ServiceManual_UR10_zh_3.2.6.pdf - 第38页
保留所有 权 利 38 Servicemanual_UR1 0_en_3.2.6 添加插头和锁环只需 5 个简单的步 骤。 定位机器人时,肘部低 于底座关节 。将将便于插 入插头。 1. 拆下肘部关节与上臂之 间的扁型环 。 对于该目的,可以使用 镊子。小心 不要损坏扁型 环。 2. 确保所有螺栓紧固至 2.6Nm !2.6Nm !
保留所有权利 37 Servicemanual_UR10_en_3.2.6
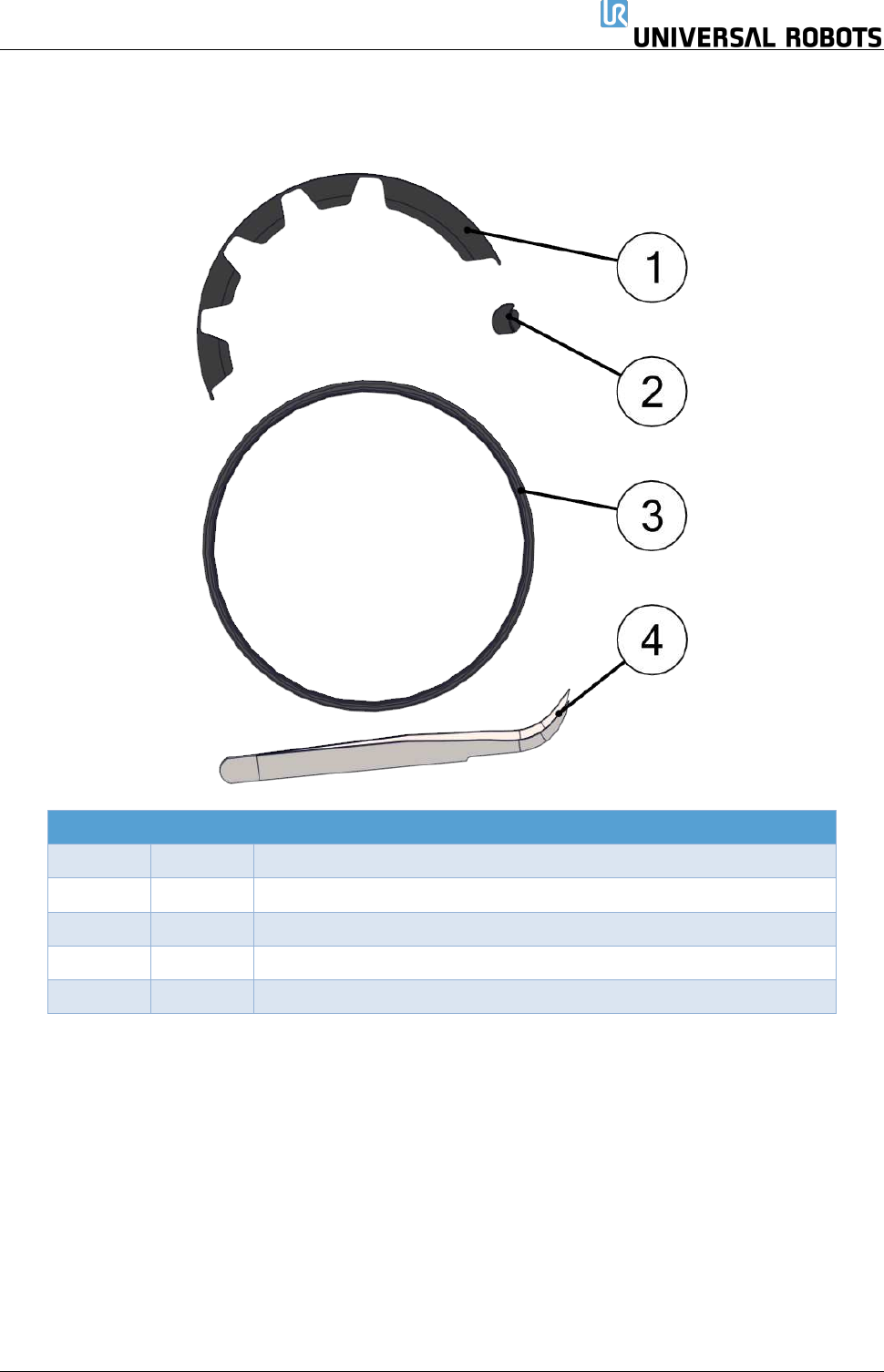
UR10 肘部锁包含以下零件。
UR10 肘部锁 – 103810
序号
数量
描述
1
3
锁环
2
12
插头
3
1
扁型环
4
1
镊子
注意:只需要 10 个插头和 2 个锁环,其余均为备件。
保留所有权利 38 Servicemanual_UR10_en_3.2.6
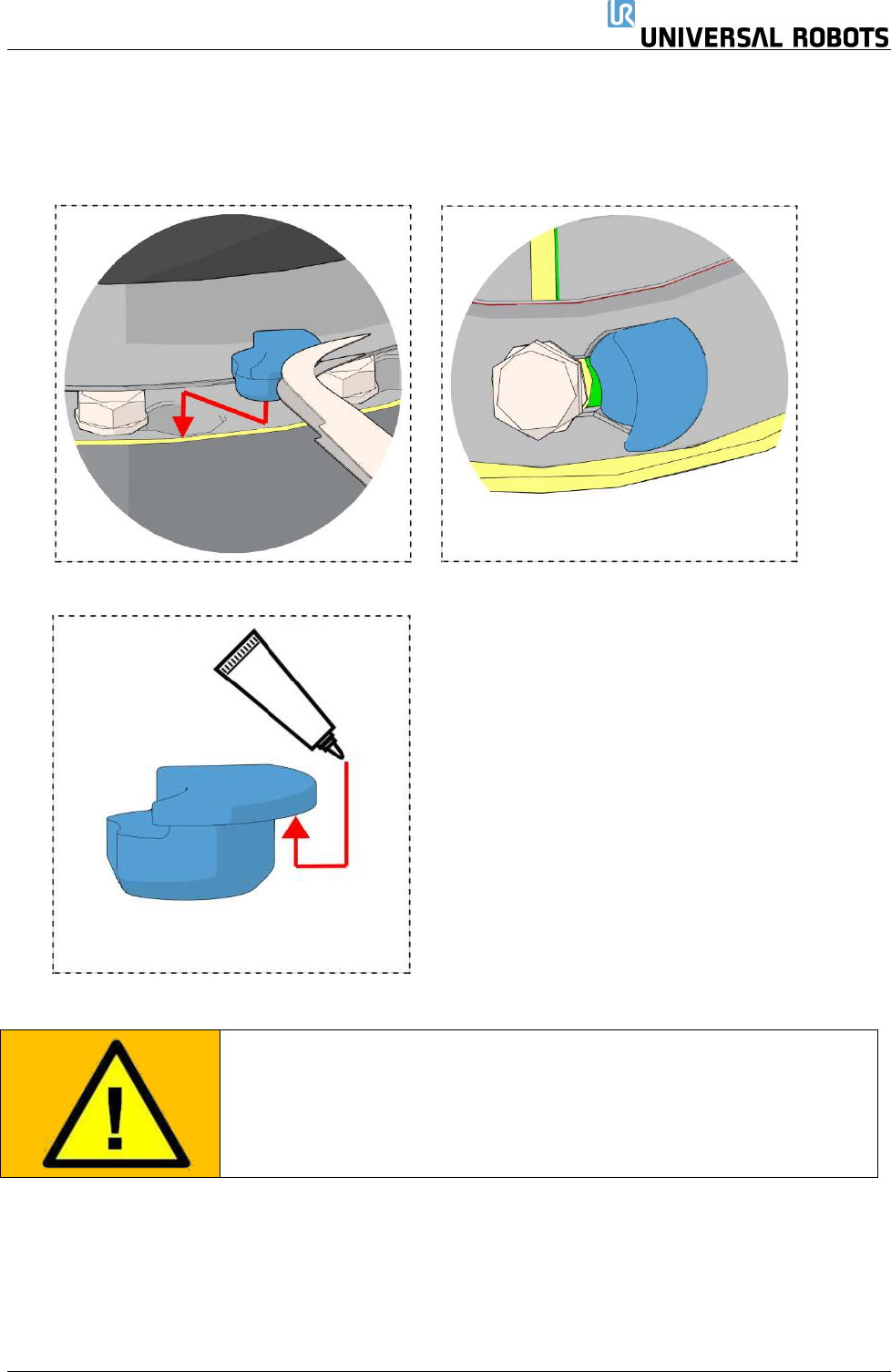
添加插头和锁环只需 5 个简单的步骤。
定位机器人时,肘部低于底座关节。将将便于插入插头。
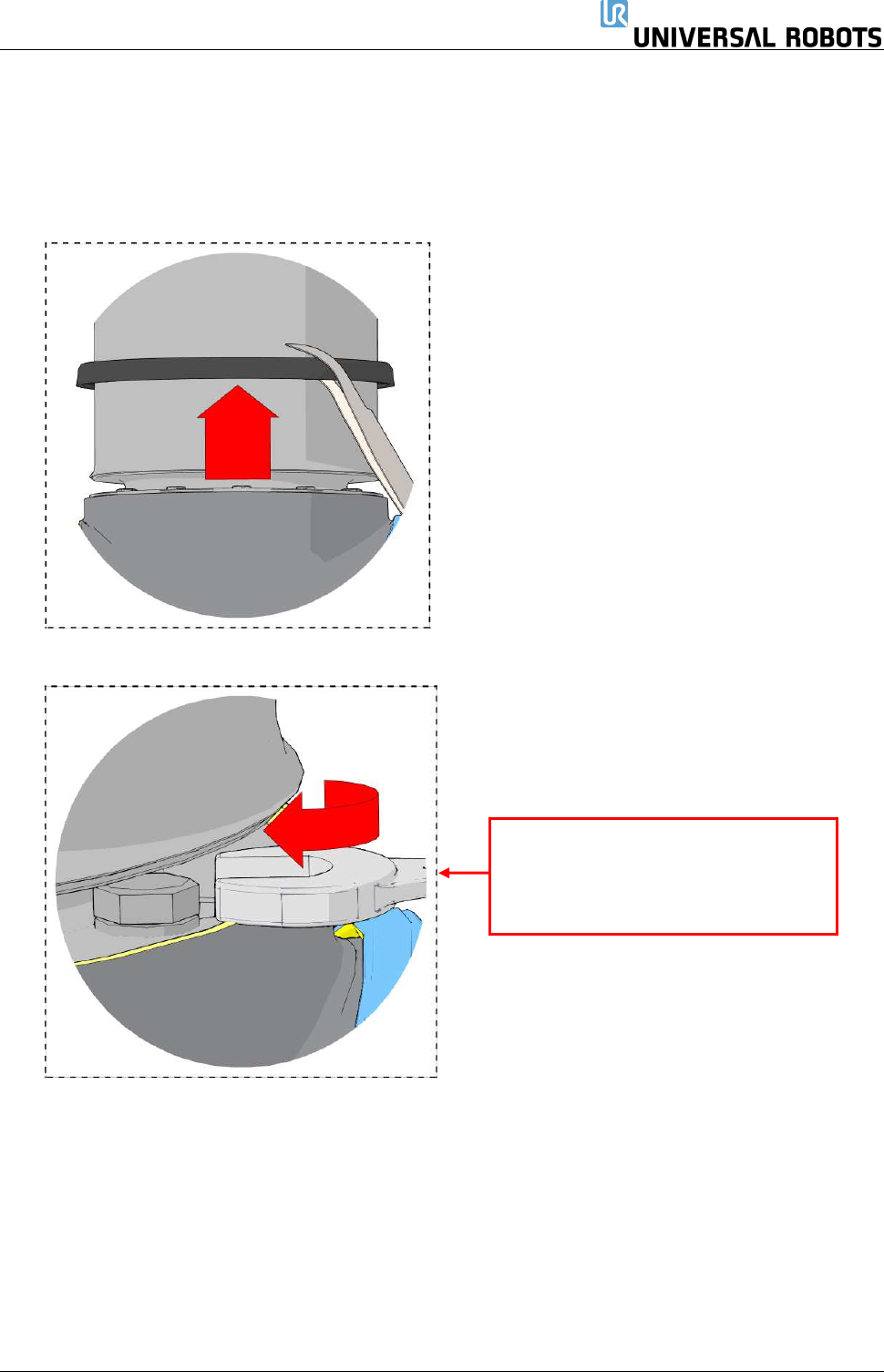
1. 拆下肘部关节与上臂之间的扁型环。
对于该目的,可以使用镊子。小心不要损坏扁型环。
2. 确保所有螺栓紧固至 2.6Nm
!2.6Nm !