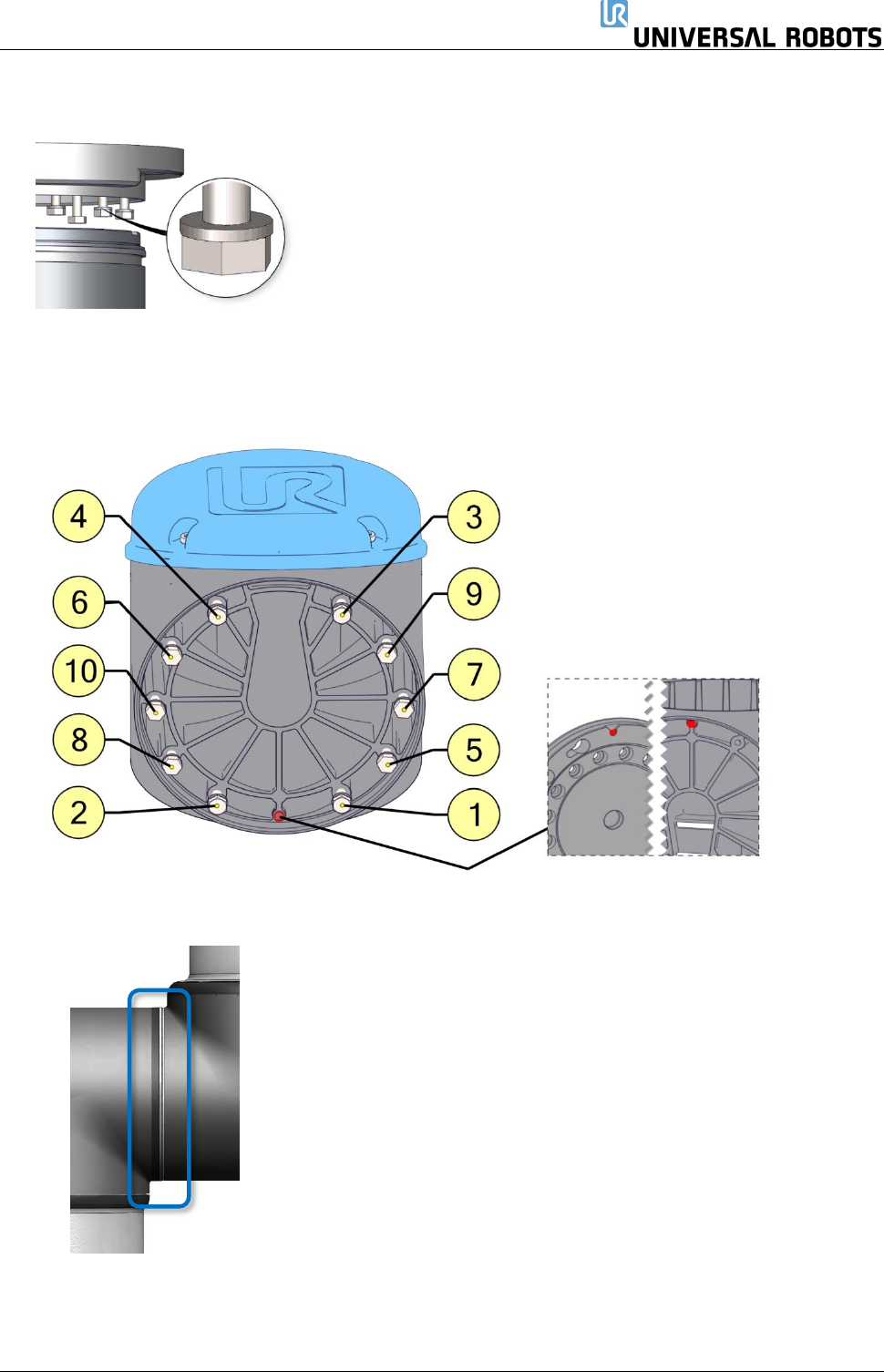
保留所有 权 利 26 Servicemanual_UR1 0_en_3.2.6 2. 确保所有垫圈均与螺栓 头齐平(这 至关重要), 然后,顺时 针轻轻扭转零 件大约 5 度,直至到达 机械止动位置。 3. 轻轻拧紧螺钉,直到其 几乎处于正 确位置,然后 ,交叉拧紧 (如下图所示 )。 始终从位于对准丝锥的 螺钉开始 上紧至正确的扭矩,确 保两个面平 行。 请参见 3.1.5 扭矩值 4. 将灰色特氟隆环滑动到 位,并轻轻 地将扁型环…