ServiceManual_UR10_zh_3.2.6.pdf - 第55页
保留所有 权 利 55 Servicemanual_UR1 0_en_3.2.6 12. 按 Return to Normal (恢复正常) 。 13. 通过将机器人移动到原 位,对零位 进行验证。 如果对零位不满意,请 再次执行该 程序。
保留所有权利 54 Servicemanual_UR10_en_3.2.6
节。
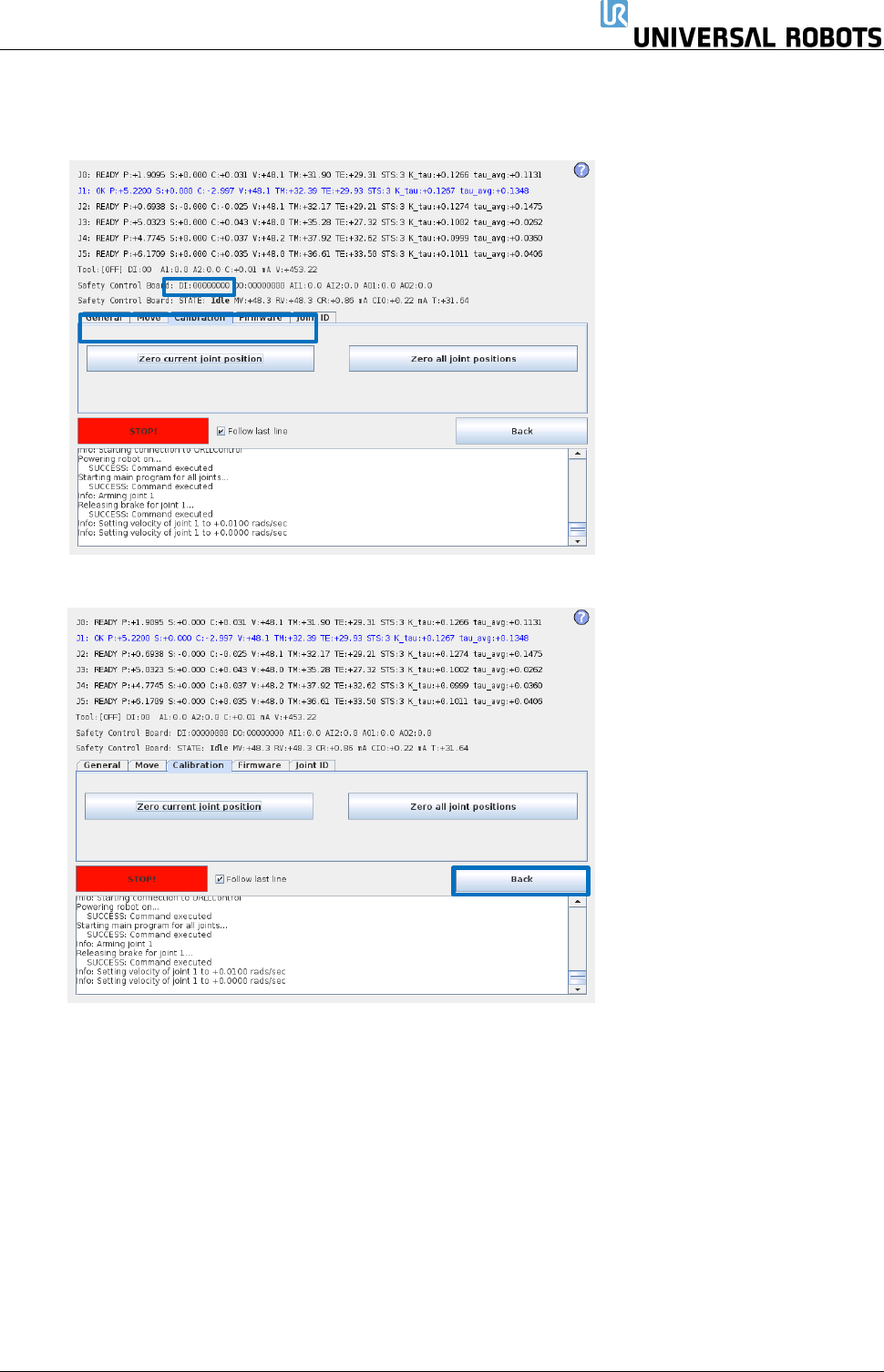
10. 选择Calibration
(
校准
)
选项卡,然后按 Zero current joint position
(当前关节位置归零)
校准关节。
11. 按 Back
(返回),退出
Low Level Control(低级控制)。
保留所有权利 55 Servicemanual_UR10_en_3.2.6
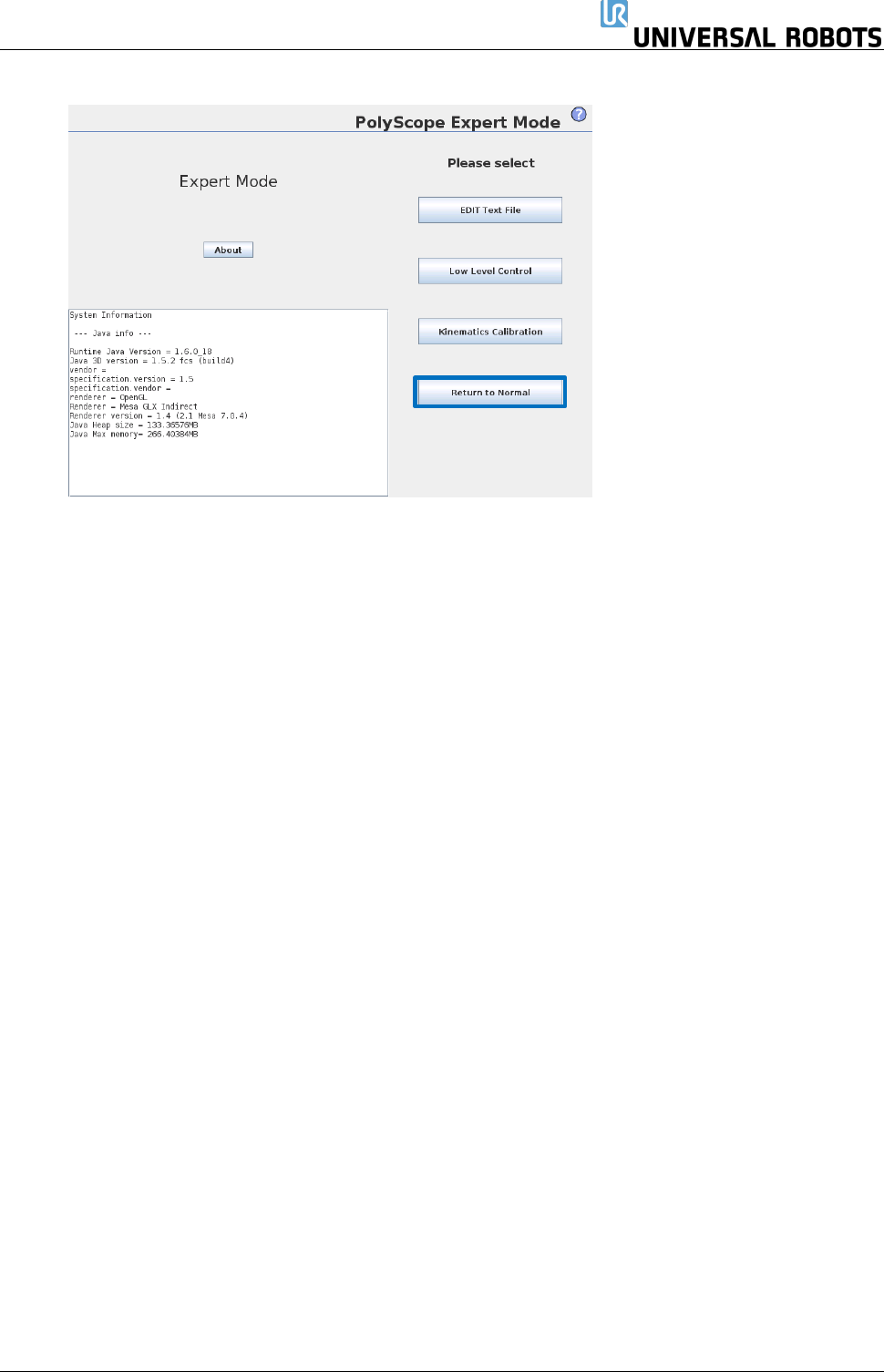
12. 按 Return to Normal
(恢复正常)。
13. 通过将机器人移动到原位,对零位进行验证。
如果对零位不满意,请再次执行该程序。
保留所有权利 56 Servicemanual_UR10_en_3.2.6
3.1.16 双机械臂校准
双机械臂校准套件(零件号码:185500)
双机械臂校准过程在整个工作空间对机器人进行校准。所有机器人在出厂前均经过双机械臂校准。
如果更换了关节,则工厂校准不再有效。
有 2 种选择:
• 更换关节后进行双机械臂校准可使机器人在生产线上工作,无需修改机器人程序中的路点。
若要进行双机械臂校准,您需要:2个机器人(相同尺寸和相同世代)、调校脚架和校准工具
连接器。
转到
www.universal-robots.com/support/,下载 PDF 格式的校准手册。
• 简单关节校准(如
3.1.15 校准关节的说明)所述。 更换关节后,可以调整关节的零位,但不
能达到双机械臂校准方法所达到的校准质量。可能需要调整程序的路点。